This implies that the triple scalar product (\bS_2, \bS_1 , \br_{A_1 A_2}) vanishes. We conclude that the 3 vectors \(\bS_1\text{,}\)\(\bS_2\) and \(\br_{Q_2 Q_1}\) are coplanar (see Subsection A.1.4). The sliders’ axes are thus coplanar, and thus either intersect or are parallel.
The converse is also true. We can examine the two cases separately.
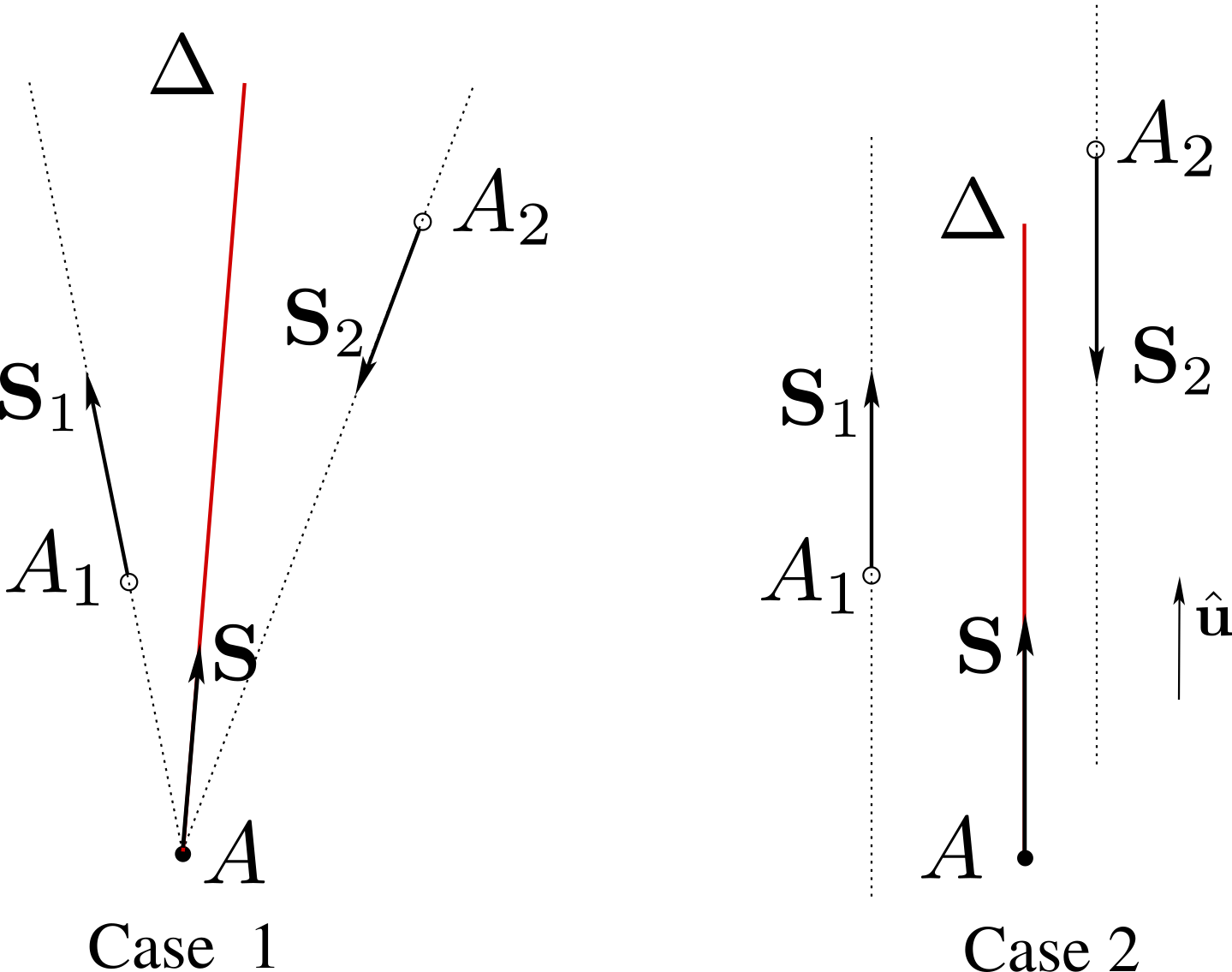
Figure4.5.1.Sum of Sliders. Case 1: concurrent axes, Case 2: parallel axes.
