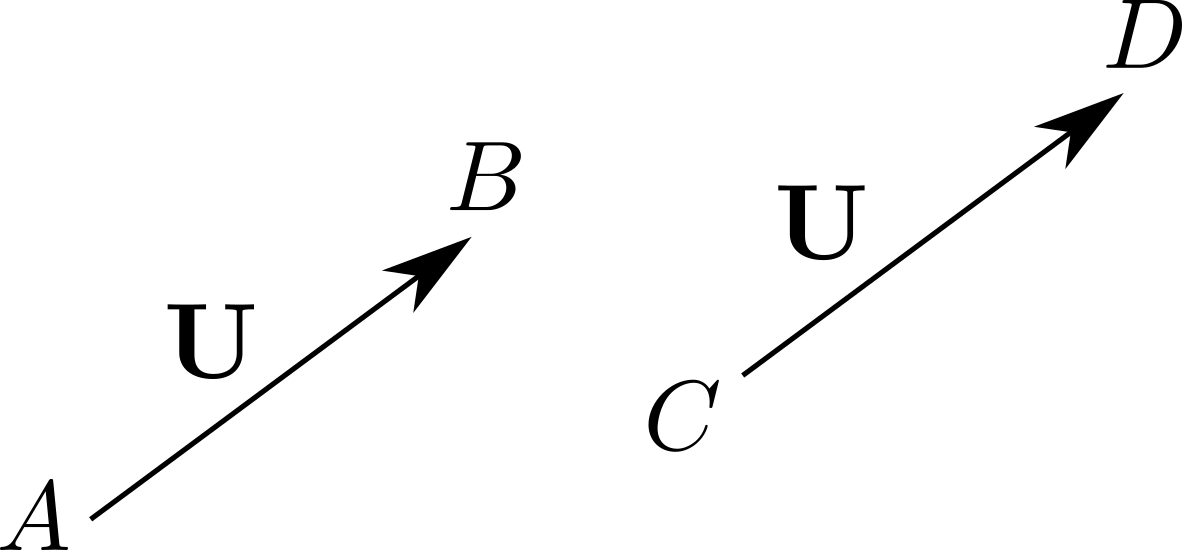
We can define vectors in an intuitive manner as a directed line segment. Hence, a vector \(\bU\) 1 is characterized by its magnitude, denoted \(|\bU|\text{,}\) and by its direction. On a more abstract level, vectors are defined as equivalent classes of ordered pairs of points \((A,B)\) of a three-dimensional space: two ordered pairs \((A,B)\) and \((C,D)\) are equipollent if (i) their supports are parallel, (ii) they have the same order, (iii) they have the same magnitude. The equivalence \((A,B)\sim (C,D)\) is denoted \(\overrightarrow{AB}= \overrightarrow{CD}\text{.}\) All ordered pairs equivalent to \((A,B)\) are then defined as vector \(\bU = \overrightarrow{AB}\text{.}\) See Figure A.1.1.
Hence two vectors \(\bU\) and \(\bV\) are equal if and only if they are parallel, have the same direction and the same magnitude: we then write \(\bU =\bV\text{.}\) The starting points of vectors are thus immaterial.
FigureA.1.1.
We can then define two operations which make the set of vectors a vector space\(E\) over the set of real numbers \(\mathbb{R}\text{:}\)
Multiplication by a scalar (the identity element is the real number \(1\text{.:}\) the product of scalar \(\lambda\) and vector \(\bU\) is a vector parallel to \(\bU\text{,}\) of magnitude \(|\la| |\bU|\text{,}\) in the same direction as \(\bU\) if \(\la \gt 0\text{,}\) opposed to \(\bU\) if \(\la \lt 0\text{.}\)
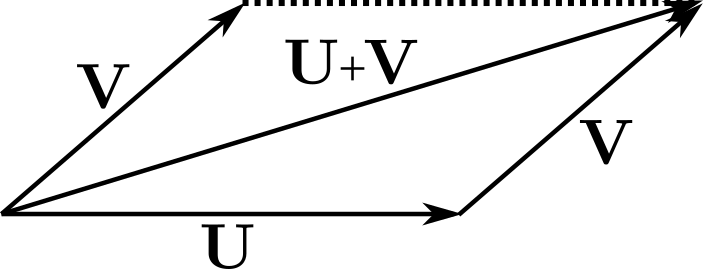
Addition of vectors (the identity element is the zero vector \(\bze\text{.:}\) the sum of two vectors \(\bU\) and \(\bV\) is obtained by constructing a triangle with \(\bU\) and \(\bV\) forming two sides, \(\bV\) adjoined to \(\bU\text{:}\) then the sum \(\bU+\bV\) is the vector starting at the origin of \(\bU\) and ending at the arrow of \(\bV\text{.}\) See Figure A.1.2.
