Section1.5Orientation of a Rigid Body: Equivalent Angle/Axis of Rotation
Despite their simple physical interpretations, the use of Euler sequences defined in Section 1.4 leads to significant difficulties for trajectories with large angle variations across singularities. Another drawback is the appearance of nonlinearities in the equations of motion and the inevitable numerical difficulties which ensue during integration. The use of rotation matrix expressed in terms of the nine direction cosines presented in Section 1.3 has the advantage of resolving the indetermination of Euler sequences, but has the disadvantage of having to account for six (nonlinear) relationships between these quantities.
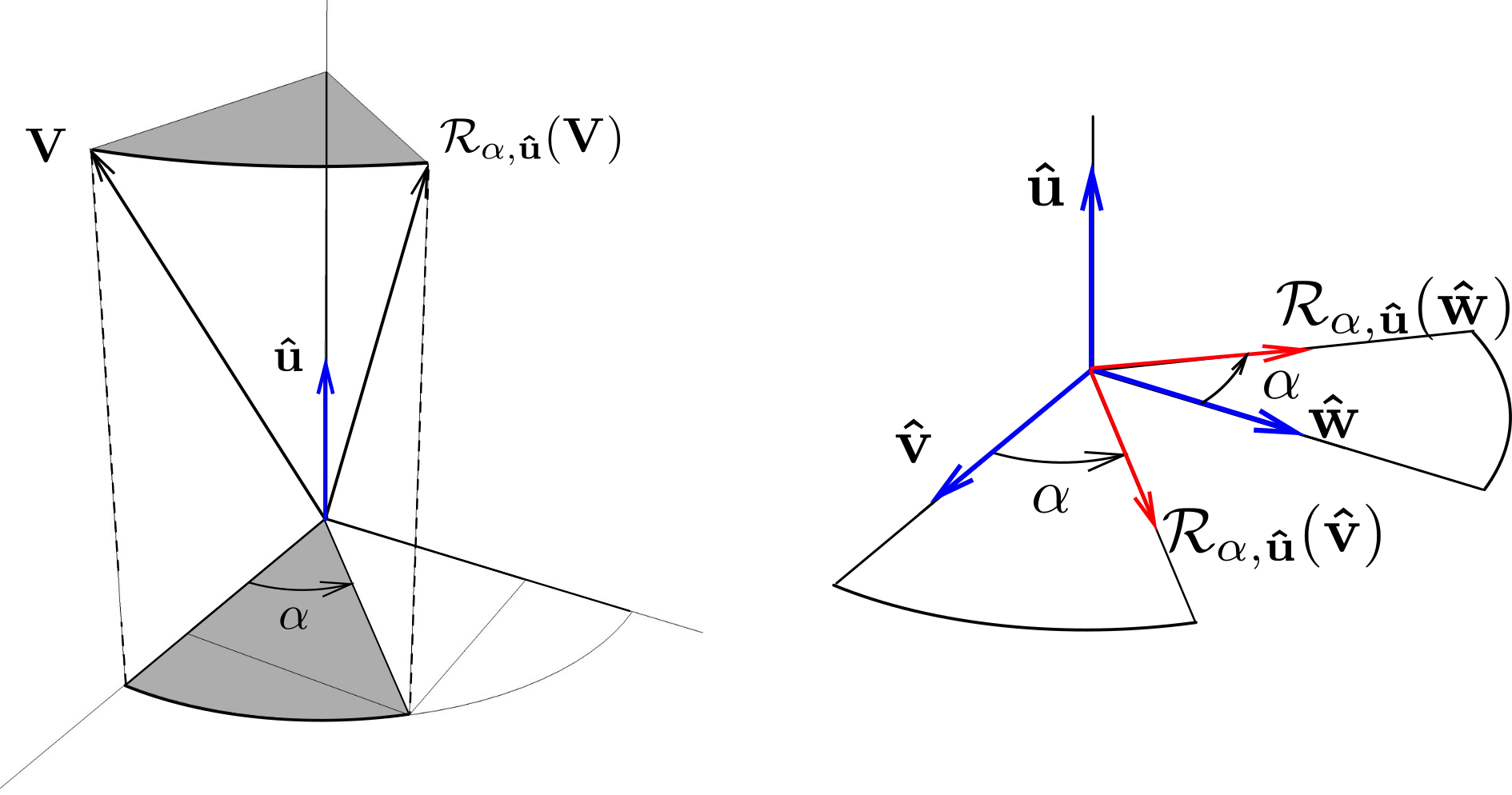
An alternative method consists of representing any rotation in terms of its so-called Euler parameters. Euler showed that an arbitrary composition of rotations can be realized by a single rotation \(\cR_{\al , \bu}\) of angle \(\al \in [0,2\pi)\) about a unit vector \(\bu\text{.}\) The parameters \((\al,\bu)\) are called Euler parameters or the {\em equivalent angle and axis} of the rotation. See Figure \ref{fig:eulerrotation}.
