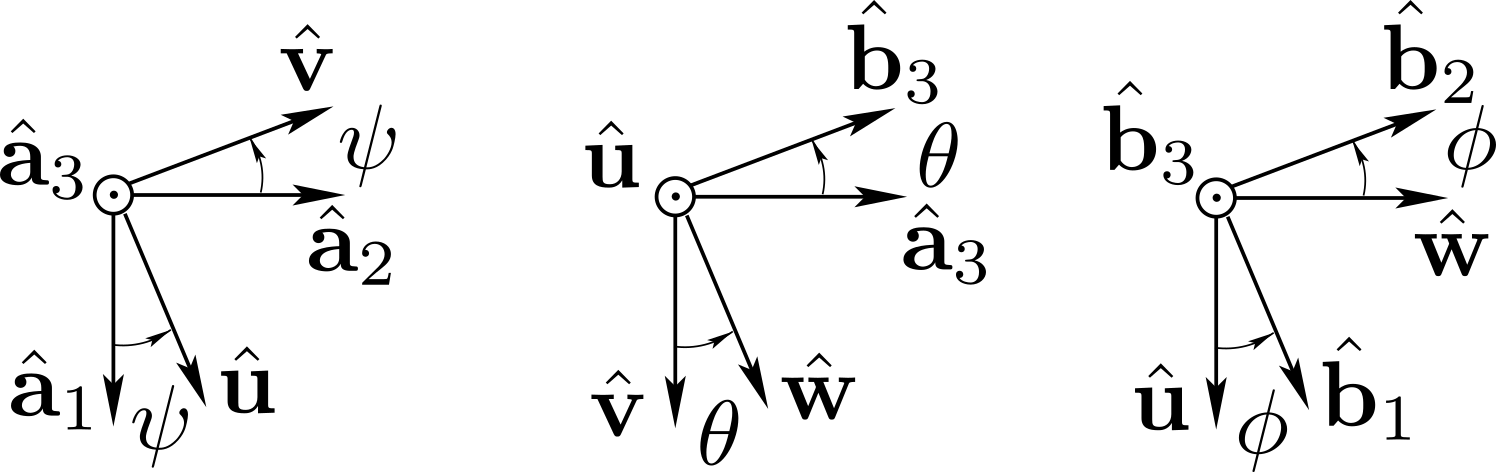
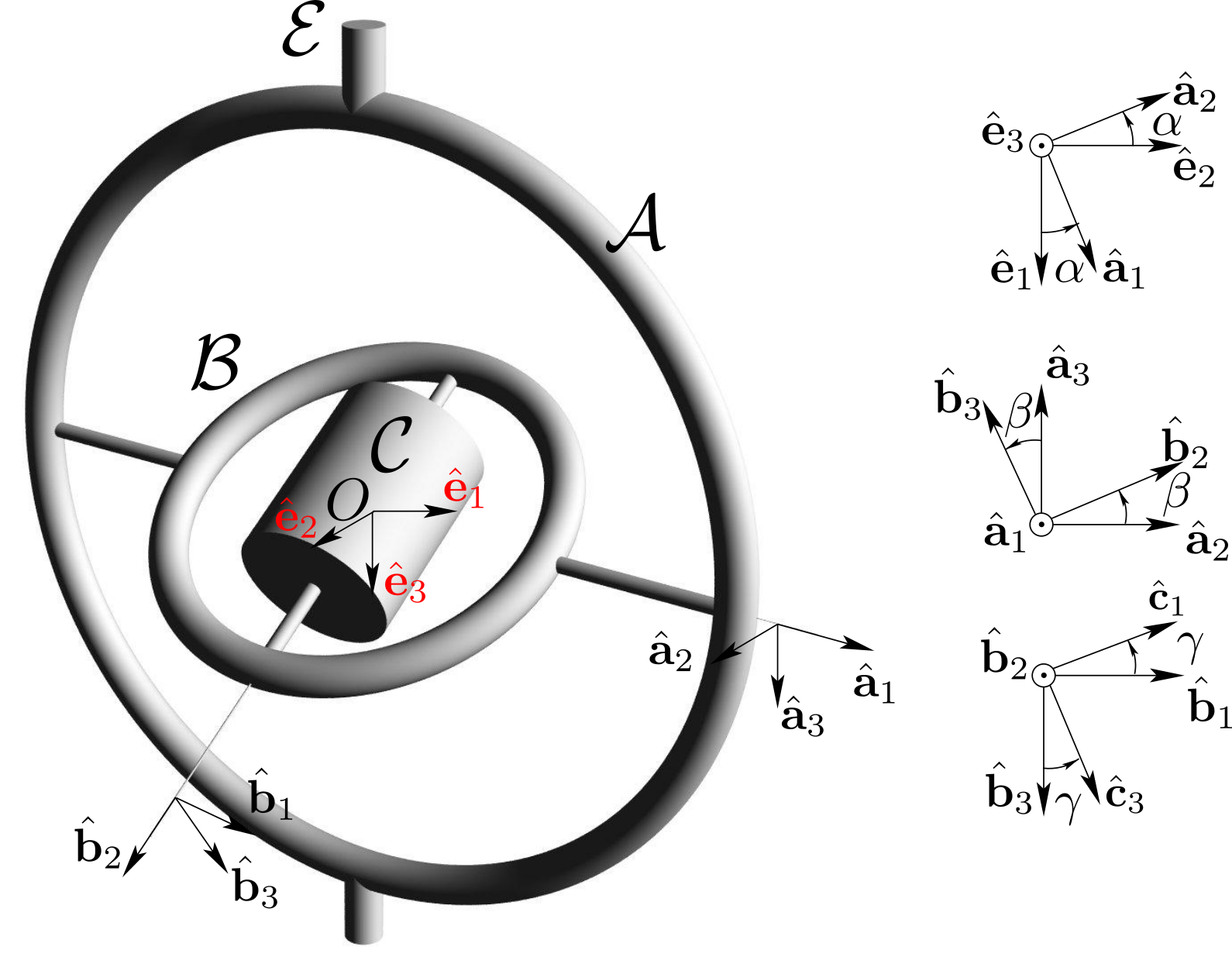
The sequence of transformations which maps basis \((\be_1 , \be_2 , \be_3 )\) of \(\cE\) into basis \((\bhb_1 , \bhb_2 , \bhb_3 )\) of \(\cB\) leads to
\begin{equation*}
\bom_{\cB / \cE} =\dpsi \be_3 + \dte \bu_1 + \dphi \bhb_3
\end{equation*}
We can resolve \(\bom_{\cB / \cE}\) on basis \((\bhb_1 , \bhb_2 , \bhb_3 )\) to obtain \((p,q,r)\)
\begin{align*}
p \amp = \dpsi \sin\te\sin\phi + \dte \cos\phi \\
q \amp = \dpsi \sin\te\cos\phi - \dte \sin\phi \\
r \amp = \dpsi \cos\te + \dphi
\end{align*}
We can then express \((\dpsi, \dte, \dphi)\) in terms of \((p,q,r)\)
\begin{align*}
\dpsi \amp = (p \sin\phi + q \cos\phi)/ \sin\te \\
\dte \amp = {p \cos\phi - q \sin\phi} \\
\dphi \amp = r - \cot\te (p \sin\phi + q \cos\phi)
