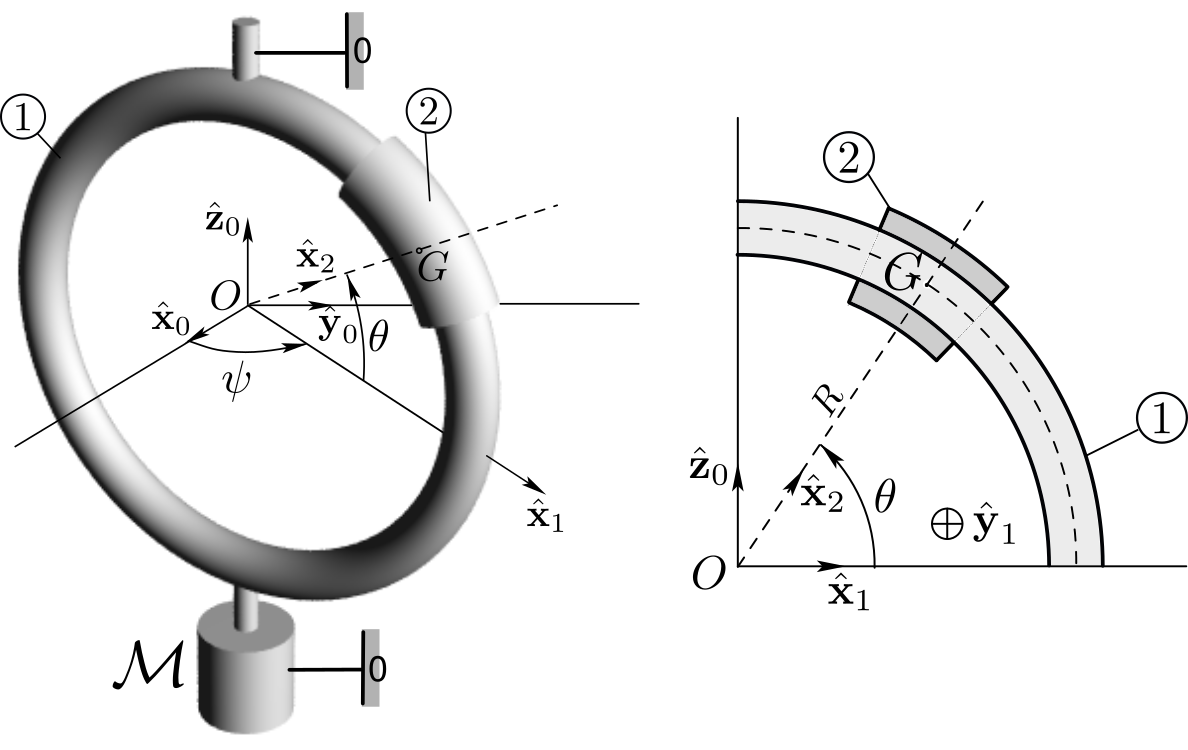
a. The position of system \(\Si\) is parametrized by angle \(\theta\) and time \(t\text{.}\) The kinematic screws of bodies 1 and 2 are written as
\begin{equation*}
\{ \cV_{1/0} \} = \{ \cV^t_{1/0} \} = \begin{Bmatrix} \Om\bz_0\\\\ \bze \end{Bmatrix}_O,
\end{equation*}
\begin{equation*}
\{ \cV_{2/0} \} = \dte \{ \cV^\te_{2/0} \} + \{ \cV^t_{2/0} \} = \dte \begin{Bmatrix} -\by_1 \\\\ \bze \end{Bmatrix}_O
+ \begin{Bmatrix} \Om\bz_0\\\\ \bze \end{Bmatrix}_O
\end{equation*}
where we have used \(\bom_{2/0}= \Om \bz_0 - \dte \by_1\) and \(\vel_{O\in 2/0} = \bze\text{.}\) The kinetic energy of the system is found as follows
\begin{align*}
\kin_{\Si/0} \amp = \kin_{\Si/0}^{(0)}+\kin_{\Si/0}^{(1)}+ \kin_{\Si/0}^{(2)} =
\half I_1 \Om^2 + \half \bom_{2/0}\cdot \cI_{O,2} (\bom_{2/0})\\
\amp = \half I_1 \Om^2 +
\half\begin{bmatrix}\Om \sin\te \\ -\dte \\ \Om \cos\te \end{bmatrix}\cdot
\begin{bmatrix}A_2 \amp 0 \amp 0 \\0 \amp B_2 +mR^2 \amp 0\\0 \amp 0 \amp C_2+mR^2 \end{bmatrix}_{b_2}
\begin{bmatrix} \Om \sin\te \\ -\dte \\ \Om \cos\te \end{bmatrix}\\
\amp = \half I_1 \Om^2 + \half A_2 \Om^2 \sin^2\te + \half (B_2 +mR^2) \dte^2 + \half (C_2+ mR^2) \Om^2 \cos^2 \te
\end{align*}
where \([\cI_{O,2}]_{b_2}\) is obtained from \([\cI_{G, 2}]_{b_2}\) by using the Parallel Axis theorem. This leads to the expression of \(\kin_{\Si/0}^{(0)}\text{,}\) \(\kin_{\Si/0}^{(1)}\) and \(\kin_{\Si/0}^{(2)}\text{:}\)
\begin{equation*}
\kin_{\Si/0}^{(0)} = \half I_1 \Om^2+ \half A_2 \Om^2 \sin^2\te +\half (C_2+ mR^2) \Om^2 \cos^2 \te,
\end{equation*}
\begin{equation*}
\kin_{\Si/0}^{(1)} =0
\end{equation*}
\begin{equation*}
\kin_{\Si/0}^{(2)} = \half (B_2 +mR^2) \dte^2
\end{equation*}
Painlevé equation applied to system \(\Sigma\) can be written as
\begin{equation*}
\frac{d}{dt}(\kin^{(2)}_{\Si/0} -\kin^{(0)}_{\Si/0} )+ \frac{\partial}{\partial t}\kin_{\Si/0}
=
\dte \qQ^{\te}_{\bSi\to \Si/0} + \dte \qQ^\te_{1 \leftrightarrow 2} \tag{1}
\end{equation*}
with
\begin{equation*}
\qQ^{\te}_{\bSi\to \Si/0} =\underbrace{\qQ^{\te}_{\bSi\to 1/0}}_{0} +
\qQ^{\te}_{\bSi\to 2/0} = -\frac{\partial \pot}{\partial \te}= - mg R \cos\te
\end{equation*}
using the gravitational potential \(\pot = mgR \sin\te\text{,}\) and
\begin{equation*}
\qQ^\te_{1 \leftrightarrow 2} = \{ \cV^\te_{2/1} \} \cdot \{\cA^c_{1\to 2}\}
