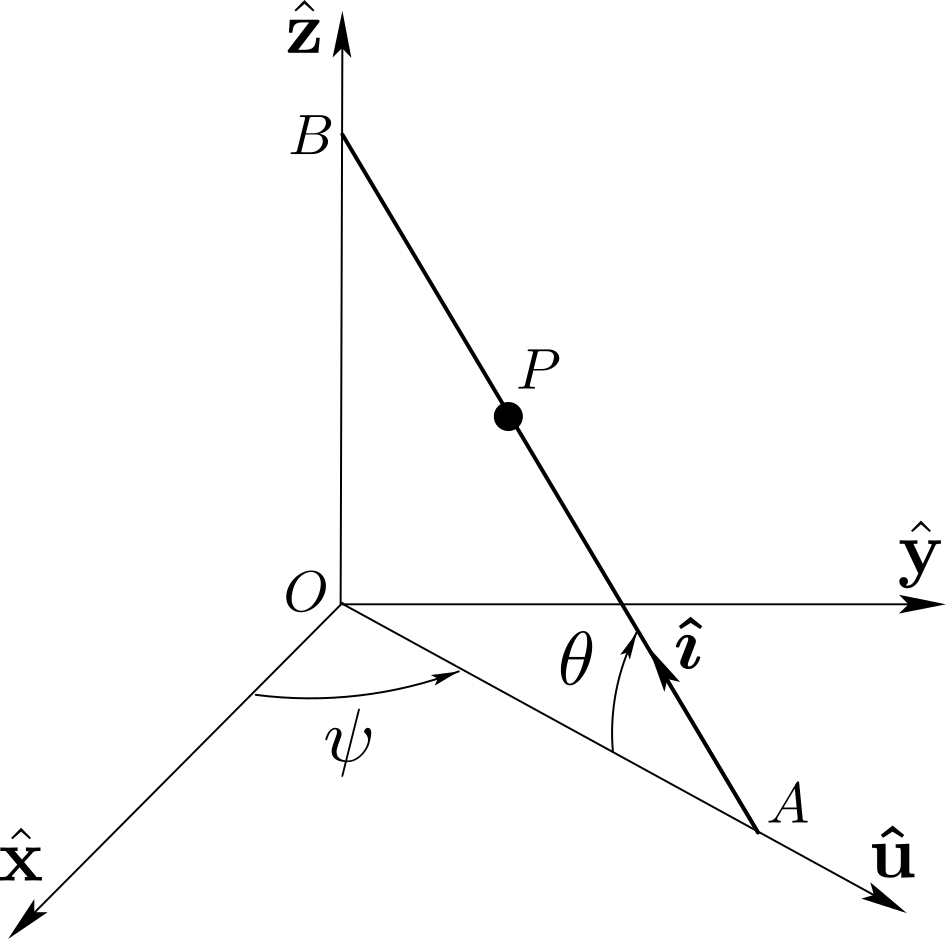
A slender rod \(\cG\) is in motion relative to a referential \(\cE (O, \bx, \by , \bz)\) in the following way:
its endpoints \(A\) and \(B\) move in a vertical plane \((O, \bu , \bz)\) which rotates relative to \(\cE\) about vertical axis \((O, \bz)\) with angular velocity \(\dpsi \bz\text{,}\)
point \(B\) slides along axis \((O, \bz)\) while point \(A\) slides along axis \((O, \bu)\text{.}\)
The orientation of rod \(\cG\) relative to referential \(\cF (O, \bu , \bv = \bz\times\bu, \bz)\) is defined by angle \(\theta (t)\) as shown. A small ring \(P\) slides along line \(AB\) in such a way that \(\br_{PB} = \rho (t) \bi\text{.}\) Denote \(\bj = \bv\times \bi\) and \(L = |AB|\text{.}\)
Find velocity \(\vel_{P/\cF}\) from the expression of velocity \(\vel_{P/\cG}\text{.}\) Then find \(\vel_{P/\cE}\) from the expression of \(\vel_{P/\cF}\text{.}\)
Repeat for acceleration of \(P\text{:}\) find \(\ba_{P/\cF}\) from \(\ba_{P/\cG}\text{,}\) then find \(\ba_{P/\cE}\) from \(\ba_{P/\cF}\text{.}\)
Figure6.7.1.
