Whenever there exist constraints between rigid bodies, such as encountered in a “point-contact” or any other joint, the application of the fundamental laws of dynamics is generally not sufficient to arrive at a closed set of equations: there exist more unknowns than equations, due to the fact that each contact action screw associated with such constraints generally leads to six additional unknown scalar quantities. This situation is not unexpected since it arises even in the case of a particle constrained to move along a rigid support. To resolve this indetermination, constitutive laws must be introduced, in order to describe the behavior of moving rigid bodies in contact with one another. Such laws may provide additional equations to fully resolve the indetermination.
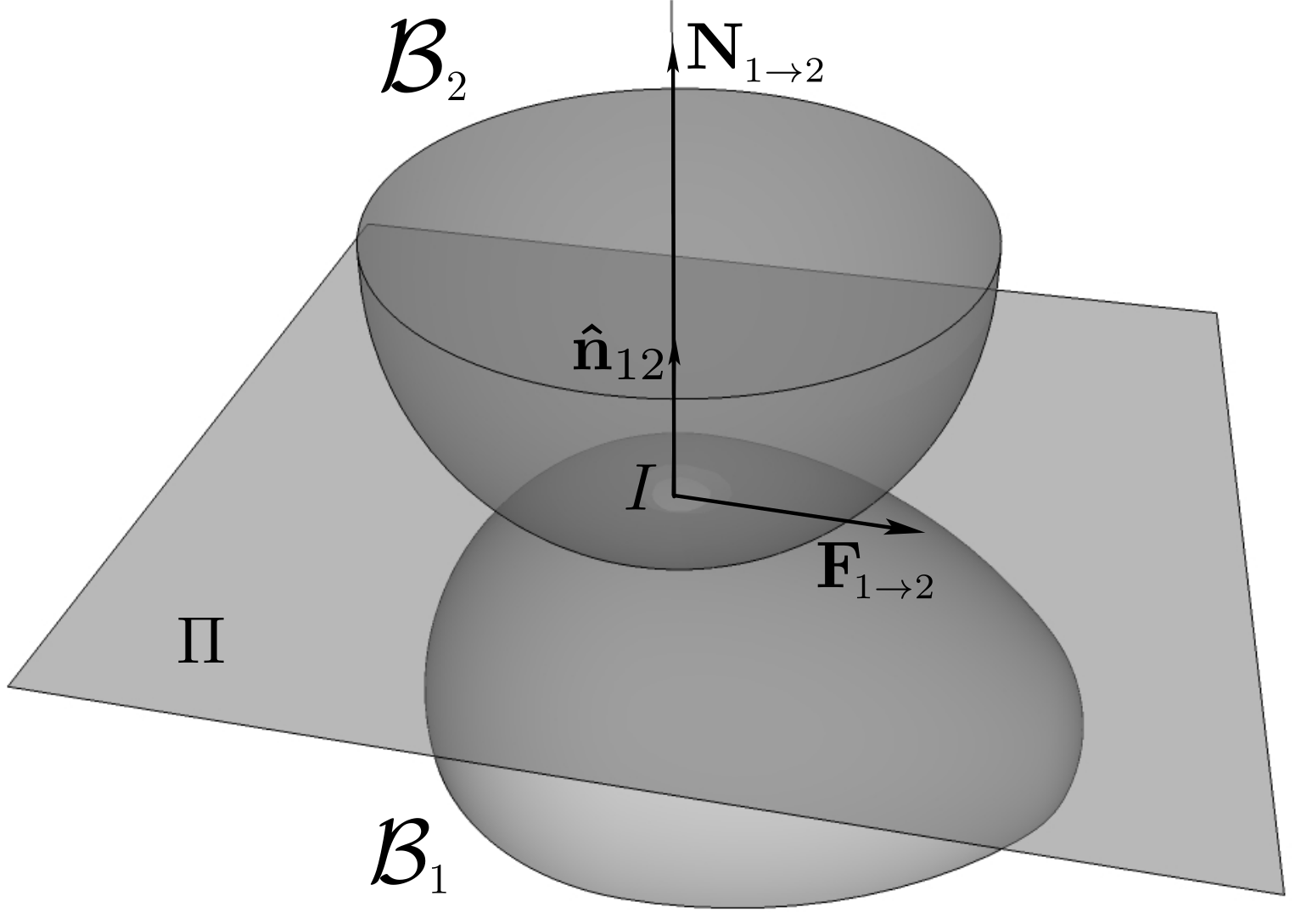
Consider two rigid bodies \(\cB_{1}\) and \(\cB_{2}\) in relative motion in a referential \(\cE\text{.}\) Assume that at least one of the bodies possesses a smooth surface. Rigid bodies \(\cB_{1}\) and \(\cB_{2}\) are assumed to be in contact at all time at a single point \(I\text{.}\) At any given time, a point \(I\) of \(\cB_{1}\) coincides with a point \(I\) of \(\cB_{2}\text{.}\) Denote by \(\Pi\) the common tangent plane to the bounding surfaces of \(\cB_1\) and \(\cB_2\) at point \(I\text{.}\) If one of the surfaces is not smooth (as in the case of a cone in contact at its apex with a smooth surface), then we define \(\Pi\) as the plane tangential to the smooth surface at \(I\text{.}\) Denote by \(\bn_{12}\) the unit normal vector to \(\Pi\) pointing from \(\cB_{1}\) to \(\cB_{2}\text{.}\) See Figure 10.3.1.
In general, point-contact between two rigid bodies is associated with a contact action screw\(\{ \cA^c_{\cB_{1} \to \cB_{2}} \}\) which may be resolved at point \(I\) in the following way