First, we give a formal definition of operator \(\cR_{\al , \bu}\text{.}\)
Definition1.5.1.
Given a unit vector \(\bu\text{,}\) there always exist two unit vectors \((\bv, \bw)\) such that \((\bu,\bv,\bw)\) forms a orthonormal, right-handed basis. Then, given \(\al \in \mathbb{R}\text{,}\) the rotation of angle \(\al\) about \(\bu\) is the linear operator \(\cR_{\al,\bu}\) such that:
This matrix expression of \(\cR_{\al , \bu}\) is not useful in practice. It would be much more practical to obtain a basis-free and coordinate-free expression of \(\cR_{\al , \bu}\text{.}\) This is provided by Rodrigues formula which gives an intrinsic representation of rotations:
Theorem1.5.3.Rodrigues formula.
The rotation \(\cR_{\al , \bu}\) of angle \(\alpha\) about unit vector \(\bu\) can be represented in the form
Finally if we use the identity \(\bu\times(\bu\times\bV) = (\bu\cdot \bV) \bu - \bV\text{,}\) we obtain Rodrigues formula (1.5.2).
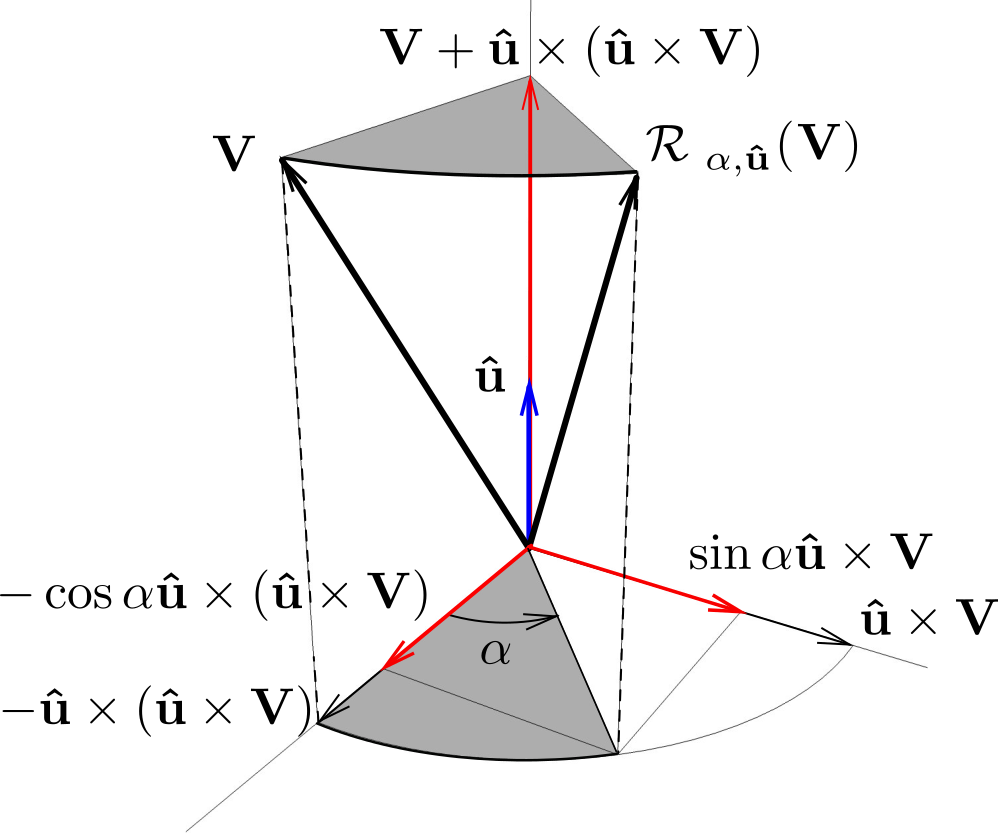
Figure1.5.4.Rodrigues formula.