Solution.
First we find \(\vel_{P/\cG} = \frac{d}{dt} \br_{BP} \Big|_{\cG}= - \dro \bi\) since both \(A\) and unit vectors are attached to \(\cG\text{.}\)
We then find \(\vel_{P/\cF}\) from \(\vel_{P/\cG}\) by using
Likewise to find \(\vel_{P/\cE}\) from \(\vel_{P/\cF}\text{,}\) we need transport velocity \(\vel_{P \in \cF/ \cE}\text{.}\) This term is found by using the expression of kinematic screw \(\{ \cV_{\cF / \cE} \}\text{:}\)
We apply formula \(\ba_{P/\cF} = \ba_{P/\cG}+ \ba_{P \in\cG /\cF}+2\bom_{\cG/\cF}\times \vel_{P/\cG}\) with \(\ba_{P/\cG} = -\ddro \bi\) and transport acceleration
It is likely faster to find \(\vel_{P/\cE}\) and \(\ba_{P/\cE}\) by direct time-differentiation relative to \(\cE\text{.}\) For instance, velocity \(\vel_{P/\cE}\) is found by taking the time-derivative of \(\br_{OP}= L \sin\te \bz - \ro \bi\) relative to \(\cE\text{:}\)
with \(\bz\times \bi= -\cos\te \bv\) and \(\bv\times \bi =\bj\text{.}\) We recover the result found above.
2.
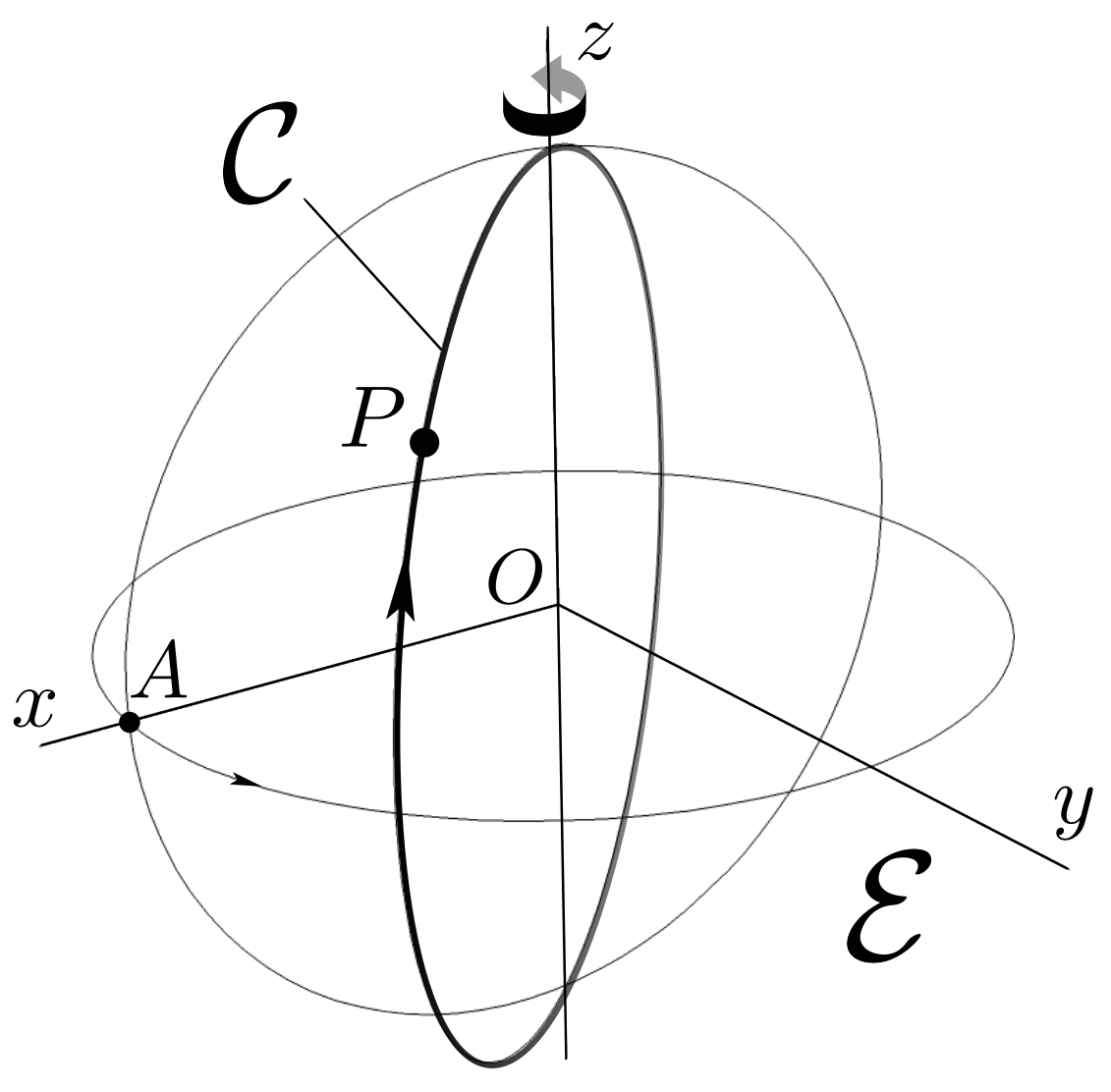
