where \((\bhb_1, \bhb_2, \bhb_3)\) is a basis of \(\cB\text{,}\) and where the time-derivatives are taken relative to \(\cA\text{.}\)
3.
Assume that the motion of body \(\cB\) relative to referential \(\cA\) is characterized by the rotation \(\cR_{\te,\bu}\) of angle \(\alpha\) about unit vector \(\bu\text{.}\) Recall that any vector \(\bV_0\) attached to \(\cA\) is mapped to a vector \(\bV\) attached to \(\cB\) according to Rodrigues formula:
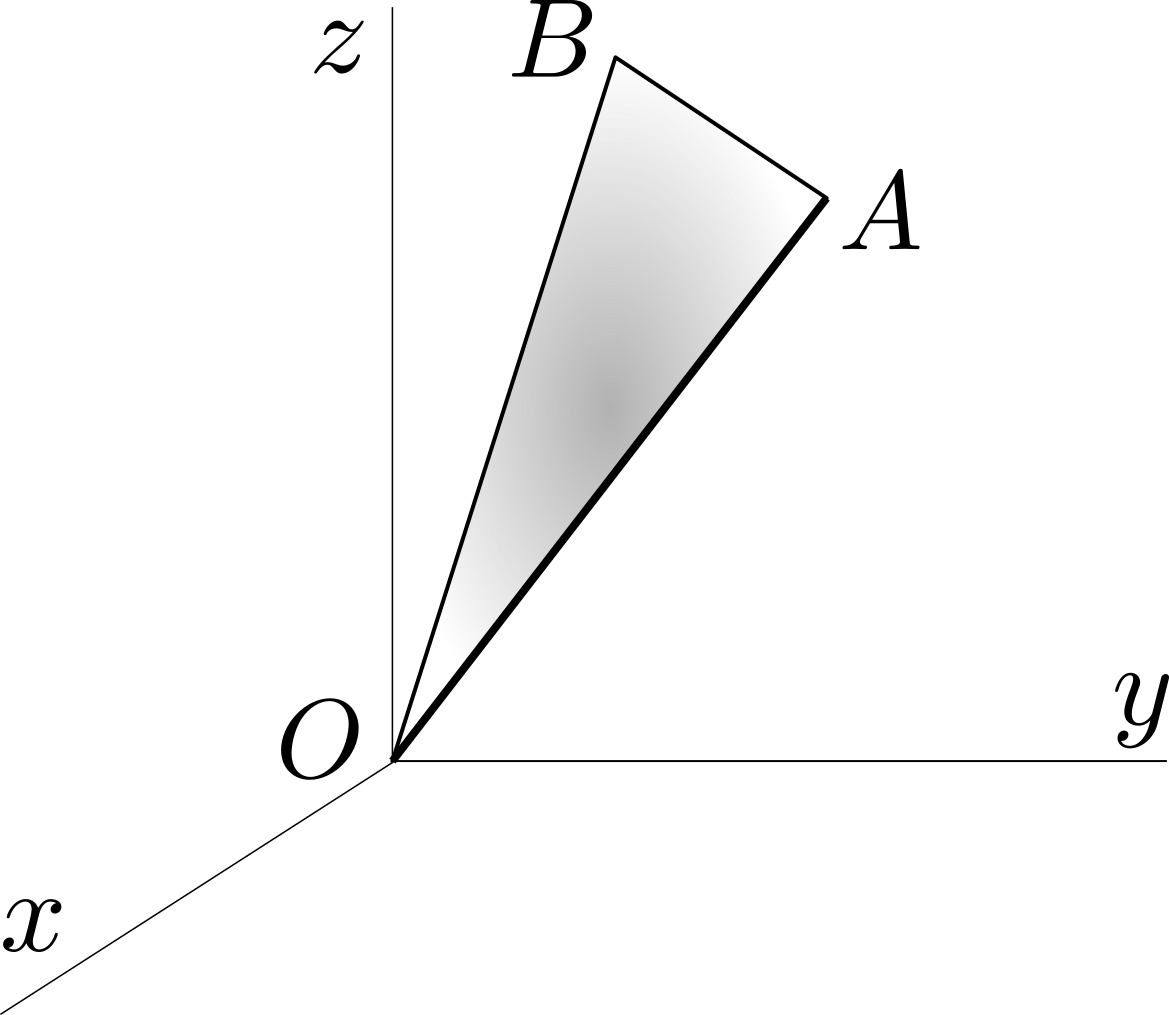
A rigid body in the shape of an isosceles triangle \(AOB\) (\(OA = OB\)). rotates about the origin \(O\) of a referential \(\cE\text{.}\) See Figure 3.7.1. Show that the velocities of vertices \(A\) and \(B\) satisfy the following property: \(\vel_A \cdot \br_{OB} = - \vel_B \cdot \br_{OA}\)
Figure3.7.1.