A geometric interpretation of Rodrigues formula is shown in Figure 1.5.4 by considering the projections of vector \(\bV\) on \(\bu\) and on a plane perpendicular to \(\bu\text{,}\) vector \(\cR_{\al , \bu} (\bV)\) can be seen to be the sum of three contributions:
a contribution along \(\bu\text{:}\)\((\bV \cdot\bu)\bu = \bV + \bu\times(\bu\times\bV)\text{,}\)
a contribution along vector \(- \bu\times(\bu\times\bV)\text{:}\)\(- \cos\alpha \bu\times(\bu\times\bV)\text{,}\)
a contribution along vector \(\bu\times \bV\text{:}\)\(\sin\alpha \bu\times \bV\text{.}\)
Remark1.5.5.
The axis of rotation \(\cR\) can be found by solving for the vectors which remain invariant by \(\cR\text{,}\) that is, satisfying \(\cR(\bV) = \bV\text{.}\)
Remark1.5.6.
Once the unit vector \(\bu\) of the axis has been determined, the angle \(\al\) of rotation \(\cR\) can be found from a unit vector \(\bv\) normal to \(\bu\) and its mapping by \(\cR\text{:}\)
a. Show that \([\cL]_E\) is the matrix of a rotation.
b. Find the equivalent angle/axis of this rotation.
Solution.
a. It is easy to verify that \([\cL]_E\) is an orthogonal matrix, that is, \([\cL]_E [\cL]_E^T = [\cI]\text{.}\) It is equivalent to show that the column vectors \((\bc_1,\bc_2,\bc_3)\) of \([\cL]_E\) are unit vectors and mutually orthogonal and that \(\bc_3 =\bc_1\times \bc_2\text{.}\) Hence operator \(\cL\) is necessarily a rotation.
b. To find the axis of the rotation we look for the solution of \(\cL(\bV) = \bV\) (the eigenspace corresponding to eigenvalue \(+1\)), that is, we solve the equations
To find the unique angle \(\al\) corresponding to this choice of \(\bu\text{,}\) we identify a unit vector normal to \(\bu\text{:}\) we choose vector \(\bv = \frac{1}{\sqrt{2}} (\be_1 - \be_2)\) (it satisfies \(\bu\cdot \bv =0\)). Angle \(\al\) can be determined from
where we used \(\cL(\bv)= \frac{1}{3\sqrt{2}} (\be_1 +\be_2+4\be_3)\text{.}\) Note that \(\cos\al\) can also be found from the trace of \([\cL]_E\text{:}\)\(2 \cos\al + 1 = \text{tr}([\cL]_E)= 1\text{.}\) This gives angle \(\al = \frac{3\pi}{2}\text{.}\) In conclusion, operator \(\cL\) is the rotation \(\cR_{\frac{3\pi}{2}, \bu}\text{.}\)
Example1.5.8.
Find the matrix of the rotation \(\cR_{\pi,\bu}\) with \(\bu = -\frac{1}{3} \be_1 + \frac{2}{3} \be_2 -\frac{2}{3} \be_3\) on basis \((\be_1,\be_2,\be_3)\text{.}\)
Solution.
Method 1: We use Rodrigues formula for \(\bV = \be_1, \be_2, \be_2\) with \(\al=\pi\text{:}\) this will give the column vectors of matrix \([\cR_{\pi, \bu}]_E\text{:}\)
Method 2: We can find the matrix of \(\cR_{\pi,\bu}\) by exploiting the fact that for \(\al=\pi\text{,}\) we have the properties that \(\bV + \cR_{\pi,\bu} (\bV)\) is collinear to \(\bu\) and \(\bV - \cR_{\pi,\bu} (\bV)\) is normal to \(\bu\text{:}\) denoting \(\bV = x_1 \be_1 + x_2 \be_2 + x_3 \be_3\) and \(\cR_{\pi,\bu} (\bV) = x'_1 \be_1 + x'_2 \be_2 + x'_3 \be_3\text{,}\) we find four equations by expressing the conditions \(\bV + \cR_{\pi,\bu} (\bV) = \la \bu\)\((\la\in \mathbb{R})\) and \((\bV - \cR_{\pi,\bu} (\bV) ) \cdot \bu = 0\)
It is straightforward to obtain a matrix representation of \(\cR_{\al , \bu}\) on an arbitrary basis \((\bha_1, \bha_2, \bha_3)\text{:}\) denoting \(\bu = u_1 \bha_1 + u_2 \bha_2 + u_3 \bha_3\text{,}\) we find
Denoting the operator \(\cU:\; \bV \mapsto \bu\times \bV\) and \(\cI: \, \bV\mapsto \bV\) the identity operator, we note from this result that \(\cI + (1- \cos\alpha)\cU^2\) is the symmetric part of operator \(\cR_{\al , \bu}\) and that \((\sin\al) \cU\) represents its skew-symmetric part.
