Here we consider the two special cases of the change of referential formulas (6.2.1)-(6.3.2) corresponding to translational motion and rotational motion.
Subsection6.4.1Translation
Recall that if \(\cF\) is in translational motion relative to \(\cE\text{,}\) its angular velocity and acceleration are zero at all times: \(\bom_{\cF/\cE} = \bze\text{,}\) and \(\bal_{\cF/\cE} = \bze\text{.}\) This implies that the transport velocity and acceleration take the same expression irrespective of the motion of point \(P\text{:}\)
Furthermore, the Coriolis acceleration of point \(P\) is necessarily zero. With these simplifications, the change of referential formulas (6.2.1) and (6.3.2) take the following form
If \(\cF\) is in rotational motion relative to \(\cE\) about axis \(\Delta (O, \be_3)\text{,}\) we may denote the angular velocity and acceleration of \(\cF\) as \(\bom_{\cF/\cE} = \om \be_3\text{,}\) and \(\bal_{\cF/\cE} = \dom \be_3\text{.}\) Then the transport velocity and acceleration of a point \(P\) take the following expression:
We now illustrate the application of the formulas (6.2.1) and (6.3.2) with a few examples.
Example6.4.1.
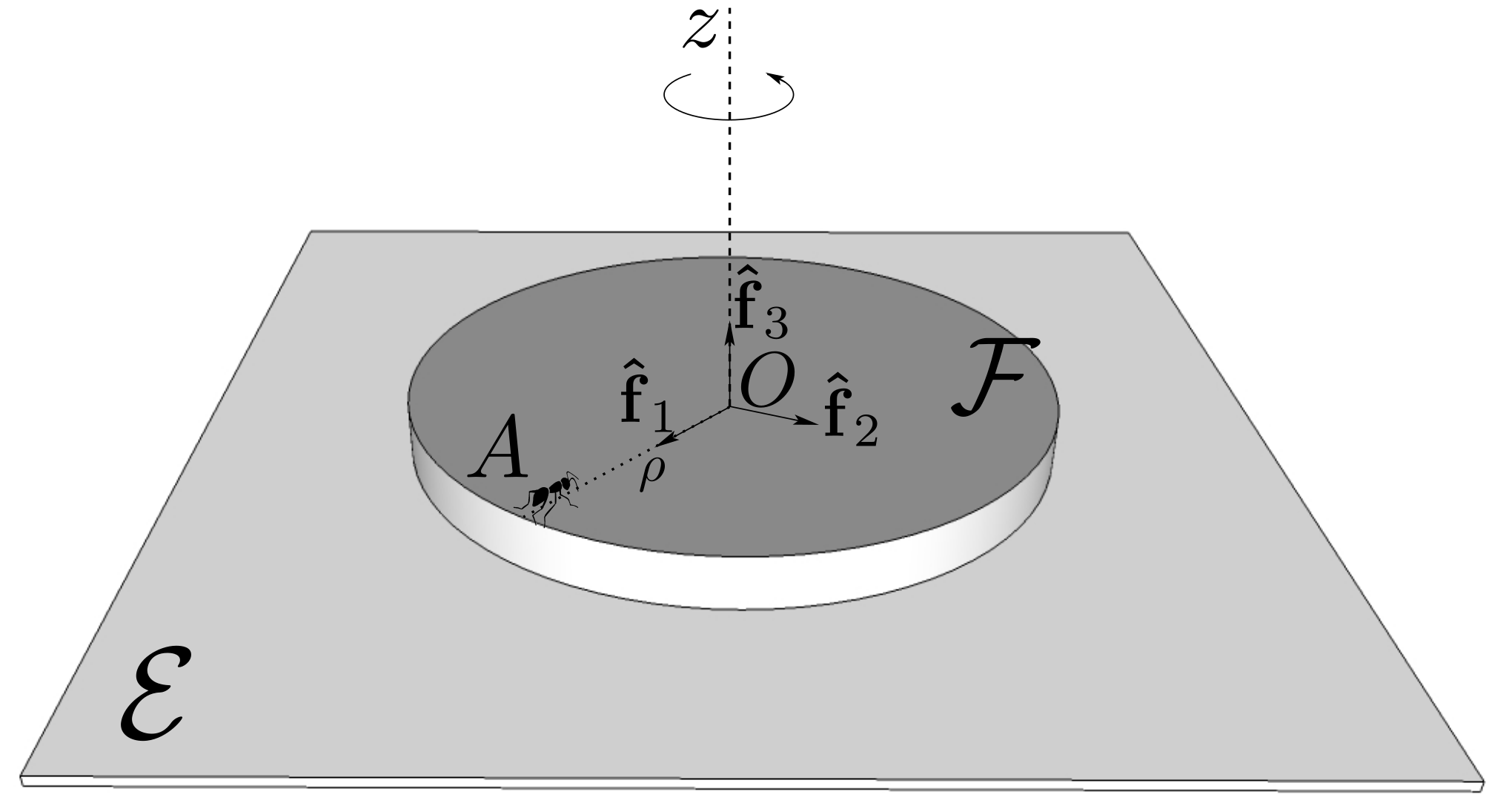
In the first example of Figure 6.1.1, consider the ant in motion relative to turntable \(\cF = (O,\bef_1,\bef_2,\bef_3)\text{.}\) Assume that \(\cF\) is in rotation about axis \((O,\bef_3)\) relative to referential \(\cE\text{.}\)
Find the “absolute” velocity and acceleration of point \(A\) from its “relative” velocity and acceleration, given that \(\br_{OA} = \rho(t) \bef_1\) where \(\bef_1\) is a unit vector attached to \(\cF\text{.}\) Assume that \(\bom_{\cF/\cE}=\om (t) \bef_3\text{.}\)
Figure6.4.2.