To qualify as a vector space, the set \(E\) and the operations of addition and multiplication must adhere to the following axioms: given three vectors \(\bU\text{,}\)\(\bV\text{,}\) and \(\bW\text{,}\) and two real scalars \(\la\) and \(\mu\text{,}\)
Two vectors \(\bU\) and \(\bV\) are said to be collinear if there exists a non-zero scalar \(\la\) such that \(\bV =\la \bU\)
DefinitionA.1.4.Linear Independent vectors.
Two vectors \(\bU\) and \(\bV\) are said to be linearly independent if \(\la \bU +\mu \bV =\bze\) implies \(\la=\mu = 0\text{.}\)
DefinitionA.1.5.Basis of vectors.
Three vectors \((\bU_1, \bU_2,\bU_3)\) are said to form a basis of \(E\) if they are linearly independent. Then any vector \(\bV \in E\) can be written uniquely in the form
The scalars \(V_1\text{,}\)\(V_2\) and \(V_3\) are the components of \(\bV\) on basis \((\bU_1, \bU_2,\bU_3)\text{.}\)
SubsectionA.1.2Scalar Product
DefinitionA.1.6.Scalar product.
The scalar product (or dot product) between vectors \(\bU\) and \(\bV\) is the scalar defined by \(\bU \cdot \bV = | \bU | | \bV | \cos \al\text{,}\) where \(\al \in [0 , \pi] \) is the angle measured between \(\bU\) and \(\bV\text{.}\)
A unit vector is a vector of magnitude \(1\) and denoted \(\bu\text{.}\)
A orthonormal basis \(b (\be_1, \be_2, \be_3)\) is a basis satisfying \(\be_i \cdot \be_j = 0\) if \(i\neq j\) and \(\be_i \cdot \be_i = 1\text{.}\) Vector space \(E\) equipped with the scalar product is a Euclidean space of dimension \(3\text{.}\) Any vector \(\bU\) of \(E\) can then be written on basis \(b\) as
Consider another basis \(b' (\be_1',\be_2',\be'_3)\) of \(E\) and define the coefficients \(c_{ij}= \be_i \cdot \be'_j\text{.}\) Consider the \(3\times 3\) matrix \([\cC]= [c_{ij}]\text{:}\) the \(j\)th column of \([\cC]\) is composed of the components of \(\be_j'\) on basis \(b\text{.}\) It is easily seen that \([\cC]\) gives the components of vector \(\bU\) from one basis to the other: more specifically, if \(\bU = \sum U_i \be_i = \sum U'_i \be_i' \) then
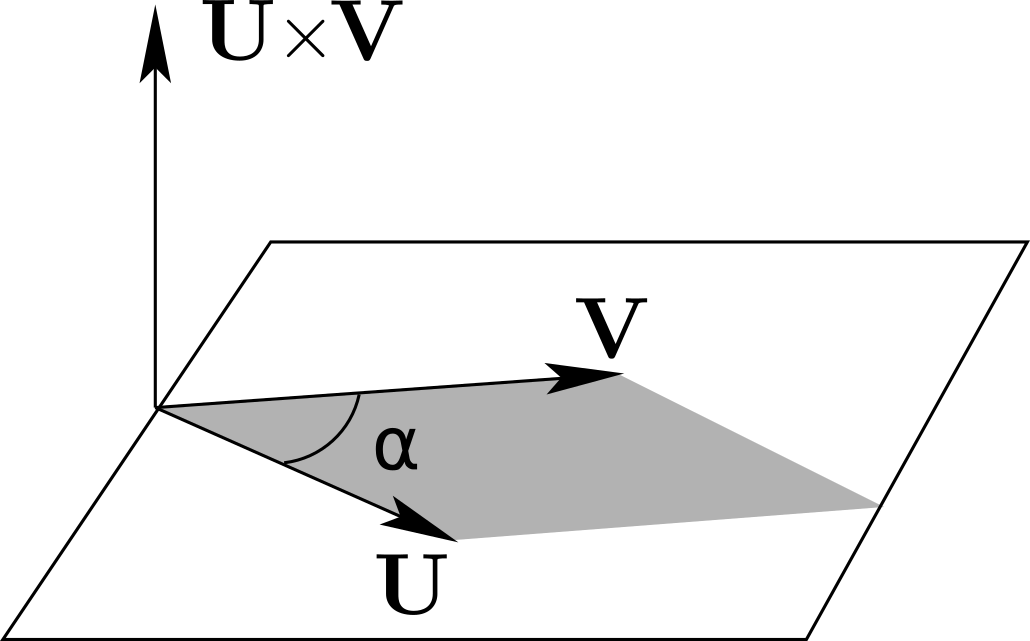