Conversely, given a rotation \(\cR\text{,}\) it is of interest to find its equivalent representation in terms of its Euler parameters \((\al,\bu)\text{.}\) Since \(\cR\) can always be written as the sum of its symmetric part \(\tfrac{1}{2} (\cR + \cR^T) \) and skew-symmetric part \(\tfrac{1}{2} (\cR - \cR^T)\text{,}\) we can relate \(\cR\) to its equivalent representation \(\cR_{\al,\bu}\) according to:
since the trace of operator \(\cU^2\) is \(-2\text{.}\) In particular for the rotation \(\cR_{EB}\) which maps basis \((\be_1 ,\be_2 ,\be_3)\) of \(\cE\) to basis \((\bhb_1 ,\bhb_2 ,\bhb_3)\) of body \(\cB\) we find that the equivalent angle \(\alpha\) satisfies
relative to basis \((\be_1 ,\be_2 ,\be_3)\text{.}\) We summarize these two results with the following theorem.
Theorem1.5.9.Equivalent rotation.
The rotation \(\cR_{EB}\) which maps basis \((\be_1 ,\be_2 ,\be_3)\) of \(\cE\) to basis \((\bhb_1 ,\bhb_2 ,\bhb_3)\) of body \(\cB\) admits the unique equivalent representation \(\cR_{\al,\bu}\) given by
The trace of an operator is an invariant: if \(\cR_{EB}\) is represented by the matrix \([r_{ij}]_b\) in some particular basis \(b\text{,}\) then equation (1.5.6) can be written as
Recall that \([\cC_{EB}] = [\cR_{EB}]_{_E} = [\cR_{EB}]_{_B}\text{,}\) hence the equality \((\cR_{EB} - \cR^T_{EB}) = 2 \sin\al \, \cU\) can be written on basis \((\bhb_1 ,\bhb_2 ,\bhb_3)\text{:}\)
If \(\alpha\) is close to \(\pi\text{,}\) then (1.5.7) should not be used since it may lead to a large error for \(\bu\text{.}\) Another method must be used.
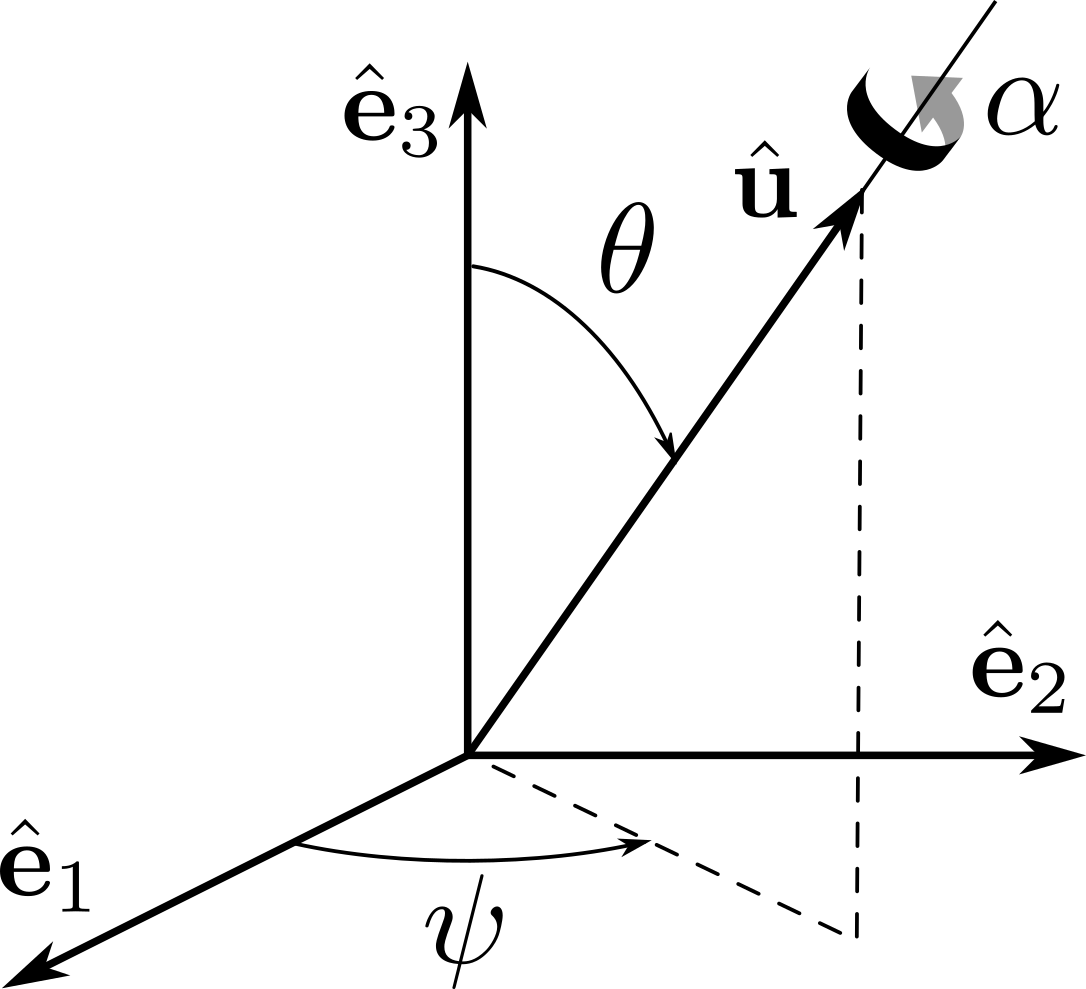
