Section15.4Motion of a Gyroscope about a Fixed Point
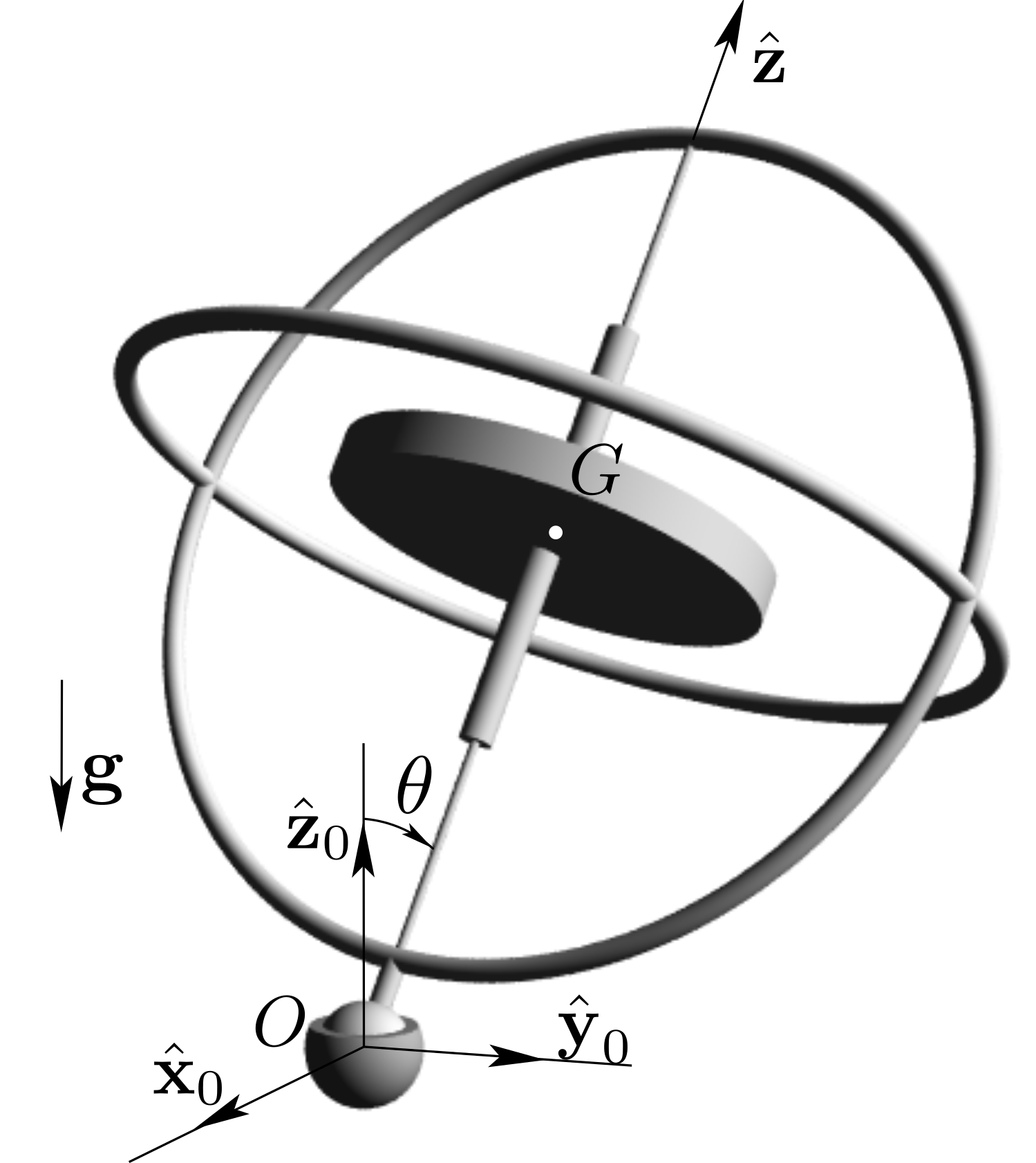
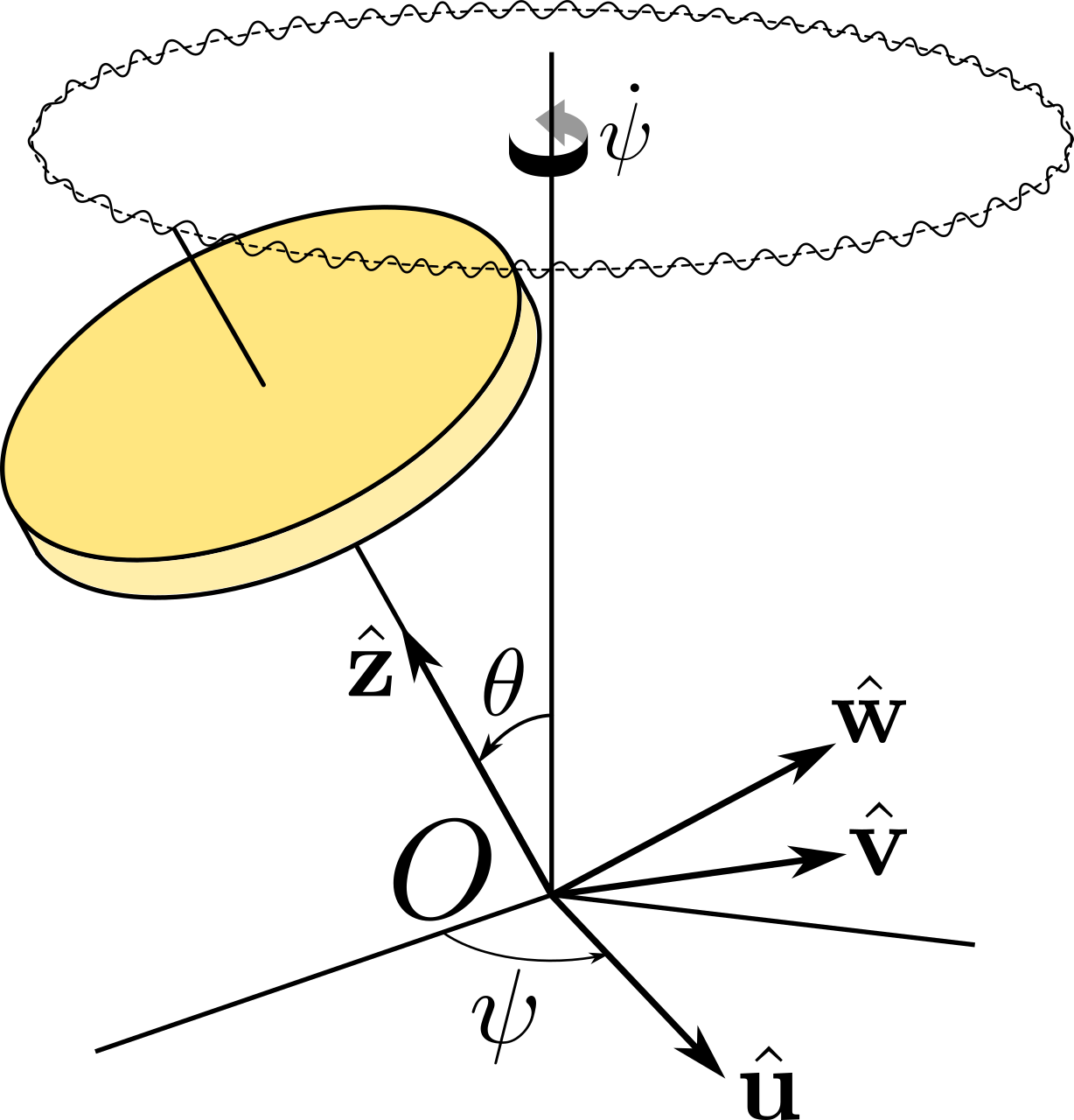
To continue our study of the motion of gyroscope’s axis, we consider the particular case of a gyroscope whose axis \((G, \bz)\) possesses a point \(O\) fixed in Newtonian referential \(\cE (O, \bx_0 , \by_0 ,\bz_0)\text{.}\) See Figure 15.4.1. A physical realization would consist of a spinning top in contact with a horizontal plane at a fixed point \(O\) or a gyroscope constrained to \(\cE\) by a frictionless spherical joint.
