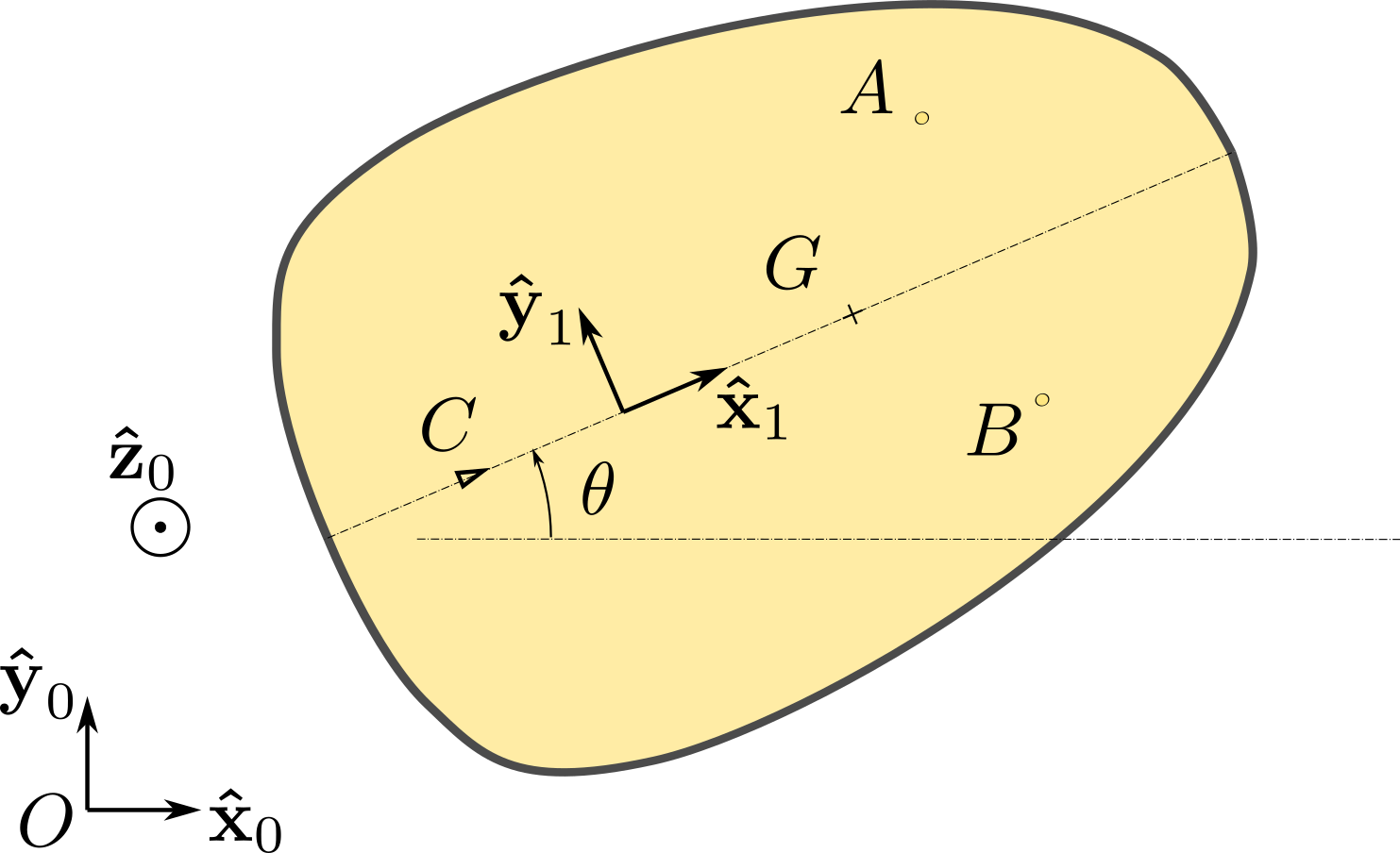
a. We impose that the velocity of \(C\) is directed along \(\bx_1\) to find
\begin{equation*}
\vel_{C\in 1/0} \cdot \by_1 = -\dx\sin\te +\dy \cos\te = 0 \qquad{(1)}
\end{equation*}
Equation (1) represents a non-integrable non-holonomic constraint equation. The kinematic screw of body 1 takes the following expression in terms of coordinates \(x,y,\te\text{:}\)
\begin{equation*}
\{\cV_{1/0} \}= \begin{Bmatrix} \dte \bz_0 \\\\ \dx \bx_0 + \dy \by_0 \end{Bmatrix}_C
= \begin{Bmatrix} \dte \bz_0 \\\\ v_C \bx_1 \end{Bmatrix}_C
\end{equation*}
with \(v_C\) given by \(v_C = \dx \cos\te + \dy \sin\te\text{.}\)
b. The action screw at contact point \(C\) must satisfy
\begin{equation*}
\begin{Bmatrix} \dte \bz_0 \\\\ v_C \bx_1 \end{Bmatrix}_C
\cdot
\begin{Bmatrix} X\bx_0 +Y \by_0 +Z \bz_0 \\\\ L\bx_0 +M\by_0 +N \bz_0 \end{Bmatrix}_C
=
N \dte+ v_C (X \cos\te + Y \sin\te) =0
\end{equation*}
for all possible values of \(\dte\) and \(v_C\text{:}\) this leads to the conditions
\begin{equation*}
N =0 , \qquad X\cos\te + Y \sin\te =0 \qquad{(2-3)}
\end{equation*}
c.To derive the three Lagrange equations \(\cL_{1/0}^q\) for \(q=x,y,\te\text{,}\) we must assume Lagrange assumption that \((x,y,\te,\dx,\dy,\dte)\) are independent variables. We must ignore equation (1). Accordingly, the kinematic screw is written in the form
\begin{equation*}
\{\cV_{1/0} \}= \begin{Bmatrix} \dte \bz_0 \\\\ \dx \bx_0 + \dy \by_0 \end{Bmatrix}_C
=
\dte \begin{Bmatrix} \bz_0 \\\\ \bze\end{Bmatrix}_C
+ \dx \begin{Bmatrix} \bze \\\\ \bx_0 \end{Bmatrix}_C
+ \dy \begin{Bmatrix} \bze \\\\ \by_0 \end{Bmatrix}_C
\end{equation*}
leading to the expressions of the partial kinematic screws:
\begin{equation*}
\{\cV_{1/0}^x \}= \begin{Bmatrix} \bze \\\\ \bx_0 \end{Bmatrix}_C , \quad
\{\cV_{1/0}^y \}= \begin{Bmatrix} \bze \\\\ \by_0 \end{Bmatrix}_C , \quad
\{\cV_{1/0}^\te \}= \begin{Bmatrix} \bz_0 \\\\ \bze\end{Bmatrix}_C
\end{equation*}
and the expression of the kinetic energy (using equation
(9.7.1))
\begin{align*}
2\kin_{1/0} \amp = m \vel_{C\in 1/0}^2 + 2m \vel_{C\in 1/0} \cdot (\dte\bz_0 \times b\bx_1) + I_C \dte^2\\