Component \(N_{1\to 2}\) is called the normal reaction force at \(I\text{.}\) It must satisfy the inequality \(N_{1\to 2} \geq 0\) at all times if the point-contact is unilateral, that is, if the rigid bodies are free to lose contact with each other under the action of other applied forces. If the equations of motion predict that at some time \(t^*\text{,}\)\(N_{1\to 2} = 0\) and subsequently \(N_{1\to 2} \lt 0\) for \(t> t^*\text{,}\) then the contact at \(I\) is lost and \(\{ \cA^c_{\cB_{1} \to \cB_{2}} \} = \{0\}\) for \(t \gt t^*\text{.}\)
Remark10.3.3.
The vector \(\bF_{1\to 2}\) is the tangential reaction force or frictional force at \(I\) and it is a measure of resistance to the sliding motion of \(\cB_2\) relative to \(\cB_1\text{.}\)
Remark10.3.4.
The components \(M_{In} = \bn_{12}\cdot \bM^c _{I, 1 \to 2}\) and \(\bM_{It} =\bM^c _{I, 1 \to 2}- M_{In} \bn_{12}\) of the moment at point \(I\) are measures of the resistance to the pivoting and rolling motions, respectively, of \(\cB_2\) relative to \(\cB_1\text{.}\) In general, moment \(\bM^c _{I, 1 \to 2}\) should not be expected to be zero, since the contact, although modeled as a point-contact, is in reality occurring over a small area surrounding point \(I\text{.}\)
Hence, in general, point-contact between two rigid bodies results in six additional unknowns. Problems of rigid body mechanics which involve contact actions will inevitably be unyielding unless assumptions are made to the contact action screw \(\{\cA^c_{ \cB_{1} \to \cB_{2}}\}\text{.}\)
The most drastic simplification amounts to neglecting friction: it is often the only simplification which makes the solution of problems tractable.
Subsection10.3.1Frictionless Contact between two Rigid Bodies
Definition10.3.5.Frictionless Contact.
The contact at point \(I\) is said to be frictionless if the resultant vector \(\bR^c_{1 \to 2}\) is assumed normal to surfaces in contact and bound to the point of contact, that is,
As will be seen in Subsection 10.3.4, frictionless contact can be generalized to line or surface contact. Furthermore, the dynamic analysis of systems of interconnected rigid bodies can often be made solvable (within the realms of rigid body mechanics) by assuming that the interconnecting joints between rigid bodies are frictionless. Frictionless joints are described in Section 10.4.