Solution.
Express the velocity of \(A\) and \(B\) relative to \(\cE\) in terms of the angular velocity of the body:
Consider a rigid body \(\cB\) in motion relative to a referential \(\cE\text{.}\) Given a unit vector \(\bz\) attached to \(\cB\text{,}\) show that the angular velocity of \(\cB\) relative to \(\cE\) can be written in the following form
where \(\om_z = \bz\cdot \bom_{\cB /\cE} \text{.}\)
6.
In the Eulerian formulation of continuum mechanics, the velocity field \(\vel (x_1, x_2, x_3 , t)\) of a material system is defined at every point \((x_1, x_2,
x_3)\) of a referential \(\cE (O, \be_1, \be_2, \be_3)\text{.}\) Show that the velocity field \(\vel (x_1, x_2, x_3 , t)\) is that of a rigid body \(\cF\) if and only if \(\partial_i v_j + \partial_j v_i = 0\)\((i,j =1,2,3)\) where \(\partial_i = \partial / \partial x_i\) and \(v_i = \vel \cdot \be_i\text{.}\) When this condition is satisfied, find the corresponding angular velocity \(\bom_{\cF / \cE}\text{.}\)
Solution.
First assume that the field \(\vel\) is the velocity field of a rigid body. Then at any time, this field satisfies \(\vel({\bf x}, t ) = \vel (\bze, t)
+ \bom \times \br_{OP}\) which leads to the equations of \((\be_1, \be_2, \be_3)\text{:}\)
where \(\br_{OP} = x_i \be_i\text{,}\)\(\vel_P = v_i \be_i\) and \(\vel_O = v_{Oi} \be_i\text{.}\) Then by taking \(\partial_i\) for each coordinate \(v_j\) we obtain:
The converse proof consists in showing that, if \(\partial_i v_j = -\partial_j v_i\text{,}\) then field \(\vel\) is the velocity field of a rigid body follows from the skew-symmetry of tensor \(\grad \vel\text{.}\)\(\blacksquare\)
