Section1.4Orientation of a Rigid Body: Euler Angles
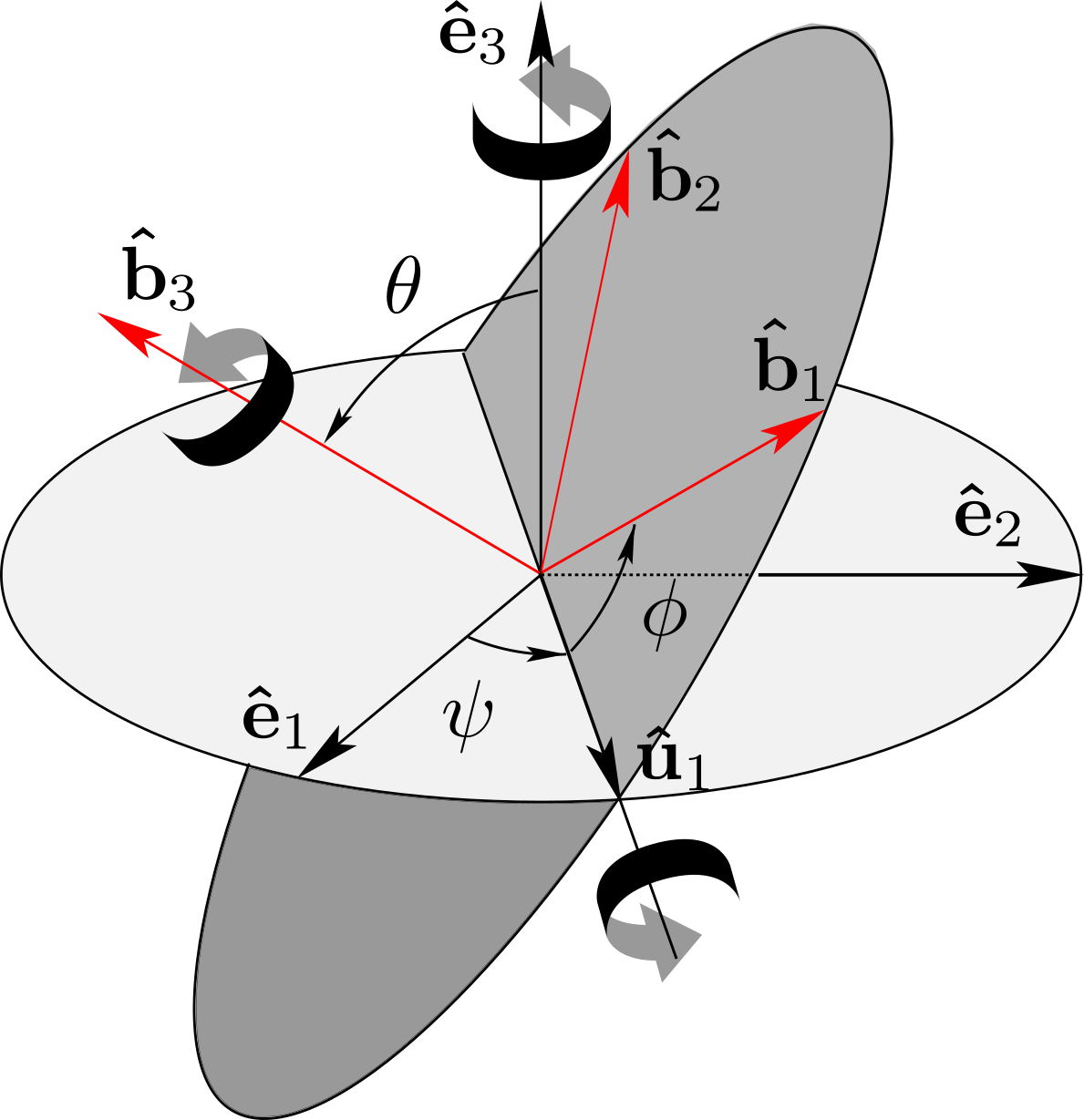
A convenient way to parametrize the orientation of basis \((\bhb_1 , \bhb_2 , \bhb_3 )\) of body \(\cB\) relative to basis \((\be_1 , \be_2 , \be_3 )\) of referential \(\cE\) is to express the rotation \(\cR_{EB}\) which maps \((\be_1 , \be_2 , \be_3 )\) to \((\bhb_1 , \bhb_2 , \bhb_3 )\) as the composition of three rotations \(\cR_{\al, \bu}\) of angle \(\alpha\) about unit vector \(\bu\text{.}\) Starting with basis \((\be_1 , \be_2 , \be_3 )\text{,}\) one obtains a second basis \((\bu_1,\bu_2, \bu_3)\) by one of three possible rotations \(\cR_{\al_i, \be_i}\) (\(i=1,2,3\)). A third basis \((\bv_1,\bv_2, \bv_3)\) is obtained by the mapping of \((\bu_1,\bu_2, \bu_3)\) by one of three possible rotations \(\cR_{\beta_i, \bu_i}\) (\(i=1,2,3\)). Finally basis \((\bhb_1 , \bhb_2 , \bhb_3 )\) is obtained by the mapping of \((\bv_1,\bv_2, \bv_3)\) by one of three possible rotations \(\cR_{\gamma_i, \bv_i}\) (\(i=1,2,3\)). Ruling out successive rotations about the same axis, one obtains twelve possible transformations known as Euler angle sequences.
Figure1.4.1.Euler Angles
One such sequence, known as the \(zxz\)-convention, is defined by considering the two planes perpendicular to \(\be_3\) and \(\bhb_3\) (represented by the two circles in Figure Figure 1.4.1. In general, these two planes intersect along the line defined by unit vector \(\bu_1\text{.}\)