Consider the rotation \(\cR_{\alpha, \bu}\) of angle \(\alpha\) about unit vector \(\bu\) whose orientation is given by angle \((\psi,\te)\) relative to basis \((\be_1, \be_2, \be_3)\) of \(\cE\) as shown in Figure Figure 1.5.15.
Figure1.5.15.
a. Find the matrix \([\cR_{\alpha, \bu}]_{_E}\) in basis \((\be_1, \be_2, \be_3)\) by using Rodrigues formula.
b. Two bases can be defined from \((\be_1, \be_2, \be_3)\) by two consecutive rotations:
Find matrix \([\cR_{\alpha, \bu}]_{_V}\) in basis \((\bv_1,\bv_2, \bv_3)\text{,}\) then find the matrix \([\cR_{\alpha, \bu}]_{_E}\) by using matrix \([\cC_{EV}]\text{.}\)
Solution.
a. We can write the components of unit vector \(\bu\) on basis \((\be_1, \be_2, \be_3)\) in terms of angles \(\psi\) and \(\te\text{:}\)
b. Matrix \([\cR_{\alpha, \bu}]_{_V}\) takes a simple expression in basis \((\bv_1,\bv_2, \bv_3)\) since \(\bv_3 =\bu\) is invariant by rotation \(\cR_{\alpha, \bu}\text{:}\)
Then matrix \([\cR_{\alpha, \bu}]_{_E}\) is obtained in basis \((\be_1, \be_2, \be_3)\) by using the direction cosine matrix \([\cC_{EV}]\) according to formula (1.3.9).
The reader will check that the same result is obtained.
Finally, we end this section with the following question. Given two rotations \(\cR_{\al , \bu}\) and \(\cR_{\beta , \bv}\text{,}\) can the angle \(\gamma\) and direction \(\bw\) be found for their composition \(\cR_{\gamma , \bw}= \cR_{\beta , \bv} \circ \cR_{\al , \bu}\text{?}\) We may seek expressions for \((\gamma, \bw)\) by applying Rodrigues formula. The derivations are very tedious. However, we shall see in the next section that they can be performed in a straightforward manner by the use of quaternions.