Section 2.3 Calculation of Velocity and Acceleration
In this section, we determine the components of velocity and acceleration on the three coordinate systems defined in Section 1.2.
Subsection 2.3.1 Cartesian Coordinates of Velocity and Acceleration
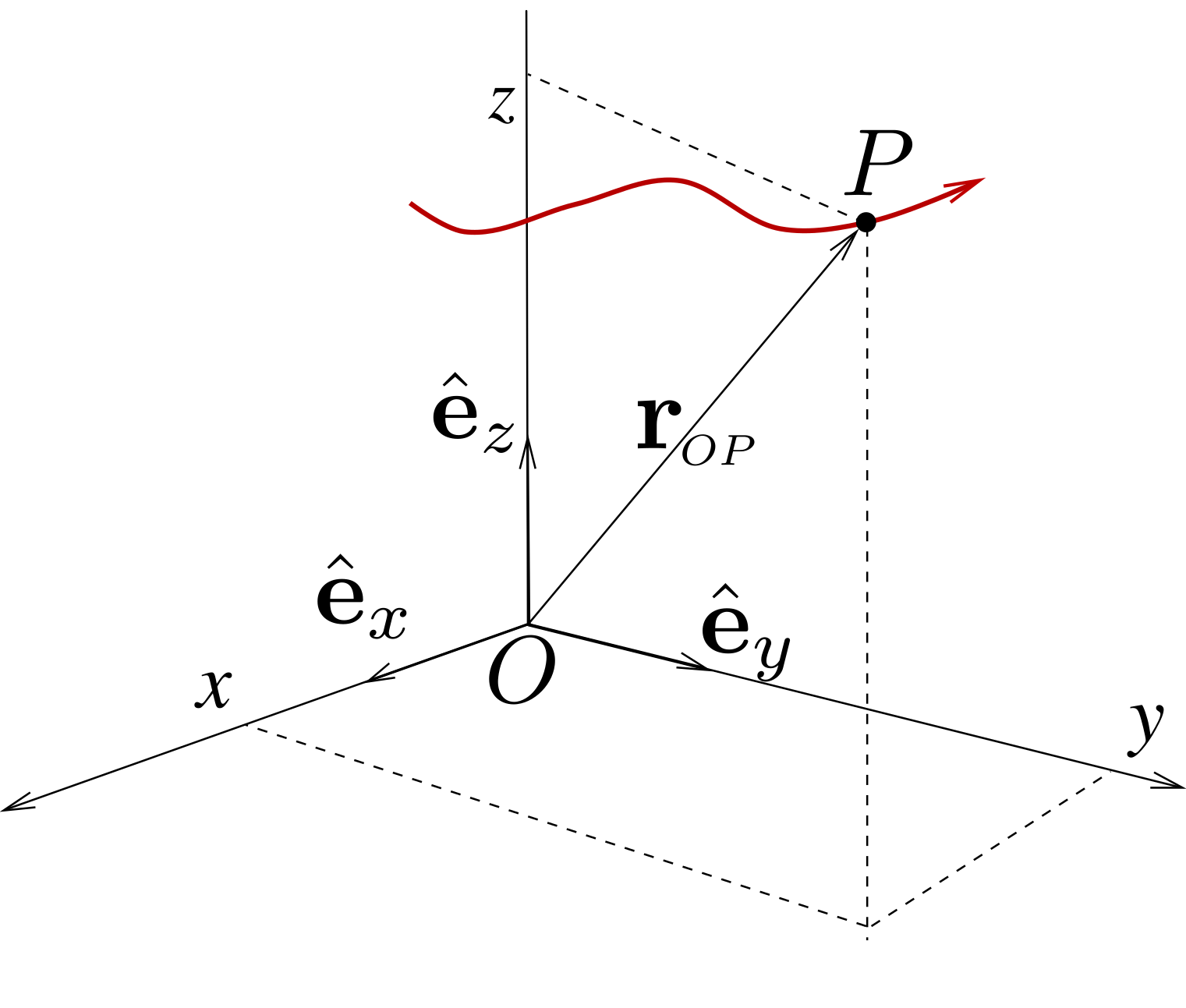
Consider three Cartesian axes \(Ox\text{,}\) \(Oy\) and \(Oz\) fixed in referential \(\cE\) and mutually perpendicular, directed on unit vectors \(\be_x\text{,}\) \(\be_y\) and \(\be_z\text{,}\) respectively. Let \((x, y, z)\) define the Cartesian coordinates of a particle \(P\) in motion in \(\cE\text{.}\) See Figure 2.3.1. The position of \(P\) is then defined by
\begin{equation}
\br_{OP} = x \be_x + y \be_y + z \be_z \tag{2.3.1}
\end{equation}
Then, the velocity of \(P\) is given by time-differentiation of \(\br_{OP}\) relative to \(\cE\text{:}\)
\begin{equation}
\vel_{P/\cE} = \dx \be_x + \dy \be_y + \dz \be_z \tag{2.3.2}
\end{equation}
Cartesian coordinates are not always well-suited for the kinematics of particles, especially, for curvilinear motion. The cylindrical and spherical coordinate systems are the most widely used curvilinear coordinate systems. But other coordinate systems can be devised.