Definition1.4.2.
[Euler Angles]
The three oriented angles \(\psi\) (precession angle), \(\theta\) (nutation angle) and \(\phi\) (spin angle) defined as
are known as Euler angles. The rotation \(\cR_{EB}\) which maps basis \((\be_1 , \be_2 , \be_3 )\) to basis \((\bhb_1 , \bhb_2 , \bhb_3)\) is obtained as \(\cR_ {\phi , \bhb_3} \circ \cR_{\te , \bu_1} \circ \cR_{\psi , \be_3}\text{:}\)
with \(\bu_3= \be_3\text{,}\)\(\bv_1 =\bu_1\) and \(\bhb_3=\bv_3\text{.}\)
Remark1.4.3.
Here the notation \(\te = (\bu , \bv)\) stands for oriented angle \(\te\text{,}\) that is, angle \(\te\) is measured positively in the sense which brings vector \(\bu\) to %vector \(\bv\text{.}\) Alternatively, the positive sense of rotation is given by according to the right-hand rule, by pointing the right hand’s thumb in the direction of \(\bu \times \bv\text{.}\)
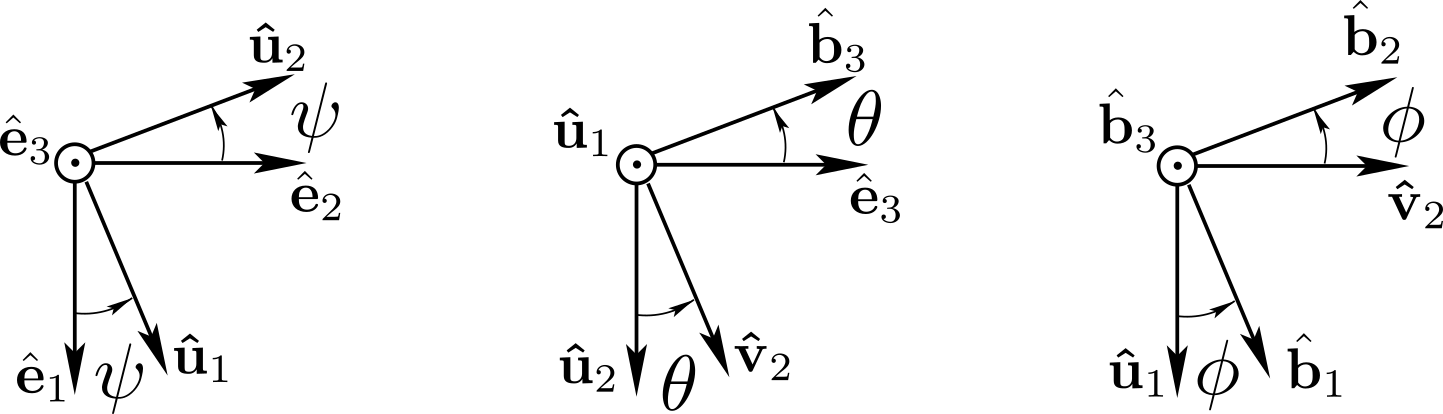
This sequence of transformations can be more clearly displayed by the following diagrams:
Figure1.4.4.Euler Angles: rotation diagrams
Special Case: Gimbal lock When the axes defined by unit vectors \(\be_3\) and \(\bhb_3\) coincide, i.e. whenever \(\bhb_3 = \pm \be_3\text{,}\) then there is an indetermination in the definition of unit vector \(\bu_1\) and angles \(\psi\) and \(\phi\text{.