Before stating the Principle of Virtual Power for arbitrary material systems, we first consider the case of systems of particles. The motion of each particle is assumed to be governed by Newton’s laws which can be stated as follows:
Newton First Law: There exists at least one referential \(\cE\text{,}\) referred to as Newtonian}, relative to which any particle \(P\) is either at rest or in uniform rectilinear motion in the absence of unbalanced forces acting on \(P\text{.}\)
Newton Second Law: Relative a Newtonian referential \(\cE\text{,}\) the acceleration of a particle \(P\) is proportional to the resultant force \(\bF\) exerted on \(P\text{,}\) and inversely proportional to the mass \(m\) of \(P\text{.}\)
Newton Third law: For every action, there is an equal and opposite reaction. More specifically, if \(\bF_{1\to 2}\) is the force exerted by particle \(P_1\) on particle \(P_2\text{,}\) then particle \(P_2\) exerts a force \(\bF_{2\to 1}\) opposed to \(\bF_{1\to 2}\) and collinear to the line joining \(P_1\) and \(P_2\) (Principle of action and reaction).
We first derive Principle of Virtual Power. This principle states that the virtual powers of all internal, external and inertial forces acting on a system of particles is equal to zero. A special form of this principle can be obtained by choosing the virtual velocity field in a special class which causes the virtual power of internal forces to vanish.
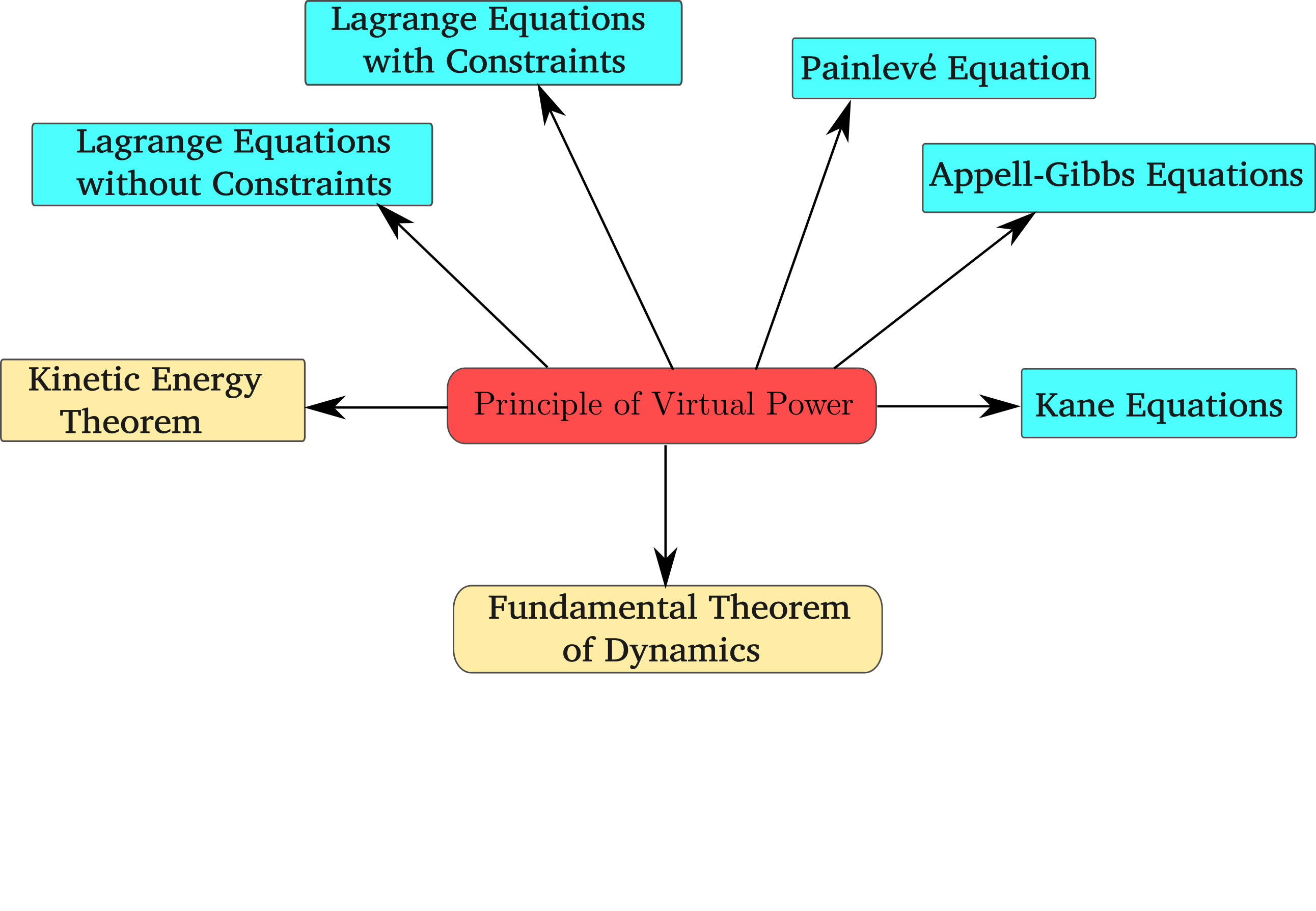
We then state the generalization of this principle to arbitrary material systems from which all theorems of dynamics can be proven, as shown in Figure 11.1.1. This includes the Fundamental Theorem of Dynamics central to this chapter, and other methods introduced in subsequent chapters. This theorem is very general: it is applicable to all material systems, deformable or not, whose mass is conserved. Hence, it can be applied to systems of rigid bodies.
Figure11.1.1.The methods and theorems of rigid body dynamics which can be derived from the application of the Principle of Virtual Power
Subsection11.1.1Preliminaries: System of Particles