Solution.
The motion of \(\cF\) relative to \(\cE\) is a rotation about axis \((O, \bef_3)\text{.}\) We denote \(\bef_2 = \bef_3 \times \bef_1\text{.}\) The relative velocity and acceleration of point \(A\) are easily found to be
The transport velocity and acceleration are found by considering the coinciding point \(A(t) \in \cF\) whose motion is instantaneously that of a point in rotation with \(\cF\) about axis \((O, \bef_3)\text{:}\)
These results can be obtained much more efficiently by taking two consecutive time-derivatives of vector \(\ro (t) \bef_1\) relative to \(\cE\text{,}\) or by using the polar coordinates \((\ro, \te)\) (with \(\dte=\om\)) of \(A\text{.}\)
Example6.4.3.
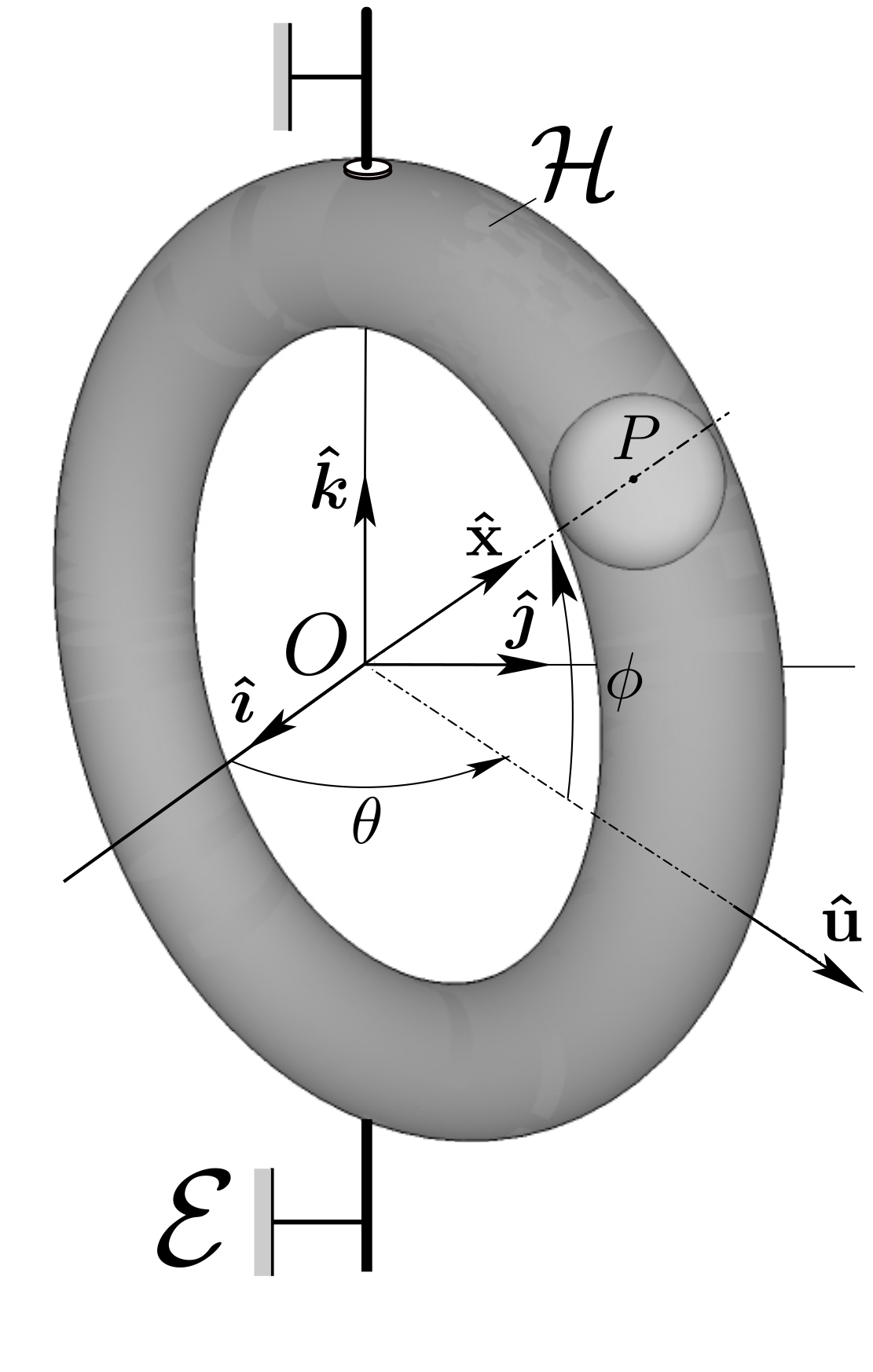
A hoop \(\cH (O, \bu, \bv, \bk)\) of center \(O\) is in rotation about axis \((O, \bk)\) of referential \(\cE (O, \bi ,\bj , \bk)\text{.}\) Its orientation is defined by angle \(\te = (\bi , \bu) = (\bj , \bv)\text{.}\) A sphere of center \(P\) can move within the interior of \(\cH\text{.}\) Its position is defined by angle \(\phi = (\bu , \bx)\text{.}\) Denote by \(R\) the distance \(|OP|\) and by \(\bx\) the unit vector along line \(OP\text{.}\) See Figure 6.4.4.
Figure6.4.4.