Subsection 2.3.2 Cylindrical Coordinate System
Given Cartesian axes \(Oxyz\) attached to referential \(\cE\text{,}\) let \((r, \te, z)\) define the cylindrical coordinates of a particle \(P\) in motion in \(\cE\text{.}\) See Figure 2.3.2.
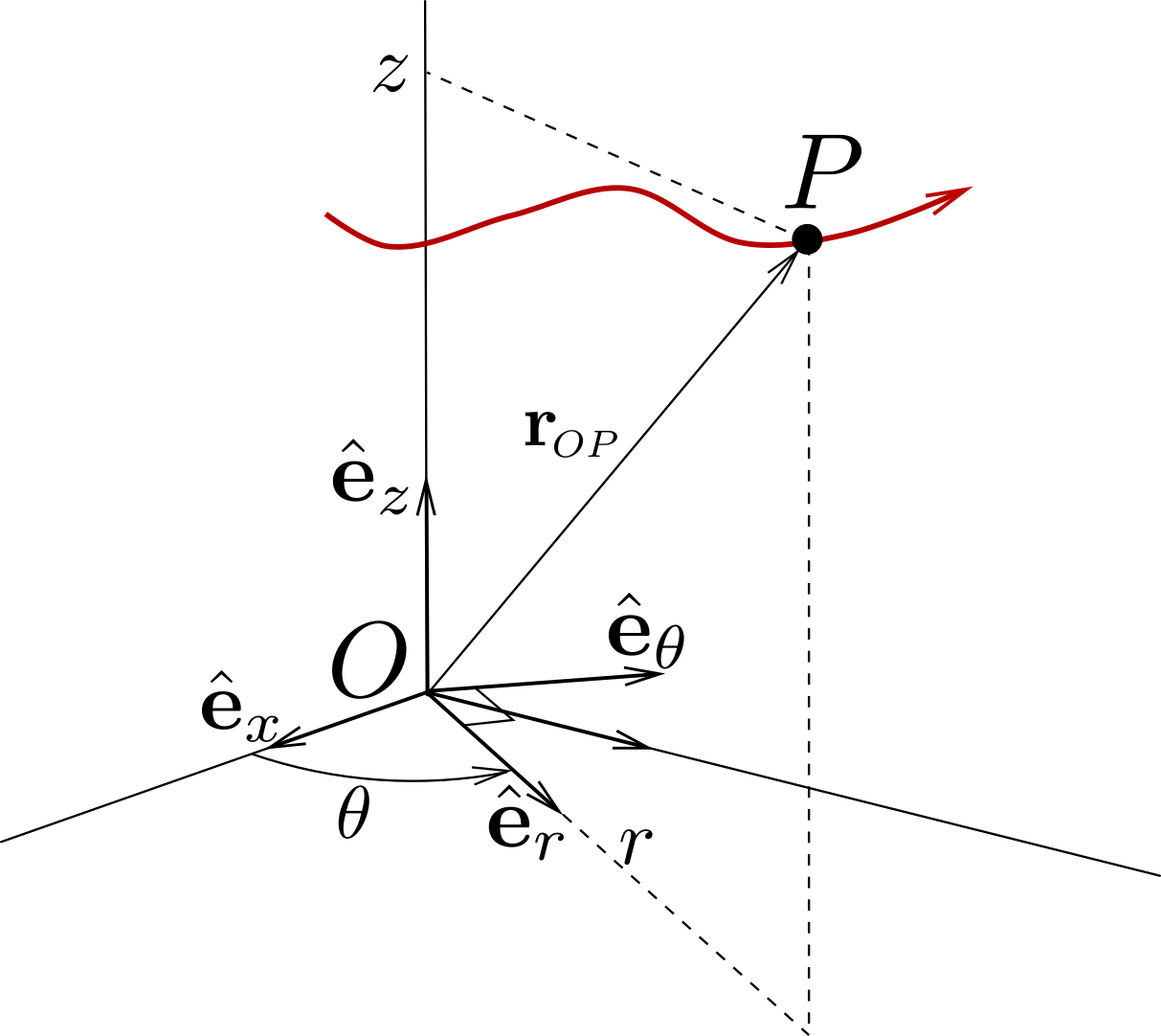
On basis \((\be_r , \be_\te , \be_z )\text{,}\) the position vector of \(P\) takes the expression
\begin{equation}
\br_{OP} = r \be_r + z \be_z\tag{2.3.3}
\end{equation}
Both unit vectors \(\be_r\) and \(\be_\te\) are function of angle \(\te\) and are time-dependent. The velocity \(\vel_P\) and acceleration \(\ba_P\) are obtained in basis \((\be_r , \be_\te , \be_z )\) by time-differentiation of \(\br_{OP}\text{:}\)
\begin{equation*}
\vel_P = \dr \be_r + r \frac{d \be_r}{dt} + \dz \be_z
\end{equation*}
with
\begin{equation*}
\frac{d\be_r}{dt}= \frac{d}{dt} (\cos\te \be_x +\sin\te\be_y )= \dte (-\sin\te \be_x +\cos\te\be_y )
= \dte \be_\te
\end{equation*}
Hence we obtain the expression of \(\vel_P\) on basis \((\be_r , \be_\te , \be_z )\text{:}\)
\begin{equation}
\vel_P = \dr \be_r + r \dte \be_\te + \dz \be_z\tag{2.3.4}
\end{equation}
The expression of acceleration \(\ba_P\) is obtained by time-differentiation of equation (2.3.4), and recalling that \(d\be_\te / dt = - \dte \be_r\text{:}\)
\begin{equation*}
\ba_P = \ddr \be_r + \dr \frac{d \be_r}{dt} + (\dr \dte + r \ddte) \be_\te
+ r\dte \frac{d \be_\te}{dt} + \ddz \be_z = \ddr \be_r + \dr \dte \be_\te + (\dr \dte + r \ddte) \be_\te