Figure15.4.1.Gyroscope with fixed point \(O\) (spinning top)
We denote by \(\bM_O\) the moment of the external forces about point \(O\text{.}\) The assumption \(\bM_G \cdot \bz = 0\) implies \(\bM_O \cdot \bz = 0\text{,}\) since \(\br_{OG}\) is collinear to \(\bz\text{.}\) Let \(a\) be the distance from \(O\) to \(G\text{,}\) that is, \(\br_{OG} = a \bz\text{,}\) and \(I = A + ma^2\) be the moment of inertia about an axis perpendicular to \((O, \bz)\text{.}\) Since \(d\bH_O /dt = \bM_O\text{,}\) the equation of motion of axis \((O, \bz)\) is obtained from (15.3.5) by substituting \(\bM_G\) with \(\bM_O\) and \(A\) with \(I\text{:}\)
\begin{equation}
I \bz \times \frac{d^2\bz}{dt^2} = \bM_O - C \omega_z \frac{d \bz}{dt}\tag{15.4.1}
\end{equation}
where the axial angular velocity \(\omega_z = \bOm \cdot \bz\) remains constant during the motion. When the only perturbing effect is that due to gravitational forces, we have \(\bM_O = mg a \bz_0 \times \bz\text{.}\)
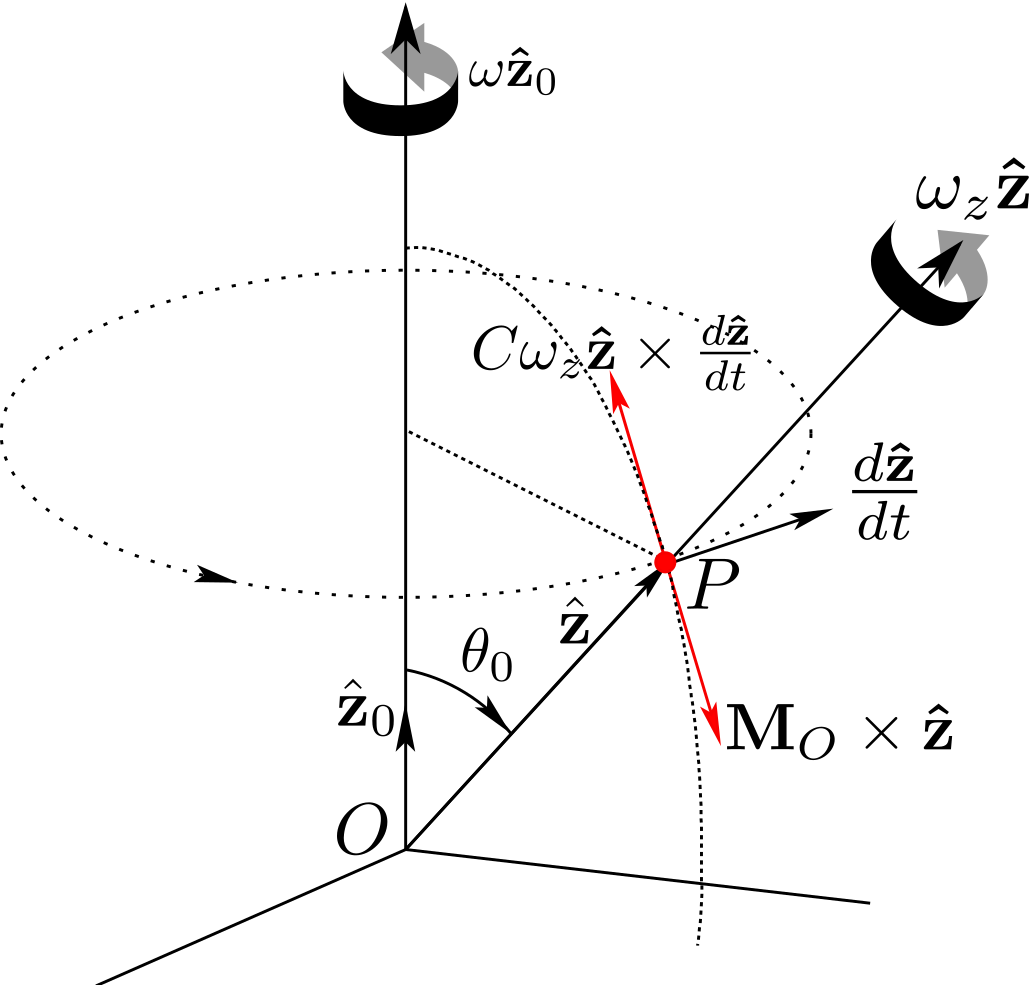
Recall that the motion of the gyroscope’s axis can be visualized by considering the fictitious particle \(P\) of fictitious mass \(I\) defined by position vector \(\br_{OP} = \bz\) and moving on the unit sphere of center \(O\) according to
A particular case of equation (15.4.1) corresponds to an axisymmetric body in Euler-Poinsot motion considered in Subsection 11.4.2. In this case \(\bM_O = \bze\text{,}\) and equation (15.4.1) can be integrated to give \(I \bz \times