Find the velocity and acceleration of \(P\) relative to \(\cH\text{.}\)
Deduce the expressions of \(\vel_{P/\cE}\) and \(\ba_{P/\cE}\) from the previously found quantities, that is, by using the change of referential formulas (6.2.1) and (6.3.2).
Solution.
First we determine the kinematics of point \(P\) relative to \(\cH
(O, \bu, \bv, \bk)\) (with \(\bv = \bk\times \bu\)) by the “direct” method of taking the time-derivative (relative to \(\cH\)) of position vector \(\br_{OP} = R \bx\) (define unit vectors \(\bx\) along line \(OP\) and \(\bz = \bx\times \bv\)):
The transport velocity and acceleration are the velocity and acceleration of the coinciding point \(P(t) \in \cH\) whose motion is instantaneously that of a point rotating with \(\cH\) about axis \((O, \bk)\) relative to \(\cE\text{:}\)
The last results can be obtained (more efficiently) by the direct approach which consists of taking the first and second time-derivatives of vector \(\br_{OP}\) relative to \(\cE\text{.}\)
The change of referential formulas (6.2.1)-(6.3.2) are very useful when one wishes to study the effect of Earth’s rotation on the motion of a rigid body. The following problem shows how to account for Earth’s rotation in the acceleration of a particle \(P\text{.}\)
Example6.4.5.