Consider a system \(\Si\) of \(N\) particles \(P_1, P_2, \ldots, P_N\) of mass \(m_1
, m_2, \ldots , m_N\text{.}\) Newton’s second law states that the motion of each particle can be predicted relative to a Newtonian referential \(\cE\) according to the equation
where the force \(\bF_i\) exerted on \(P_i\) can be written as the sum \(\bF_{\bSi \to i}+ \sum_j \bF_{j \to i}\) of an external force \(\bF_{\bSi \to i}\) and internal forces \(\bF_{j \to i}\) caused by the particles of the system. Consider now a vector field \(\vv_P\) defined over \(\cE\text{.}\) We then multiply equation (11.1.1) by \(\vv_{P_i}\) and sum over the set of particles to obtain
The arbitrary vector field \(P \mapsto \vv_P\) is referred to as a virtual velocity field. Each term of (11.1.2) is referred to as a virtual power. Conversely, if equation (11.1.2) holds for all vector fields \(\vv_P\text{,}\) then equation (11.1.1) is obtained for \(i=1, \ldots, N\text{.}\)
We then ask whether particular virtual velocity fields can be found so as to cancel out the virtual power of all internal forces}. First, we can simplify this power by taking into account Newton third law \(\bF_{j \to i}+ \bF_{i \to j}= \bze\text{:}\)
The goal is then to find a field \(P \mapsto \vv_P\) such that every term \((\vv_{P_j}-\vv_{P_i}) \cdot\bF_{i \to j}\) drops out. Recall that force \(\bF_{i \to j}\) is collinear to position vector \(\br_{P_i P_j}\text{.}\) Hence we obtain \((\vv_{P_j}-\vv_{P_i}) \cdot\bF_{i \to j} = 0\) if vector \((\vv_{P_j}-\vv_{P_i})\) is normal to vector \(\br_{P_iP_j}\) for all possible position of particles \(P_i\) and \(P_j\text{.}\) This is in fact the property satisfied by equiprojective vector fields, that is, vector fields satisfying \(\vv_Q = \vv_P + \bV^* \times \br_{PQ}\) at any two points \(P\) and \(Q\text{:}\) field \(P \mapsto \vv_P\) defines a screw \(\{\cV^*\}\text{.}\) We refer to such fields as rigidifying virtual velocity fields, since they can be viewed as the velocity fields of virtual rigid bodies. We conclude with the following result:
Theorem11.1.2.Principle of Virtual Power.