\tfrac{d\bz}{dt} + C \omega_z \bz ={\bf h}_0 =\) constant, implying that \(\bH_O \cdot \bz = C\omega_z\text{:}\) particle \(P\) moves uniformly around a circular trajectory in a plane perpendicular to constant vector \({\bf h}_0\text{.}\)
Now let us consider the feasibility of a particular motion of the gyroscope’s axis under the destabilizing action of gravity, that is, for \(\bM_O = mg a \bz_0 \times \bz\text{.}\) We ask whether the steady precession of this axis is possible, that is, whether this axis can rotate about the vertical \((O, \bz_0)\) with constant angular speed \(\omega\) while maintaining a constant angle \(\te_0\) with the vertical. This amounts to answering the question: can a value of angular velocity \(\om\) be found satisfying the conditions
such that equation (15.4.1) can be satisfied? Upon replacing \(d\bz/dt\) by \(\om \bz_0\times \bz\) and \(d^2 \bz /dt^2\) by \(\om^2 (\cos\te_0 \bz_0 -\bz )\) into (15.4.1) we find
\begin{equation*}
I \bz \times \om^2 (\cos\te_0 \bz_0
-\bz ) = mg a \bz_0 \times \bz - C \omega_z \om \bz_0 \times \bz
\end{equation*}
leading to the following quadratic equation in \(\om\)
\begin{equation}
I \om^2 \cos\te_0 - C \omega_z \om + m g a = 0 .\tag{15.4.3}
\end{equation}
If the condition
\begin{equation*}
C \omega_z > ( 4I mg a \cos\te_0 )^{1/2}
\end{equation*}
\begin{equation}
\om_2 = {C \omega_z \over I \cos\te_0}\tag{15.4.6}
\end{equation}