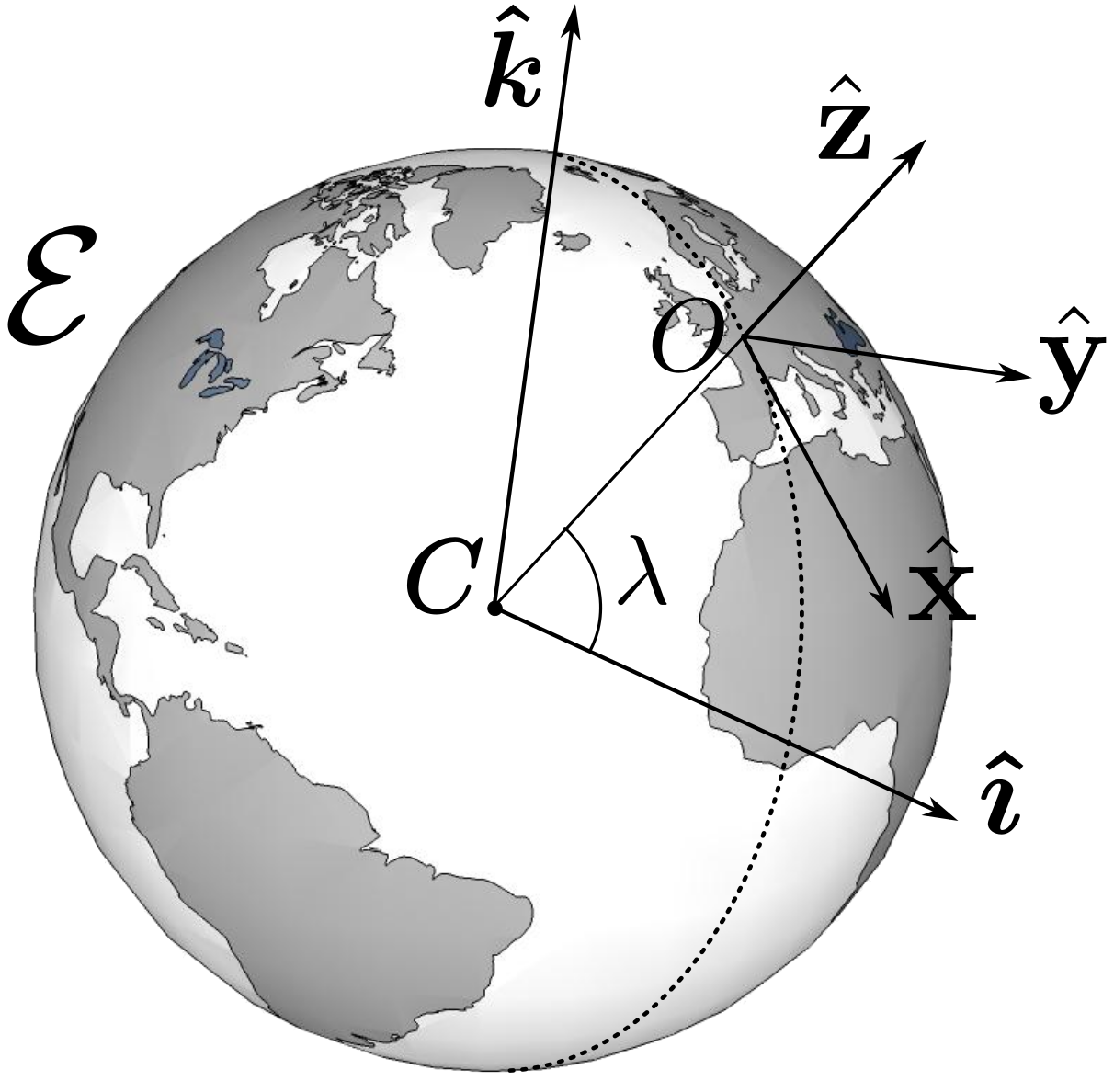
Figure 6.4.6 shows Earth \(\cE\) modeled as a rigid body of center \(C\text{.}\) To account for the rotation of Earth, we define the geocentric referential \(\cF\) of origin \(C\) with three Cartesian axes \(CX\text{,}\)\(CY\) and \(CZ\) defined as follows:
axis \(CZ\) coincides with axis \((C,\bk)\) of rotation of Earth, that is, the line joining the South pole to the North pole,
the axes \(CX\text{,}\)\(CY\) of \(\cF\) points toward ``fixed’’ stars in space.
Figure6.4.6. Hence, Earth is in rotational motion about geocentric referential \(\cF\) with angular velocity \(\bom_{\cE/\cF} = \Omega \bk\) (\(\Omega >0\) is a constant). Consider three Cartesian axes \((O,\bx)\text{,}\)\((O, \by)\text{,}\)\((O, \bz)\) attached to Earth at a particular point \(O\) (\(|OC| = R\)). Axis \((O,\bx)\) points to the South. Axis \((O,\by)\) points toward the East. Axis \((O,\bz)\) points toward the vertical at \(O\text{.}\) Point \(O\) is located at latitude \(\lambda\text{.}\) Finally, consider a particle \(P\) in motion in plane \((O,\bx, \by)\text{:}\)\(\br_{OP} = x(t) \bx + y(t) \by\) with \(x, y \ll R\text{.}\)
Find the transport acceleration \(\ba_{P\in\cE / \cF}\) of point \(P\text{.}\)
Find the Coriolis acceleration \(2 \Omega \bk\times \vel_{P/\cE}\) of point \(P\text{.}\)
Deduce the the “absolute” acceleration \(\ba_{P/\cF}\) of point \(P\) from the previous results.
Solution.
Referential \(\cE\) is in rotation about axis \((C, \bk)\) relative to referential \(\cF\text{.}\) To find transport acceleration \(\ba_{P\in\cE / \cF}\) we need to find