Case 1. If the sliders’ axes intersect at a common point \(A\text{,}\) then clearly the moment about \(A\) of screw \(\{\cS\}\) is zero. If in addition \(\bS =\bS_1+\bS)2\) is not zero, then screw \(\{\cS_1\}+ \{\cS_2 \}\) is a slider of axis \(\Delta = (A , \bS=\bS_1+\bS_2)\text{.}\) See Figure 4.5.1 (left).
Case 2. If the sliders’ axes are parallel along some unit vector \(\bu\text{,}\) then one can write \(\bS_i = \alpha_i \bu\) (\(i=1,2\)). Assume that the scalar \(\alpha_1+ \alpha_2\) is not zero. Then the vector \(\bS\) is not zero, and one can define a unique point \(A\) satisfying the equation
Point \(A\) is the barycenter of points \(A_1\) and \(A_2\) with the respective weights \(\alpha_1\) and \(\alpha_2\text{.}\) Then the moment about \(A\) of screw \(\{\cS_1\}+ \{\cS_2 \}\) is
We conclude that screw \(\{\cS_1\}+ \{\cS_2\}\) is a slider of axis \(\Delta = (A , \bS)\text{.}\) See Figure 4.5.1 (right).
In conclusion, we can state the following theorem.
Theorem4.5.2.Sum of Two Sliders.
The sum of two sliders of resultants \(\bS_1\) and \(\bS_2\) satisfying \(\bS_1 +\bS_2 \neq \bze\) is a slider if and only if the sliders’ axes either intersect or are parallel.
Example4.5.3.
In a Euclidean space \(\cE (O, \be_1, \be_2, \be_3)\) consider the sliders \(\{ \cS_1 \}\text{,}\)\(\{ \cS_2 \}\text{,}\) and \(\{ \cS_3 \}\) of axes \((O, \bS_1= \alpha\be_1)\text{,}\)\((A, \bS_2= \beta\be_1)\) and \((B, \bS_3 = \gamma (\be_3 - \be_2))\) respectively, where points \(A\) and \(B\) are defined by \(\br_{OA} = \be_2 + \be_3\) and \(\br_{OB}= \be_1+\be_2 \text{.}\) The scalars \(\alpha\text{,}\)\(\beta\) and \(\gamma\) are three real numbers.
Define the screw \(\{\cV \}\) as the sum \(\{\cS_1\} + \{\cS_2\} + \{\cS_3\}\text{.}\) Find the possible values of \((\alpha,\beta, \gamma)\) for which \(\{\cV \}\) is (i) a couple? (ii) a slider? (iii) \(\{ 0\}\) ?
Case (i). Screw \(\{\cV\}\) is a couple if the resultant \(\bV = (\alpha+\beta)\be_1- \gamma \be_2 +\gamma \be_3\) is zero. This occurs if \(\alpha+ \beta =0\) and \(\gamma =0\text{.}\) We must also require that the moment \(\bvv_O = \beta\be_2 -\beta\be_3\) is not zero, that is, \(\beta \neq 0\text{.}\)
Case (ii). Screw \(\{\cV\}\) is a slider if its resultant is non-zero and if its moment is zero at some point \(Q\text{:}\) the position of \(Q\) is given by \(\bV\times \br_{OQ} = - \bvv_O\text{.}\) A solvability condition of this equation is that \(\bv_O \cdot \bV = \gamma (\alpha -\beta) = 0\text{,}\) which imposes \(\gamma = 0\) or \(\alpha = \beta\text{.}\) We must also impose \(\bV \neq 0\text{.}\) This gives these 3 possibilities:
\(\gamma =0\) and \(\alpha+ \beta\neq0\text{,}\)
\(\al=\beta \neq 0\text{,}\) and
\(\alpha=\beta =0\) and \(\gamma\neq 0\text{.}\)
Case (iii). Screw \(\{\cV\}\) is \(\{0\}\) if \(\bV = \bze\) and \(\bvv_O = \bze\text{:}\) this imposes \(\alpha = \beta = \gamma = 0\text{.}\)
Next, we generalize the notion of axis defined for sliders to arbitrary screws. The axis of a screw plays a fundamental role in the decomposition of a screw as the sum of a couple and a slider, thereby revealing the unique structure of the associated vector field around its axis.