If the initial velocity \(d\bz /dt\) is zero, then the slow precession speed \(\om_1\) is attained by the gyroscope’s axis. Moreover, we see from (15.4.5) that the larger the spin angular speed \(\omega_z\text{,}\) the slower the precessional motion about \((O, \bz)\). In this regime, the angular momentum about any point \(Q\) of the gyroscope axis \((G, \bz)\) is approximately given by \(\bH_{Q, \cB / \cE} = C \omega_z \bz\text{,}\) since the transverse term \(A \bz \times d\bz /dt\) being of the order \(1/\om_z\) is negligible. Moreover, the fictitious particle \(P\) governed by equation (15.4.2) rotates uniformly around the circular trajectory of axis \((O,\bz_0)\) at a slow constant angular velocity \(\om \bz_0\) which is solution of:
It appears that the precessional motion of axis \((O,\bz)\) can be obtained as if the external applied moment \(\bM_O\) is in balance at all time with the gyroscopic couple \(\bGa_g = - C \omega_z \tfrac{d \bz}{dt}\text{.}\)
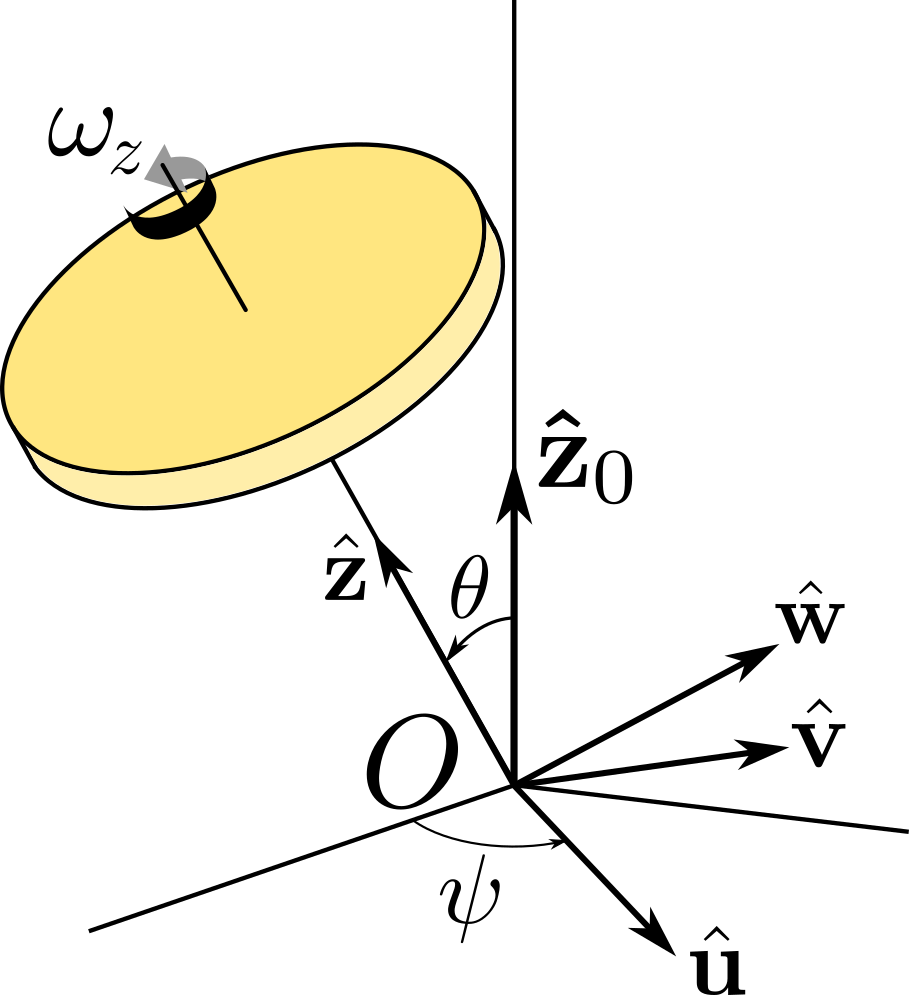
To study the stability of the precessional motion we consider the particular motion corresponding to the initial condition \(d\bz/dt =0\) at \(\te = \te_0\text{.}\) We are only interested in very large values of \(C\om_z\text{,}\) that is, we assume that \(C\om_z\) satisfies condition (15.4.4). To parametrize the orientation of the gyroscope axis \((O,\bz)\text{,}\) we adopt Euler angles \(\psi\) (the precessional angle) and \(\te\) (the nutational angle) according to the transformations (see Figure 15.4.4)
The component of angular momentum \(\bH_O\) about \(O\) on unit vector \(\bz_0\) is conserved. Upon taking the scalar product of equation (15.4.1) with \(\bz_0\text{,}\) we obtain
\begin{equation*}
\bz_0 \cdot \left( I \bz \times \frac{d\bz}{dt} \right) = - C \omega_z \bz_0 \cdot {d \bz \over dt}