7.
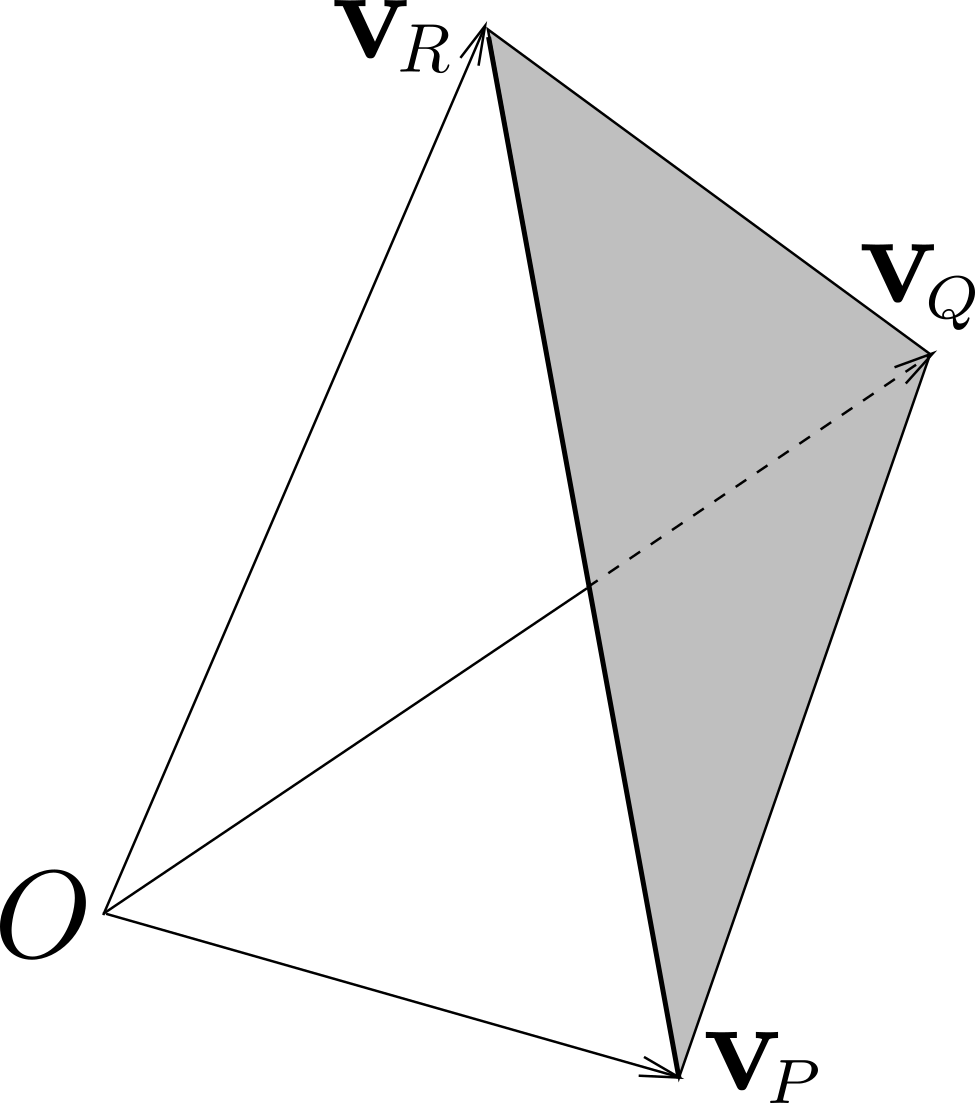
Consider at a given time the velocities \(\vel_P\text{,}\)\(\vel_Q\) and \(\vel_R\) of three points attached to the same rigid body \(\cB\) in motion relative to a referential \(\cA\text{.}\) Then consider the plane passing through the endpoints of the three vectors \(\vel_P\text{,}\)\(\vel_Q\) and \(\vel_R\) originating from a common arbitrary point \(O\text{.}\) See Figure 3.7.2.
Show that the normal to this plane is directed along the angular velocity \(\bom_{\cB /\cA}\) of \(\cB\text{.}\)
Figure3.7.2.
Solution.
Define the 3 fictitious points (in the velocity space) \(A\text{,}\)\(B\) and \(C\) by
assuming \(\lambda = (\bom\times \br_{PQ}) \cdot \br_{PR} \neq 0\text{.}\) Since vector \(\br_{AB}\times \br_{AC}\) is normal to plane \(ABC\text{,}\) we conclude that \(\bom\) is also normal to the plane \(ABC\text{.}\)
\(\blacksquare\)
8.
A rigid body \(\cB\) is in motion relative to a referential \(\cE\text{.}\) We are interested to study the field \(\vel_{P\in \cB /\cE}\)at a particular instant when the points \(P\) lie on a line \(\cal L\text{.}\) Call \(\bom\) the angular velocity of \(\cB\) at this instant. Also denote by \(\vel_A = \vel_{A\in\cB /\cE}\) the velocity of a particular point \(A\) of \(\cal L\text{.}\)
Show that in general the magnitude of \(\vel_{P\in \cB /\cE}\) must reach a minimum along line \(\cal L\text{.}\) Find the point \(P_*\) where this minimum is reached.
Is there a point of \(\cal L\) for which \(\vel_{P\in \cB /\cE}\) is collinear to a unit vector \(\hat{\boldsymbol{\delta}}\) directed along \(\cal L\text{?}\)
9.