- r\dte^2 \be_r + \ddz \be_z
\end{equation*}
Finally we obtain, by regrouping the components,
\begin{equation}
\ba_P = (\ddr - r\dte^2 ) \be_r + (2 \dr \dte + r \ddte) \be_\te + \ddz \be_z\tag{2.3.5}
\end{equation}
In central force motions, the following expression for the \(\be_\te\)-component of \(\ba_P\) is useful:
\begin{equation}
a_\te = \ba_P \cdot \be_\te = \frac{1}{r} ( 2 r \dr \dte + r^2 \ddte) =
\frac{1}{r} \frac{d}{dt}(r^2 \dte)\tag{2.3.6}
\end{equation}
valid as long as \(r \neq 0\text{.}\)
Subsection 2.3.3 Spherical Coordinate System
Given a Cartesian system \(Oxyz\) attached to referential \(\cE\text{,}\) we denote by \((\rho , \phi, \te)\) the spherical coordinates of a particle \(P\) in motion relative to \(\cE\text{.}\) See Figure 2.3.3.
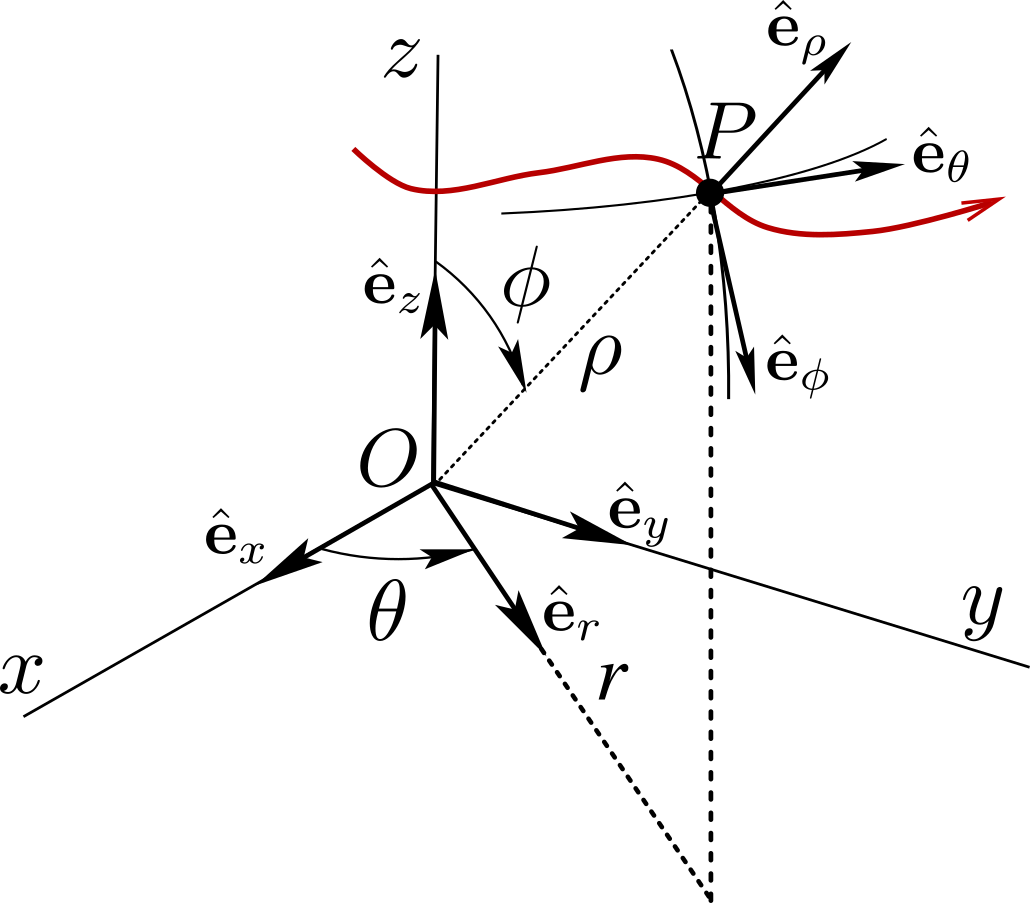
On basis \((\be_\rho , \be_\phi , \be_\te)\) the position vector of \(P\) can be written as
\begin{equation}
\br_{OP} = \ro \be_\ro\tag{2.3.7}
\end{equation}
The spherical basis vectors \((\be_\rho ,\be_\phi , \be_\te)\) become vector functions of time, just as angles \(\phi\) and \(\te\) are scalar functions of time. The velocity of \(P\) is obtained by taking the time-derivative of the position vector \(\br_{OP}\text{:}\)
\begin{equation*}
\vel_P = \dro \be_\ro + \ro \frac{d\be_\ro}{dt}
\end{equation*}
To determine the derivative of \(\be_\ro\text{,}\) we first write \(\be_\ro\) on unit vector \(\be_r\) and \(\be_z\text{:}\) \(\be_\ro = \cos\phi \be_z + \sin\phi \be_r\text{.}\) We then obtain 1