\end{equation*}
leading to first integral
\begin{equation}
I \dpsi \sin^2 \te = C \omega_z (\cos\te_0 -\cos\te)\tag{15.4.9}
\end{equation}
We can use equation (15.4.9) to substitute \(\dpsi^2\) in equation (15.4.8) to obtain
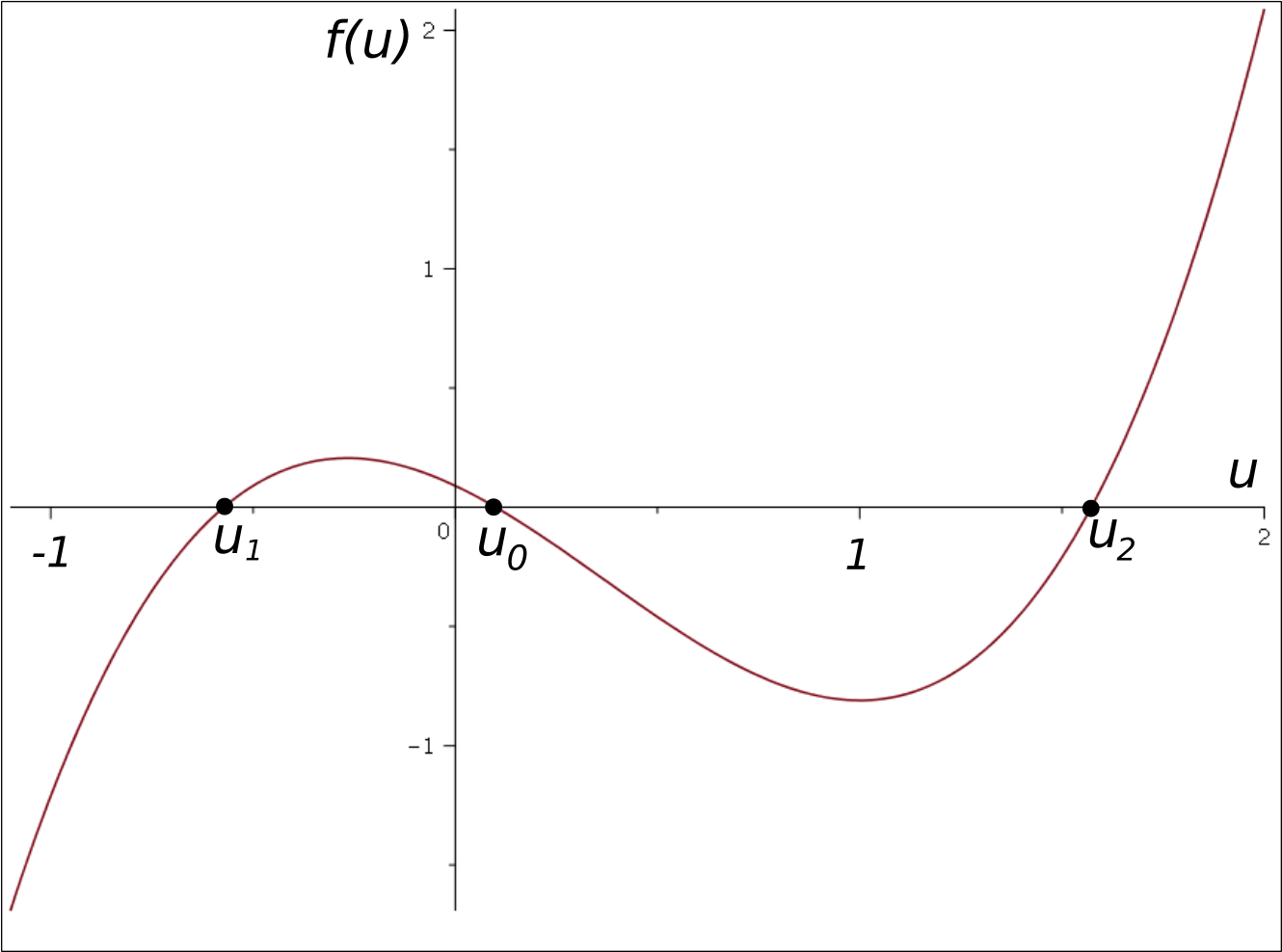
with the constants \(\beta = 2mga/I\) and \(\alpha = C^2 \om_z^2/ I^2\text{.}\) The behavior of the gyroscope about \(O\) can then be determined by listing the properties of function \(f(u)\) (a cubic polynomial):
\(f(u) \sim \beta u^3\) as \(|u|\to \infty\text{,}\)
\(f(\pm 1) \lt 0\) and \(f(u_0) =0\) ,
for a physically realizable motion of body \(\cB\text{,}\)\(f(u)\) has necessarily three real roots \(u_0\text{,}\)\(u_1\) and \(u_2\) satisfying \(-1 \lt u_1 \lt u_0 \lt 1 \lt u_2\text{,}\)
\(\du^2 >0\) imposes the bounds \(u_1 \leq u \leq u_0\text{.}\)
A sketch of function \(f(u)\) is shown in Figure 15.4.5.
Figure15.4.5.
We conclude that angle \(\theta\) must evolve periodically between two bounds: \(\te_1 \leq \te \leq \te_0\) (corresponding to the values \(u_1\) and \(u_0\)). This property corresponds to the nutational oscillations of the gyroscope’s axis. It is easy to see that, as \(\om_z \to \infty\text{,}\) root \(u_1\) tends to \(u_0\text{:}\)
The difference \(\te_0 -\te_1\) behaves like \(1/(C \om_z)^2\) for large values of \(C\om_z\text{:}\) the axis will exhibit nutational oscillations of very small amplitude \((\te_0-\te_1)/2\) and very large frequency. We can then recover the slow precessional speed of equation (15.4.5) by finding the average of \(\dpsi\) using (15.4.9)