A rigid body \(\cB\) of basis \((\bhb_1 , \bhb_2, \bhb_3)\) and origin \(B\) is in motion relative to a referential \(\cE\text{.}\) Consider the three points \(P\text{,}\)\(Q\) and \(R\) fixed in \(\cB\) defined by the position vectors \(\br_{BP}= a \bhb_1\text{,}\)\(\br_{BQ}= a \bhb_2\text{,}\) and \(\br_{BR}= a \bhb_3\) (\(a\) is a positive constant). The motion of \(\cB\) relative to \(\cE\) is characterized by the following conditions valid at all time:
Find the angular velocity \(\bom_{\cB / \cE}\text{,}\) the velocity and acceleration of point \(B\text{.}\) Show that the motion of \(\cB\) relative to \(\cE\) cannot be a rotation.
Solution.
First, we find angular velocity \(\bom = \bom_{\cB/\cE} = \om_1 \bhb_1 +\om_2 \bhb_2 +\om_3 \bhb_3\) by relating velocities \(\vel_P\) and \(\vel_Q\) to each other: from equation \(\vel_Q = \vel_P + \bom \times \br_{PQ}\text{,}\) we obtain
It is tempting to conclude that the motion of \(\cB\) is a rotation along some axis directed along \(\be_1\text{:}\) to verify this assertion, we ask if we can find points \(Q\) of \(\cB\) such that \(\vel_Q =0\text{:}\) then, such points would satisfy
We see that this equation does not have a solution since \(\bhb_1 \cdot ( \bhb_1 + 2 \bhb_2 -\bhb_3) \neq 0\text{.}\)The motion of \(\cB\) is not a rotation.\(\blacksquare\)
10.
Consider a linear operator \(\cL : \bV \mapsto \bW = \cL(\bV)\text{.}\) Show that
where \(\Omega_{B/A}\) is the operator: \(\bV \mapsto \bom_{\cA/\cB}\times \bV\text{.}\)
11.
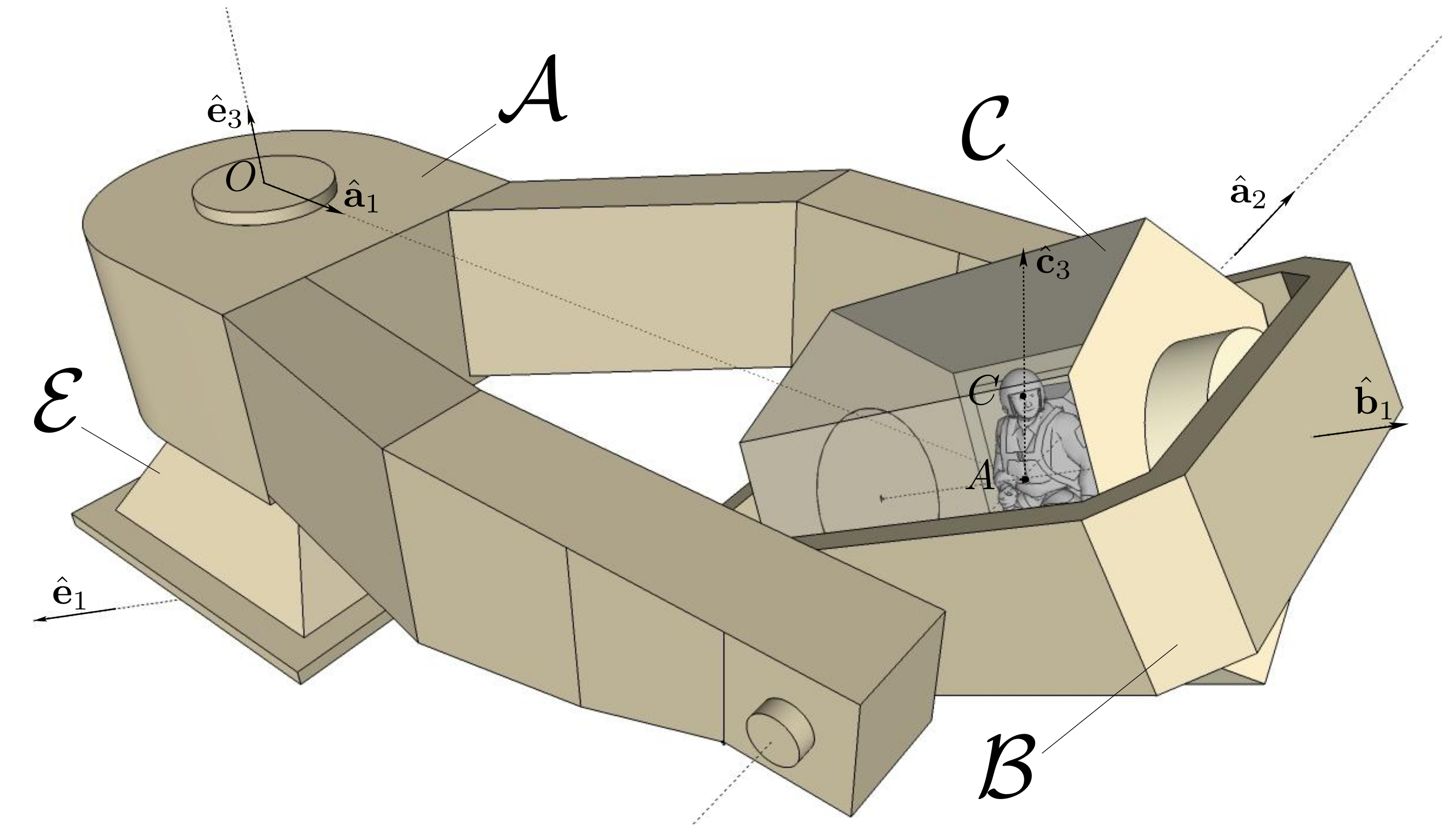
Human centrifuges are large ground-based centrifuges used to submit pilots to g-force environment they would encounter during the maneuvers of high-performance aircraft. They provide a testing and training platform for pilots subjected to the adverse effects (such as loss of consciousness) of large accelerations. A model of a 3-axis human centrifuge displayed in Figure 3.7.3 is comprised of the following rigid bodies:
(i) the arm \(\cA ( O, \bha_1 , \bha_2, \bha_3 = \be_3)\) is rotation about vertical axis \((O, \be_3)\) of referential \(\cE ( O, \be_1 , \be_2, \be_3)\text{.}\)
(ii) the gimbal \(\cB (A, \bhb_1 , \bhb_2 = \bha_2 , \bhb_3 )\) in rotation about axis \((A, \bha_2)\) of arm \(\cA\text{.}\) Position of point \(A\) is defined by \(\br_{OA}= L \bha_1\) where \(L\) is a constant.
(iii) the cab \(\cC (A, \bhc_1 = \bhb_1 , \bhc_2 , \bhc_3 )\) including its passenger in rotation about axis \((A, \bhb_1)\) of gimbal \(\cB\text{.}\)
Figure3.7.3.
Hence the cab is allowed to pitch and roll relative to the arm. From the point of view of the passenger, the axes \((A, \bhc_1)\text{,}\)\((A, \bhc_2)\) and \((A,\bhc_3)\) points from side to side, back to front, and toe to head, respectively. The point \(C\) whose position is defined by \(\br_{AC} = l \bhc_3\) is located at the level of the passenger’s head. The acceleration felt by the pilot is the vector \(\bG = \bg - \ba_{C\in \cC/\cE}\) where \(\bg = - g \be_3\) is the gravitational acceleration, and \(\ba_{C\in \cC/\cE}\) is the acceleration of point \(C\) attached to body \(\cC\text{.}\)
The centrifuge has three degrees of freedom modeled by the angles \(\psi\text{,}\)\(\theta\) and \(\phi\) which define the orientations of the bases of \(\cA\text{,}\)\(\cB\) and \(\cC\) as defined in Figure 3.7.4.
Find the velocity \(\vel_{C\in \cC /\cE}\) as a function of angles \(\psi\text{,}\)\(\te\) and \(\phi\) and their time-derivatives.
Assume that \(l \ll L\) and set \(l=0\text{.}\) Express vector \(\bG\) in the basis \((\bhc_1 , \bhc_2 , \bhc_3 )\) attached to \(\cC\text{.}\) It is desired to find control laws of the centrifuge so as to guarantee that the acceleration felt by the pilot is collinear to \(\bhc_3\text{,}\) that is, \(\bG\cdot\bhc_1 = \bG\cdot\bhc_2 =0\text{.}\) Find the corresponding angles \(\te\) and \(\phi\) as functions of \(g\text{,}\)\(L\text{,}\)\(\dpsi\) and \(\ddpsi\text{.}\)