}\) One can choose any unit vector \(\bu_1\) perpendicular to \(\be_3\text{.}\) Then if \(\bhb_3 = \be_3\text{,}\) angle \(\te\) is equal to zero, the angles \(\psi\) and \(\phi\) must satisfy \((\be_1 , \bhb_1 ) = \psi+ \phi\text{,}\) but cannot be specified uniquely (if \(\bhb_3 = -\be_3\text{,}\) then \(\te = \pi\) and \((\be_1 , \bhb_1 ) = \psi- \phi\)). Due to this indetermination, Euler angles are precluded in certain applications, such as in satellite attitude dynamics.
Direction Cosine Matrix. The direction cosines of basis \((\bhb_1 , \bhb_2 , \bhb_3 )\) on basis \((\be_1 , \be_2 , \be_3 )\) can easily be found in terms of Euler angles by expressing each vector \(\bhb_j\) on basis \((\be_1 , \be_2 , \be_3 )\text{:}\)
Recall that matrix \(\begin{bmatrix}\cC_{EB}\end{bmatrix} =
\begin{bmatrix}\cC_{EU}\end{bmatrix}
\begin{bmatrix}\cC_{UV}\end{bmatrix}
\begin{bmatrix}\cC_{VB}\end{bmatrix} \) represents the rotation \(\cR_{EB}= \cR_ {\phi , \bhb_3} \circ \cR_{\te , \bu_1} \circ\cR_{\psi , \be_3}\) on basis \((\bhb_1 , \bhb_2 , \bhb_3 )\) or basis \((\be_1 , \be_2 , \be_3 )\text{.}\) It can be shown that this matrix only depends on the sum \(\psi+\phi\) for \(\theta = 0\text{.}\) Hence, the mapping \((\psi,\te,\phi) \to \begin{bmatrix}\cC_{EB}\end{bmatrix}\) is singular for \(\te=0\) (or \(\theta=\pi\)).