where the average \(\langle u_0 -u \rangle\) is taken to be \(\half (u_0 - u_1)\text{.}\) We can now characterize the motion of fictitious point \(P\) described by (15.4.2) on the unit sphere: \(P\) stays within a distance of the order \(1/(C\om_z)^2\) from an average path described by the circle \(\te=\te_0\) with the angular speed of the order \(1/(C\om_z)\text{.}\)
Figure15.4.6.The precessional and nutational motions of a gyroscope about a fixed point.
In conclusion, this study of gyroscopic effects underscores the following characteristics:
The velocity \(d \bz /dt\) whose magnitude gives a measure of the angular speed of the gyroscope’s axis is proportional to the moment \(\bM_O\) of the applied forces with the coefficient of proportionality \(1/C \omega_z \text{:}\) if \(\bM_O\) does not become excessive, the angular displacement of the axis remains very slow. This characteristic is called gyroscopic stiffness: the gyroscope’s axis keeps a direction which is sensibly constant despite the perturbing forces which tend to modify its direction.
The perturbing forces despite their weakness act in a non-intuitive manner: the “force” \(\bF = \bM_O \times \bz \) sets in motion fictitious particle \(P\) in a direction perpendicular to \(\bF\text{.}\) There lies the paradox of gyroscopic effects: the applied moment \(\bM_O\) does not produce a rotation of the gyroscope about the direction of \(\bM_O\text{,}\) but rather about a direction 90 degrees from the expected direction.