A small ring \(P\) slides along a circular frame \(\cC\) of center \(O\) and radius \(R\) at constant speed \(v\text{.}\) Frame \(\cC\) rotates about its diameter \(Oz\) at constant angular velocity \(\om \be_z\) relative to referential \(\cE\text{.}\) At time \(t=0\text{,}\)\(\cC\) lies in the plane \(Oxz\) of \(\cE\) and \(P\) is at point \(A\) on axis \(Ox\text{.}\)
Find the velocity and acceleration of \(P\) relative to \(\cC\text{.}\)
Using the previous quantities, find the velocity and acceleration of \(P\) relative to \(\cE\text{.}\)
Figure6.7.2.
3.
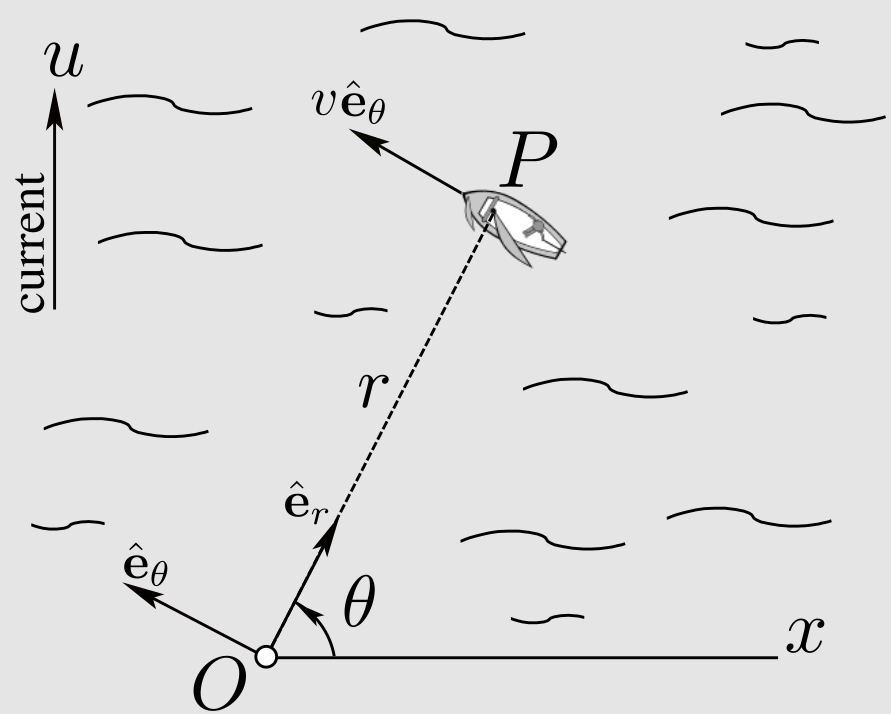
A sailboat \(P\) travels in a current so that a buoy located at a fixed point \(O\) always stays directly abeam to \(P\text{,}\) that is, the line connecting \(O\) and \(P\) stays perpendicular to the boat’s relative velocity. The boat’s speed in still water is the constant \(v\text{.}\) The current has a constant velocity \(\bf u\) (relative to the ground). Denote by \(\be_r\) the unit vector directed from \(O\) to \(P\text{,}\) and by \(r(t)\) the radial