= -\by_1 \cdot \bM^c_{O, 1\to 2} =0
\end{equation*}
The last result is a consequence of the fact that the joint between bodies 1 and 2 is ideal. Since the kinetic energy is not an explicit function of time, we find
\begin{equation*}
\frac{\partial}{\partial t}\kin_{\Si/0} =0
\end{equation*}
Finally equation (1) becomes
\begin{equation*}
\frac{d}{dt}(\kin^{(2)}_{\Si/0} -\kin^{(0)}_{\Si/0} ) = -\dte \frac{\partial\pot}{\partial \te} = -\frac{d\pot}{dt}
\end{equation*}
This leads to Painlevé first integral
\begin{equation*}
\kin^{(2)}_{\Si/0} -\kin^{(0)}_{\Si/0} + \pot = Cst
\end{equation*}
or
\begin{equation*}
(B_2 +mR^2) \dte^2 - \Big(I_1 + A_2 \sin^2\te + (C_2+ mR^2) \cos^2 \te \Big)\Om^2
+ 2mgR \sin\te = Cst \tag{2}
\end{equation*}
b. We can apply Lagrange equations to system \(\Si\) w.r.t. variables \((\psi, \te)\text{:}\) we then assume that the variables \((\psi,\te, \dpsi,\dte)\) are independent and must ignore the relationship \(\psi=\Om t\text{.}\) Now the kinetic energy of the system takes the expression
\begin{equation*}
\kin_{\Si/0} =
\half \Big(I_1 + A_2 \sin^2\te +(C_2+ mR^2) \cos^2 \te\Big) \dpsi^2 + \half (B_2 +mR^2) \dte^2
\end{equation*}
Lagrange equation \(\cL_{\Si/0}^\psi\) is given by
\begin{equation*}
\frac{d}{dt} \Big( \big(I_1 + A_2 \sin^2\te +(C_2+ mR^2) \cos^2 \te \big) \dpsi \Big)
=
\qQ^\psi_{\bSi \to\Si /0} + \qQ^\psi_{1 \leftrightarrow 2}
\end{equation*}
with
\begin{equation*}
\qQ^\psi_{\bSi \to\Si /0} = \cC, \qquad \qQ^\psi_{1 \leftrightarrow 2} =0
\end{equation*}
This equation becomes:
\begin{equation*}
\cL_{\Si/0}^\psi: \qquad \frac{d}{dt} \Big( \big(I_1 + A_2 \sin^2\te +(C_2+ mR^2) \cos^2 \te \big) \dpsi \Big) =\cC
\tag{3}
\end{equation*}
Similarly, Lagrange equation \(\cL_{\Si/0}^\te\) is given by
\begin{equation*}
(B_2 +mR^2) \ddte - \Big(A_2 \sin\te\cos\te -(C_2+ mR^2) \cos\te\sin\te \Big) \dpsi^2
= \qQ^\te_{\bSi \to\Si /0} + \qQ^\te_{1 \leftrightarrow 2}
\end{equation*}
with
\begin{equation*}
\qQ^\te_{\bSi \to\Si /0} = - mg R \cos\te , \qquad \qQ^\te_{1 \leftrightarrow 2} =0
\end{equation*}
giving
\begin{equation*}
\cL_{\Si/0}^\te: \;\; (B_2 +mR^2) \ddte - \Om^2 (A_2-C_2-mR^2)\sin\te\cos\te =- mg R \cos\te
\tag{4}
\end{equation*}
after substitution of \(\dpsi = \Om\text{.}\) It is easy to show that (4) can be obtained by taking the time-derivative of (2).