\end{align*}
To differentiate
\(\bhb_1\text{,}\) we apply formula
(3.1.3) (recall that
\(\bhb_1\) is attached to
\(\cB\text{.}\)
\begin{align*}
\left( {d \bhb_1 \over dt } \right)_{\cE} \amp =
\left( {d \bhb_1 \over dt } \right)_{\cB}
+ \bom_{\cB/ \cE} \times \bhb_1
= ( \dpsi \be_3 + \dte \bu_1 + \dphi \bhb_3 ) \times \bhb_1 \\
= \amp \dpsi (\cos\te \bhb_2 -\sin\te\cos\phi \bhb_3)
+ \dte \sin\phi \bhb_3 + \dphi \bhb_2
\end{align*}
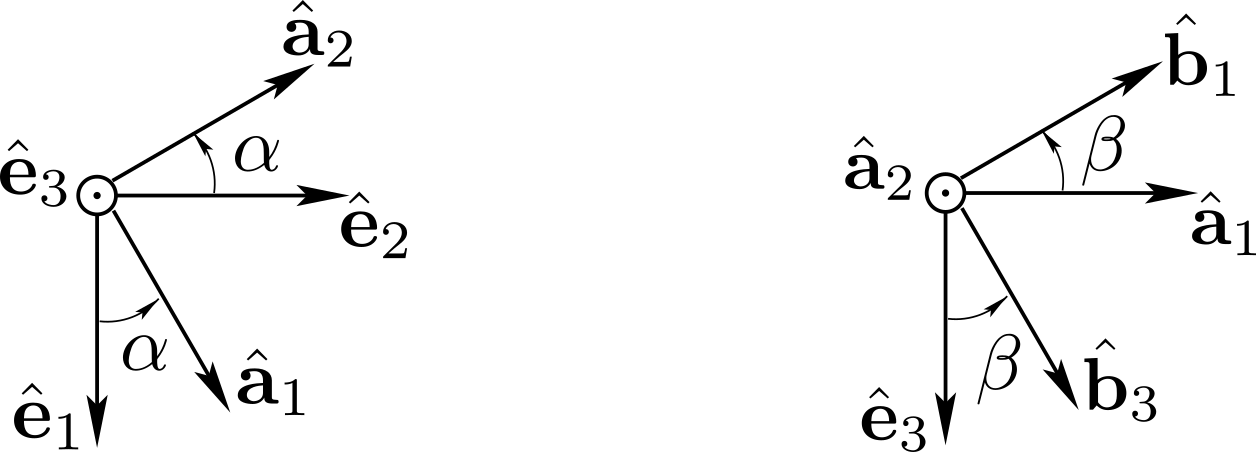
where we have found the following cross-products from the rotation diagrams displayed above
\begin{equation*}
\be_3 \times \bhb_1 = \cos\te \bhb_2 -\sin\te \cos\phi \bhb_3,
\quad \bu_1 \times \bhb_1 = \sin\phi \bhb_3, \quad \bhb_3 \times \bhb_1 =
\bhb_2
\end{equation*}
Regroup likewise terms to obtain
\begin{equation*}
\left( {d \bhb_1 \over dt } \right)_{\cE}
=
(\dpsi \cos\te + \dphi) \bhb_2
+ (\dte \sin\phi - \dpsi \sin\te\cos\phi) \bhb_3
\end{equation*}
Note that since \(\bhb_1\) is a unit vector, its derivative is normal to itself. The reader will verify the following results
\begin{equation*}
\left( {d \bhb_2 \over dt } \right)_{\cE} =
- (\dpsi \cos\te + \dphi) \bhb_1
+ (\dte \cos\phi + \dpsi \sin\te\sin\phi) \bhb_3
\end{equation*}
(which can be found from the derivative of \(\bhb_1\) by changing \(\phi\) to \(\phi + \pi/2\)),
\begin{equation*}
\left( {d \bhb_3 \over dt } \right)_{\cE} =
\dpsi \sin\te \bu_1 + \dte \bv_2
\end{equation*}
Note the singularity at
\(\te =0\) and
\(\te= \pi\) in the expression
\(\dpsi = (p \sin\phi + q \cos\phi)/\sin\te\text{,}\) consistent with the indetermination of Euler angles described in
Section 1.4.