distance. With axis \(Ox\) defined as the fixed line perpendicular to \(\bf u\text{,}\)\(\theta (t)\) is the angle made by line \(OP\) with axis \(Ox\text{.}\)
Figure6.7.3.
Find the absolute velocity of \(P\text{,}\) that is, measured relative to the ground on the polar basis \((\be_r, \be_\theta )\text{.}\)
Find the trajectory \(r(\theta)\) of \(P\) assuming that at time \(t=0\text{,}\)\(\theta = 0\) and \(r= r_0\text{.}\) Characterize this trajectory according to the ratio \(e= u/v\text{.}\) Plot the trajectories of \(P\) for \(e=0.5, 1, 2\text{.}\)
4.
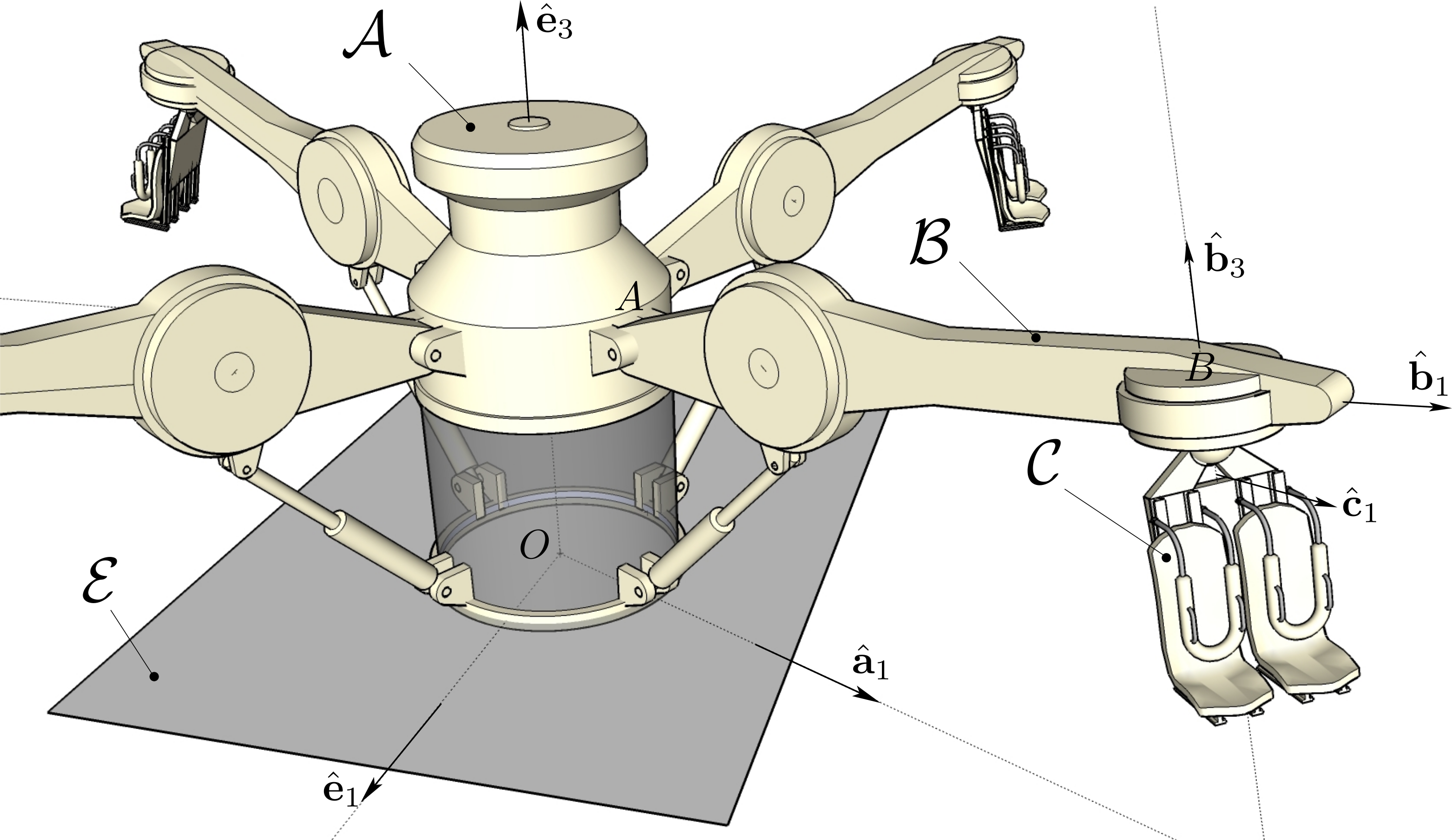
Consider the “grasshopper” carousel of Figure 6.7.4. The system is composed of three interconnected rigid bodies \(\cA\text{,}\)\(\cB\) and \(\cC\text{.}\) It is comprised of a central mast \(\cA (O, \bha_1, \bha_2, \bha_3)\text{,}\) a system of arms such as \(\cB (A, \bhb_1, \bhb_2, \bhb_3)\) extending radially from the mast and supporting a passenger-carrying seat \(\cC (B, \bhc_1, \bhc_2 , \bhc_3)\text{.}\)