\amp = m (\dx^2 + \dy^2) + 2m b \dte (-\dx\sin\te + \dy \cos\te) + I_C \dte^2
\end{align*}
From this last expression, we obtain
\begin{equation*}
\left[ \frac{d}{dt}\frac{\partial}{\partial \dx}-\frac{\partial}{\partial x}\right] \kin_{1/0} =
m \frac{d}{dt} (\dx- b\dte \sin\te)
\end{equation*}
\begin{equation*}
\left[ \frac{d}{dt}\frac{\partial}{\partial \dy}-\frac{\partial}{\partial y}\right] \kin_{1/0} =
m \frac{d}{dt} (\dy+ b\dte \cos\te)
\end{equation*}
\begin{equation*}
\left[ \frac{d}{dt}\frac{\partial}{\partial \dte}-\frac{\partial}{\partial \te}\right] \kin_{1/0} =
\frac{d}{dt} (I_C \dte- mb\dx\sin\te+mb \dy\cos\te) - mb \dte(-\dx\cos\te-\dy\sin\te)
\end{equation*}
The expressions of the power coefficients \(\qQ^q_{\bar{1}\to 1/0}\) are found as follows
\begin{equation*}
\qQ^x_{\bar{1}\to 1/0}= \{\cV_{1/0}^x \}\cdot
\begin{Bmatrix} X\bx_0 +Y \by_0 +Z \bz_0 \\\\ L\bx_0 +M\by_0 +N \bz_0 \end{Bmatrix}_C
= X
\end{equation*}
\begin{equation*}
\qQ^y_{\bar{1}\to 1/0}= \{\cV_{1/0}^y \}\cdot
\begin{Bmatrix} X\bx_0 +Y \by_0 +Z \bz_0 \\\\ L\bx_0 +M\by_0 +N \bz_0 \end{Bmatrix}_C
= Y
\end{equation*}
\begin{equation*}
\qQ^\te_{\bar{1}\to 1/0}= \{\cV_{1/0}^\te \}\cdot
\begin{Bmatrix} X\bx_0 +Y \by_0 +Z \bz_0 \\\\ L\bx_0 +M\by_0 +N \bz_0 \end{Bmatrix}_C
= N
\end{equation*}
The effect of gravity and the reactions at \(A\) and \(B\) do not contribute to these energy coefficients. These expressions lead to three Lagrange equations:
\begin{align*}
\cL_{1/0}^x: \amp \quad m \frac{d}{dt} (\dx- b\dte \sin\te) = X \amp \qquad(4)\\
\cL_{1/0}^y:\amp \quad m \frac{d}{dt} (\dy+ b\dte \cos\te) = Y \amp \qquad (5)\\
\cL_{1/0}^\te: \amp \quad I_C \ddte + mb(-\ddx\sin\te+\ddy\cos\te) = N \amp \qquad (6)
\end{align*}
Equations (1-6) allow for the determination of \((x,y,\te,X,Y,N)\text{.}\) By eliminating \((X,Y,N)\) we obtain the equations of motions after a few manipulations:
\begin{align*}
\ddx \amp = b \dte^2 \cos\te - \dx\dte \tan\te\\
\ddy \amp = b \dte^2 \sin\te + \dx\dte\\
I_C \ddte \amp = -mb \dte (\dx\cos\te + \dy \sin\te)
\end{align*}