The cross product between two vectors \(\bU\) and \(\bV\) is the vector denoted \(\bU \times \bV\) such that (see Figure A.1.9):
\(\bU \times \bV\) is orthogonal to the plane spanned by \(\bU\) and \(\bV\text{,}\)
\((\bU , \bV , \bU \times \bV)\) is oriented in the right-handed direction 3 ,
its magnitude is given by \(| \bU \times \bV | = | \bU | | \bV | \sin \al \text{,}\) where \(\al \in [0, \pi] \) is the angle between \(\bU\) and \(\bV\text{.}\)
Multiplication by a scalar \(\la\text{:}\)\(\bU \times ( \la \bV) = \la \bU \times \bV\)
If three vectors satisfy the equality \(\bU \times \bV = \bU \times \bW \text{,}\) then \(\bV = \bW + \la \bU\) where \(\la\) is an indeterminate scalar.
Given a right-handed orthonormal basis \((\be_1 , \be_2 , \be_3)\text{,}\) we have the following relationships
\(| \bU \times \bV |\) represents the area of the parallelogram formed by the two vectors.
Given three vectors \(\bU\text{,}\)\(\bV\) and \(\bW\text{,}\) the triple vector product \(\bU \times (\bV \times \bW)\) can be found according to the formula
Given three non-zero vectors, \((\bU , \bV , \bW )\) is zero if two of the three vectors are collinear. Conversely, if the triple product \((\bU , \bV , \bW)\) is zero, two of the vectors are collinear or all three vectors are coplanar.
The triple scalar product can be calculated by resolving each vector on a right-handed orthonormal basis \((\be_1 , \be_2 , \be_3)\text{,}\) that is, \(\bU = U_1 \be_1 +U_2 \be_2 +U_3 \be_3\text{,}\)\(\bV = V_1 \be_1 +V_2 \be_2 +V_3 \be_3\text{,}\) and \(\bW = W_1 \be_1 +W_2 \be_2 +W_3 \be_3\text{.}\) Then, we have
for any \(\la \in \mathbb{R}\) and any two vectors \(\bU\) and \(\bV\text{.}\) The identity operator \(\cI\) is the operator satisfying \(\cI(\bU) = \bU\text{.}\)
DefinitionA.1.12.Invertible linear operator.
A linear operator \(\cL\) is said to be invertible if there exists an operator denoted \(\cL^{-1}\text{,}\) called the inverse of \(\cL\text{,}\) such that \(\cL^{-1} \circ \cL = \cL\circ \cL^{-1} = \cI\text{.}\)
PropertiesA.1.4.