The mast \(\cA\) is in rotation with angle \(\psi\) about a vertical axis \((O, \be_3 = \bha_3 )\) relative to a referential \(\cE (O, \be_1, \be_2,\be_3)\) attached to the ground.
The arm \(\cB\) can rotate about axis \((A, \bha_2 = \bhb_2 )\) of \(\cA\) with angle \(\theta\) relative to \(\cA\text{.}\) An actuator (pneumatic jack) mounted between \(\cA\) and \(\cB\) is able to create sudden lifting or lowering motions of arm \(\cB\text{.}\)
The seat \(\cC\) supported by arm \(\cB\) can rotate about an axis \((B, \bhc_3= \bhb_3)\) with angle \(\phi\) relative to arm \(\cB\text{.}\) The points \(A\) and \(B\) are defined by \(\br_{OA}= h \be_3 + R \bha_1\) and \(\br_{AB} = L \bhb_1\) (\(h\text{,}\)\(R\text{,}\) and \(L\) are constant).
Figure6.7.4.
Find the kinematic screws \(\{\cV_{\cC/\cB}\}\text{,}\)\(\{\cV_{\cB/\cA}\}\) and \(\{\cV_{\cA/\cE}\}\text{.}\)
Find the kinematic screw \(\{\cV_{\cC/\cE}\}\) by using the kinematic loop formula.
Solution.
The motion of \(\cC\) relative to \(\cB\) is a rotation of axis \((B,\bhb_3)\) and angle \(\phi\text{:}\)