At any given time, the virtual power of external and inertial forces acting on system \(\Si\) relative to a Newtonian referential \(\cE\) vanishes:
\begin{equation}
\underbrace{\quad\sum_{i=1}^N \quad \vv_{P_i} \cdot\bF_{\bSi \to i} \quad}
_{\text{virtual power of external forces}}
+
\underbrace{\quad \sum_{i=1}^N \quad \vv_{P_i} \cdot (-m_i \ba_{P_i / \cE} ) \quad}
_{\text{virtual power of inertial forces}}
= 0 \tag{11.1.3}
\end{equation}
for all rigidifying virtual velocities fields \(\vv\text{,}\) that is, satisfying \(\vv_Q = \vv_P + \bV^* \times \br_{PQ}\text{.}\)
Subsection11.1.2Generalization to Arbitrary Material Systems
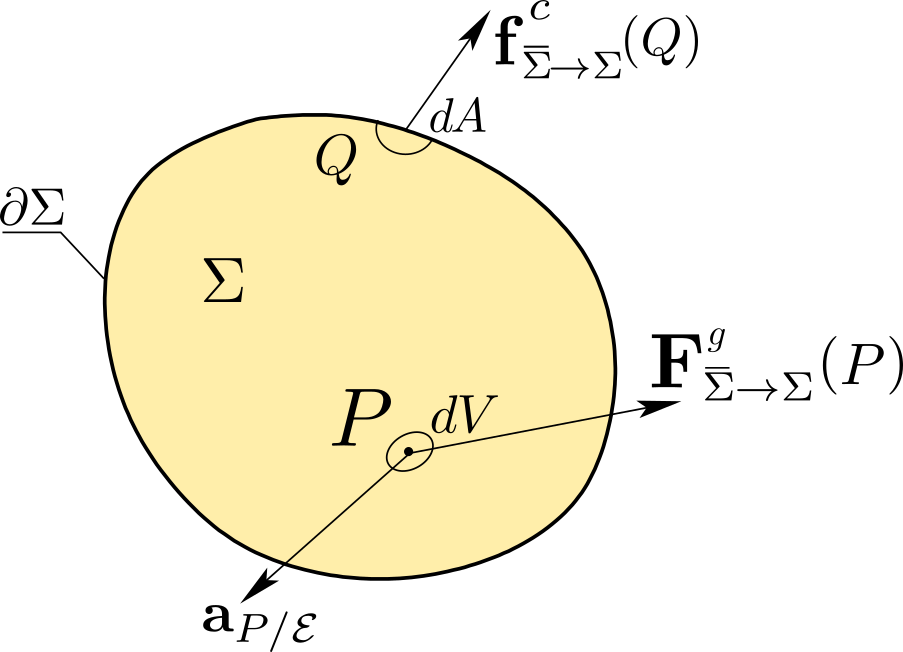
We now generalize the Principle of Virtual Power for arbitrary material system \(\Sigma\) of constant mass, in motion under the action of external gravitational forces \(\bF_{ \bSi \to \Si}^g (P)\) (\(P\in\Sigma\)) (other action-at-a-distance forces could be included) and contact forces \(\bof_{ \bSi \to \Si}^c (Q)\) (\(Q \in \pSi\)). See Figure 11.1.4.
The principle can be stated as follows:
Theorem11.1.3.Principle of virtual power.
There exists at least one referential \(\cE\text{,}\) referred to as a Newtonian referential, such that, for any material system \(\Sigma\) of constant mass, the virtual power of all external (gravitational and contact) forces and inertial forces acting on system \(\Si\) relative to \(\cE\) is equal to zero at all time:
Recall from Subsection 11.1.1 that the “rigidifying” assumption of virtual velocity fields is fundamental to eliminate the contribution of internal forces. In continuum mechanics, this assumption is removed: arbitrary virtual velocity fields are considered in (11.1.5) and the internal forces (stresses) are taken into account.
Remark11.1.6.
The theorems of dynamics which will be presented in this and the following chapters will be derived by choosing particular rigidifying virtual velocity fields (screws) in (11.1.5).
Subsection11.1.3Corollary: action and reaction screws
The following properties can be proved from the Principle of Virtual Power:
Given two interacting disjoint material systems of constant mass \(\Si_1\) and \(\Si_2\text{,}\) i.e. such that \(\Si_1 \cap \Si_2 = \emptyset\text{,}\) then