If \(\cL_1\) and \(\cL_2\) of \(E\) are two linear operators, then \(\cL_1 \circ \cL_2\) is a linear operator. In general \(\cL_1 \circ \cL_2 \neq\cL_2 \circ \cL_1\text{.}\)
All linear operators satisfy \(\cL(\bze) = \bze\text{.}\)
The kernel of linear operator \(\cL\) is the subset \(\text{ker}(\cL)= \{ \bX\in E \,|\, \cL(\bX) = \bze\}\text{.}\) The range of \(\cL\) is the subset \(\cL(E)\text{.}\) In general, we have \(\text{dim}(\text{ker}(\cL)) +\text{dim}(\cL(E)) = \text{dim} (E)\text{.}\)
A linear operator \(\cL\) is entirely defined by the mapping by \(\cL\) of basis vectors. Given a right-handed orthonormal basis \(b (\be_1,\be_2,\be_3)\text{,}\) let \(\la_{ij}\) be the scalars defined by
The scalars \((\la_{ij})_{i,j=1,2,3}\) define the matrix of \(\cL\) on basis \(b\text{:}\) it is denoted \([\cL]_b\) and written in the form of a \(3\times 3\) array
The \(j\)th column of matrix \([\cL]_b\) represents the components of vector \(\cL(\be_j)\) on basis \(b\text{.}\) The mapping by \(\cL\) of vector \(\bU\) can then be obtained as the product \([\cL]_b [\bU]_b\) where \([\bU]_b\) represent vector \(\bU\) on basis \(b\text{:}\)
The trace of a linear operator \(\cL\text{,}\) denoted \(\text{tr}(\cL)\text{,}\) is the scalar \(\la_{11}+\la_{22}+\la_{33}\text{,}\) where \(\la_{ii} = \be_i \cdot \cL(\be_i)\text{.}\) It is independent of the choice of basis \(b\text{.}\)
PropertiesA.1.6.
The trace satisfies the property \(\text{tr}(\cL_1 \circ \cL_2) =\text{tr}(\cL_2 \circ \cL_1)\text{.}\)
Given an invertible linear operator \(\cL_1\text{,}\)\(\text{tr}(\cL_1^{-1} \circ \cL_2 \circ \cL_1 ) = \text{tr}(\cL_2)\text{.}\)
DefinitionA.1.16.Orthogonal linear operator.
A linear operator \(\cL\) of \(E\) is said to be orthogonal if it satisfies one the following three equivalent properties:
\(\cL(\bU) \cdot \cL (\bV) = \bU \cdot \bV\) for all \(\bU\) and \(\bV\) of \(E\text{,}\)
\(|\cL(\bU)| = |\bU|\) for all \(\bU\) of \(E\text{,}\)
\(\cL^* \circ \cL = \cI\text{.}\)
The set of orthogonal operators forms a group, called orthogonal group of \(E\text{.}\)
PropertiesA.1.7.
Given an orthonormal basis \(b\text{,}\) the matrix of \(\cL\) in basis \(b\) is orthogonal}, that is, it satisfies \([\cL]^T_b [\cL]_b = [\cI]_b\text{.}\)
Orthogonal operators satisfy the property \(\det [\cL]_b = \pm 1\text{.}\) The orthogonal operators satisfying \(\det [\cL]_b = 1\) form a subgroup denoted \(SO(3)\text{.}\)
For each orthogonal operator \(\cL\text{,}\) there exists an orthonormal basis \(b(\be_1,\be_2,\be_3)\) such that the matrix of \(\cL\) on \(b\) takes the form
with \(\ep = \pm 1\text{.}\) For \(\ep =1\text{,}\)\(\det[\cL]_b = 1\) and \(\cL\) is a rotation} about \(\be_3\) of angle \(\te\text{,}\) denoted \(\cR_{\te,\be_3}\text{.}\) Note that \(\text{tr}(\cR_{\te,\be_3}) = 2\cos\te +1 \text{.}\)