\begin{equation*}
\frac{d\be_\ro}{dt} =
- \dphi \sin\phi \be_z + \dphi \cos\phi \be_r + \sin\phi { d\be_r\over dt}
= \dphi (- \sin\phi \be_z + \cos\phi \be_r ) + \dte \sin\phi \be_\te
\end{equation*}
where we have used \(d\be_r /dt = \dte \be_\te\text{.}\) Then we recognize that \((- \sin\phi \be_z + \cos\phi \be_r ) = \be_\phi\text{.}\) Finally, we obtain
\begin{equation}
{d \be_\ro \over dt} = \dphi \be_\phi + \dte \sin\phi \be_\te \tag{2.3.8}
\end{equation}
and we verify that \(\be_\ro \cdot (d \be_\ro /dt) =0\text{.}\) The velocity vector in spherical coordinates is then given by
\begin{equation}
\vel_P = \dro \,
\be_\ro + \ro \dphi \, \be_\phi + \ro \dte \sin\phi \, \be_\te \tag{2.3.9}
\end{equation}
The expression of the acceleration of \(P\) in spherical coordinates is obtained by differentiating equation (2.3.9). Thus we need the time-derivative of unit vector \(\be_\phi\text{.}\) Proceeding like \(\be_\rho\text{,}\) we easily obtain
\begin{equation}
{d \be_\phi \over dt} = - \dphi \be_\ro + \dte \cos\phi \be_\te \tag{2.3.10}
\end{equation}
The components of \(\ba_P = a_\rho \be_\rho + a_\phi \be_\phi + a_\te \be_\te\) on basis \((\be_\ro , \be_\phi , \be_\te)\) are then given by
\begin{equation}
\begin{array}{ll}
a_\rho \amp = \ddro - \ro \dphi^2 - \ro \dte ^2 \sin^2\phi \\
a_\phi \amp = 2\dro \dphi + \ro\ddphi - \ro \dte^2 \cos\phi\sin\phi \\
a_\te \amp = 2\dro \dte \sin\phi + 2 \ro \dphi \dte \cos\phi
+ \ro \ddte \sin\phi
\end{array}\tag{2.3.11}
\end{equation}