Subsection10.3.2Coulomb Laws of Sliding Friction
If friction must be taken into account, then we must rely on phenomenological laws governing the sliding motion of body \(\cB_2\) relative to body \(\cB_1\) under dry contact conditions, that is, in the absence of lubrication. It is necessary to distinguish two kinematic cases whether there is slip or not.
Definition10.3.6.Coulomb Laws (dry friction).
The contact between bodies \(\cB_1\) and \(\cB_2\) is characterized by two dimensionless coefficients \(\mu_s\) and \(\mu_k\text{,}\) called coefficients of static and kinetic friction. These coefficients characterize the reaction force \(\bR^c_{1 \to 2}\) in the following manner:
Case 1: if \(\cB_2\) slips relative to \(\cB_1\text{,}\) that is, \(\vel_{I\in 2 / 1} \neq 0\text{,}\) then frictional force \(\bF_{1\to 2}\) satisfies
Case 2: if \(\cB_2\) rolls and pivots without slipping relative to \(\cB_1\) about \(I\text{,}\) i.e. \(\vel_{I\in 2 / 1} = {\bf 0}\text{,}\) then the inequality
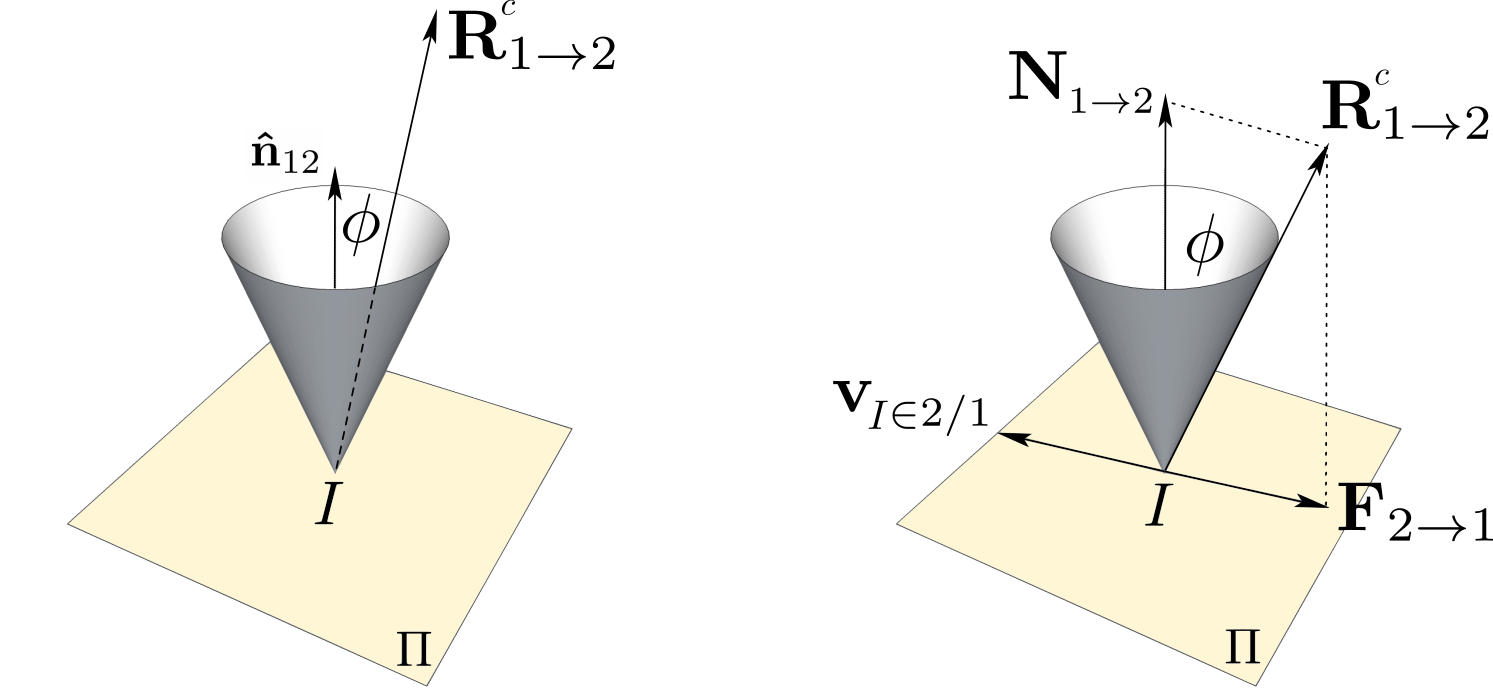
which shows that the contact force \(\bR^c_{1 \to 2}\) must lie inside the cone (known as the friction cone) of axis \((I, \bn_{12})\) and half-angle \(\phi\text{.}\) Angle \(\phi\) is the maximum inclination reached by the reaction force \(\bR^c_{1 \to 2}\) relative to the normal direction \(\bn_{12}\text{.}\) See Figure 10.3.8 (left).
