Consider a particle \(P\) in motion relative to a referential \(\cE\text{.}\) Its position in \(\cE\) is defined by its position vector\(\br_{OP}\) relative to an origin \(O\) (an arbitrary point fixed in \(\cE\)).
Definition2.2.1.Velocity/Acceleration.
The velocity of \(P\text{,}\) denoted \(\vel_{P/\cE}\text{,}\) is the vector defined as
The speed of point \(P\text{,}\) denoted \(v_{P/\cE}\text{,}\) is the magnitude of its velocity vector. The acceleration of \(P\text{,}\) denoted \(\ba_{P/\cE}\text{,}\) is the vector defined as
In applications where only one referential is present, we generally omit to specify the dependence upon \(\cE\text{,}\) and we simply write the velocity and acceleration of \(P\) as \(\vel_P\) and \(\ba_P\text{.}\) But we must keep in mind that if \(\cF\) is another referential in motion relative to \(\cE\text{,}\) we expect \(\vel_{P / \cF}\) to be different from \(\vel_{P / \cE}\text{.}\)
Note that the velocity of \(P\) does not depend on the choice of origin of \(\cE\text{.}\) Consider \(O'\) another point attached to \(\cE\text{.}\) Then we can write \(\br_{O'P} = \br_{O'O} + \br_{OP}\text{.}\) This equality can be differentiated (relative to \(\cE\)) to give
since vector \(\br_{O'O}\) remains constant relative to \(\cE\text{.}\)
The acceleration of \(P\) characterizes the time rate-of-change of both the magnitude and direction of its velocity. In particular, the acceleration of a point with constant speed is not, in general, zero. The motion of \(P\) is said to be accelerated if \(\vel_P \cdot \ba_P \gt 0\text{.}\) Conversely, it is said to be decelerated if \(\vel_P \cdot \ba_P \lt 0\text{.}\) The trajectory of \(P\) in referential \(\cE\) is the locus described by \(P(t)\) as time varies from an instant \(t_0\) to an instant \(t_1> t_0\text{.}\) The velocity vector of \(P\) is tangent to the trajectory at point \(P\text{,}\) and is oriented in the sense of the trajectory.
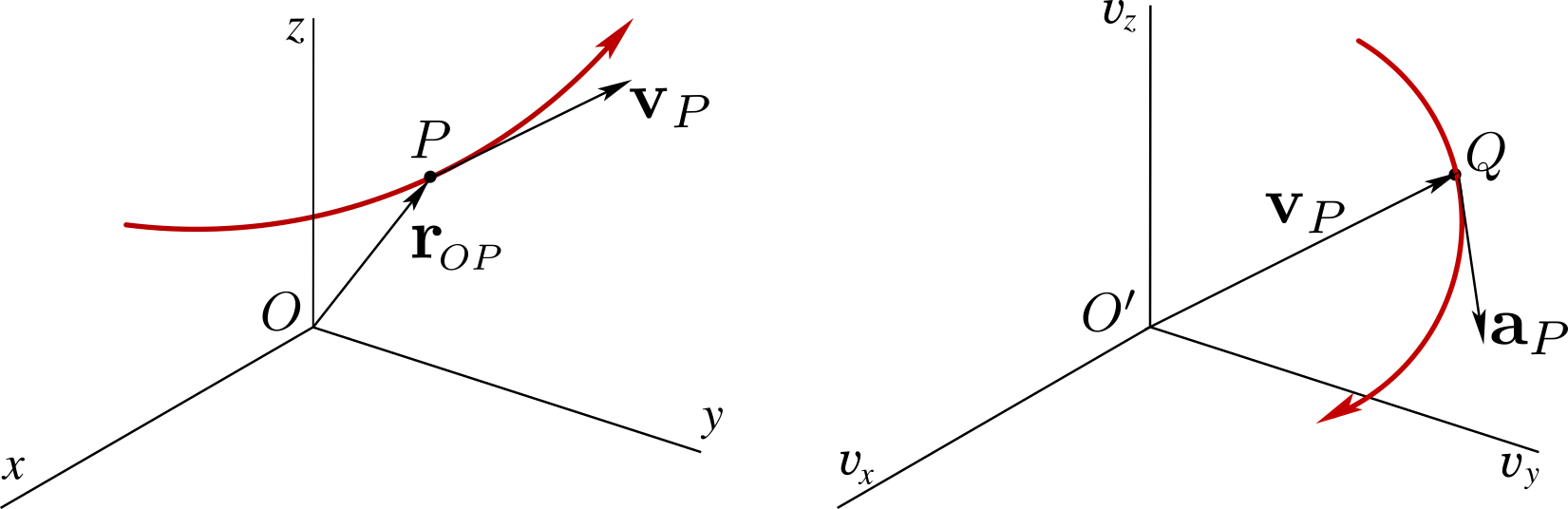
The acceleration of \(P\) is graphically less intuitive. We can visualize this vector in the following way: consider the fictitious point \(Q\) moving in the velocity space \(Ov_x v_y v_z\) and whose position vector is defined by the velocity of \(P\)
The trajectory of point \(Q\) as \(P\) moves in referential \(\cE\) is called the hodograph} of \(P\text{.}\) The velocity of \(Q\) is \(\ba_P\text{:}\) hence, the acceleration of \(P\text{,}\)\(\ba_P\text{,}\) is tangent to the hodograph at point \(Q\text{.}\) See Figure 2.2.2.
Figure2.2.2.Trajectory and hodograph of a point \(P\text{.}\)
In practice, the velocity and acceleration of \(P\) can be determined in a variety of ways depending on the chosen coordinate system within the same referential. As will be seen in the following sections, we can express the same velocity vector \(\vel_P\) (or any other vectorial quantity associated with the motion of \(P\)) in various ways depending on the choice of unit vectors which may be fixed or in motion relative to \(\cE\text{.}\)