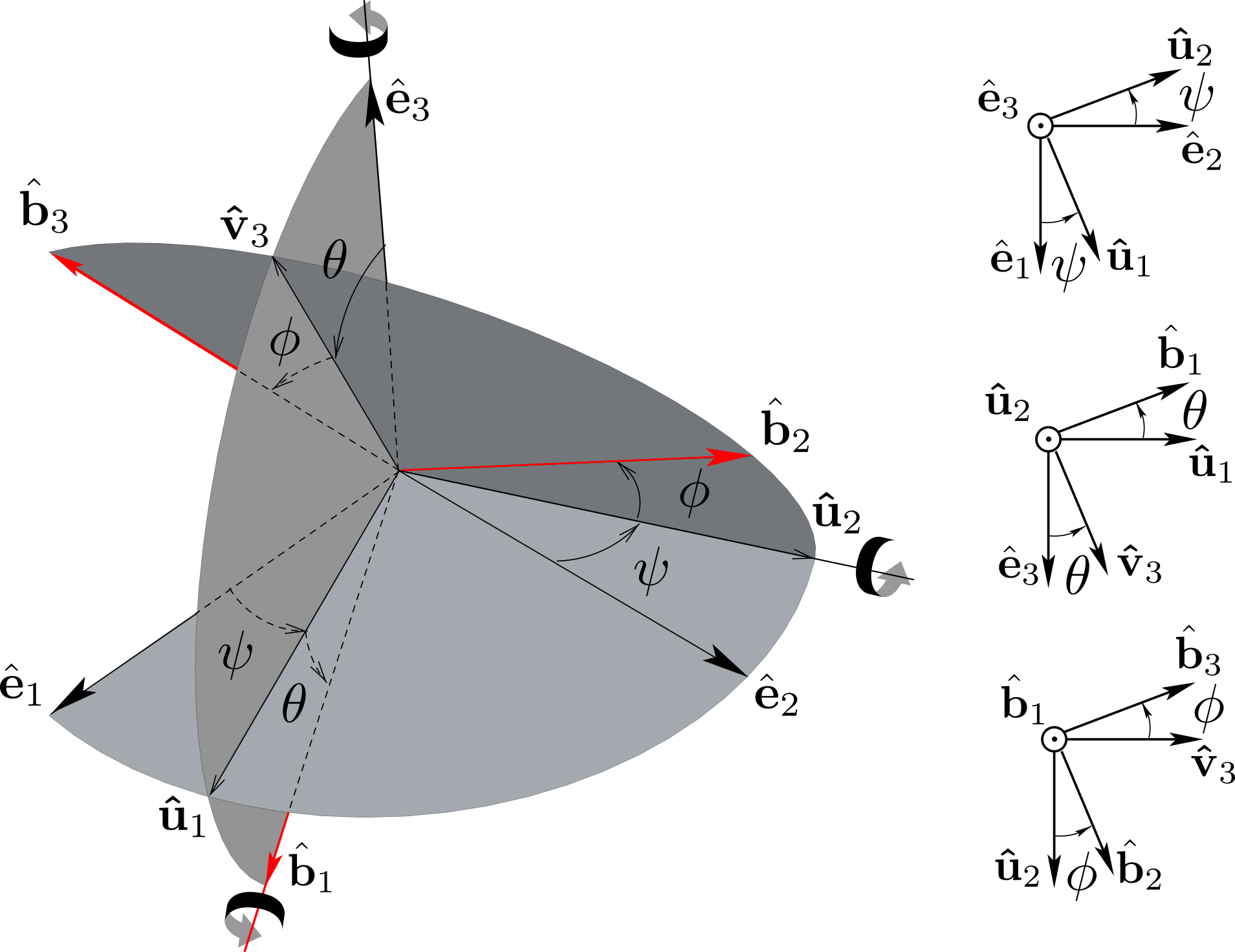
Bryant (Cardan) Angles. Whenever the referential \(\cE\) is attached to Earth with \(\be_3\) directed along the vertical upward, Euler angles of the \(zxz\)-convention are inadequate in applications (such as in aerospace engineering) for which angle \(\theta\) crosses the values \(\theta =0\) or \(\theta = \pi\) (in which case \(\bhb_3\) is also directed along the vertical). These angles can be replaced by the angles \(\psi\text{,}\)\(\theta\) and \(\phi\) defined as follows:
This sequence is referred to as the \(zyx\)-convention, or the yaw-pitch-roll convention. The corresponding angles are referred to as Bryant (or Cardan) angles. See Figure Figure 1.4.5. The rotation matrix \([\cR_{EB}]_E =[\cR_{EB}]_B = [\cC_{EB}]\) takes the expression
The angles \(\psi\) and \(\phi\) are indeterminate for the configurations \(\theta = \pm \pi/2\text{.}\)
In conclusion, Euler sequences provide a simple geometric method to describe the orientation of a rigid body. They have however the disadvantage of leading to geometric singularities at specific configurations, in turn giving rise to kinematic singularities. If the orientation of the body does not pass through such configurations, the method is perfectly adequate. Otherwise, another method must be adopted.