Figure10.3.8.Friction cone
Remark10.3.9.
Coulomb laws, as stated above, are valid as long as \(\cB_1\) and \(\cB_2\) remain in contact: for unilateral constraints, one must guarantee that \(N_{1\to 2} \gt 0\text{.}\)
Remark10.3.10.
In the two cases stated above, two additional scalar equations are provided. These two additional scalar equations are generally sufficient to resolve the indetermination in the case of a single point of contact.
Remark10.3.11.
It is known that the coefficients of friction depends on the nature of the surface in contact (such as the type of materials, the state of roughness and lubrication of the surfaces) and on the magnitude of the slip velocity \(|\vel_{I\in 2 / 1} |\text{.}\) Various empirical laws can be found in the literature. It can be shown that \(\mu_k \lt \mu_s\text{.}\) However, one often assumes \(\mu_k = \mu_s\text{.}\) See Figure 10.3.8 (right).
Remark10.3.12.
In cases of multiple points of contact, these laws may not resolve the indetermination created by additional unknown components of the reaction forces.
Remark10.3.13.
It was pointed out by Painlevé 1 that in general the normal reaction \(N_{1\to 2}\) is a function of the coefficient of kinetic friction in addition to the variables which define the position and velocity of the rigid bodies. In case of slip between the bodies, whether at the start of the motion or not, some situations may arise, whereby either no motion or multiple motions may be possible with given initial conditions. This is typical of ill-posed problems and it shows that Coulomb laws must be used with care. This will be illustrated in Chapter 11.
Subsection10.3.3Rolling and Spinning Friction
In general, the moment at \(I\) is negligible as compared to the effect of sliding friction, and one often assumes \(\bM^c _{I, 1 \to 2} = {\bf 0}\text{.}\) When this assumption is too crude and leads to erroneous (and unacceptable) results, one can use additional laws to account for rolling and spinning friction. We denote \(\om_n \equiv \bom _{2 / 1 } \cdot \bn_{12}\) and \(\bom_t \equiv \bom_{2 / 1 } - \om_n \bn_{12}\) the spinning and rolling components of the angular velocity. We can state the following laws for rolling friction:
Coefficient \(h\) (which has the dimension of a length) is called coefficient of pivoting friction.
Subsection10.3.4Rigid Bodies in Line or Surface Contact
In the case of rigid bodies \(\cB_1\) and \(\cB_2\) in contact about a line or a surface \(\partial\cB_1 \cap \partial\cB_2\text{,}\) friction laws are more difficult to formulate. We may assume that at every point \(Q\in \partial\cB_1 \cap \partial\cB_2\) of the surface or line of contact, the local force density field \(\bof_{1 \to 2} ^c (Q)\) satisfies Coulomb laws of sliding friction. However it may not always be possible to derive a closed-form expression of the global effect of these contact forces due to body \(\cB_1\) on body \(\cB_2\text{.}\)
In case of relative slip at point \(Q\text{,}\) if the direction of the local slip velocity is known, then the local friction force may be determined in both direction and magnitude. Derivation of closed-form expression of \(\{ \cA^c_{\cB_1 \to \cB_2} \}\) is then possible as shown in the following example.
Example10.3.16.
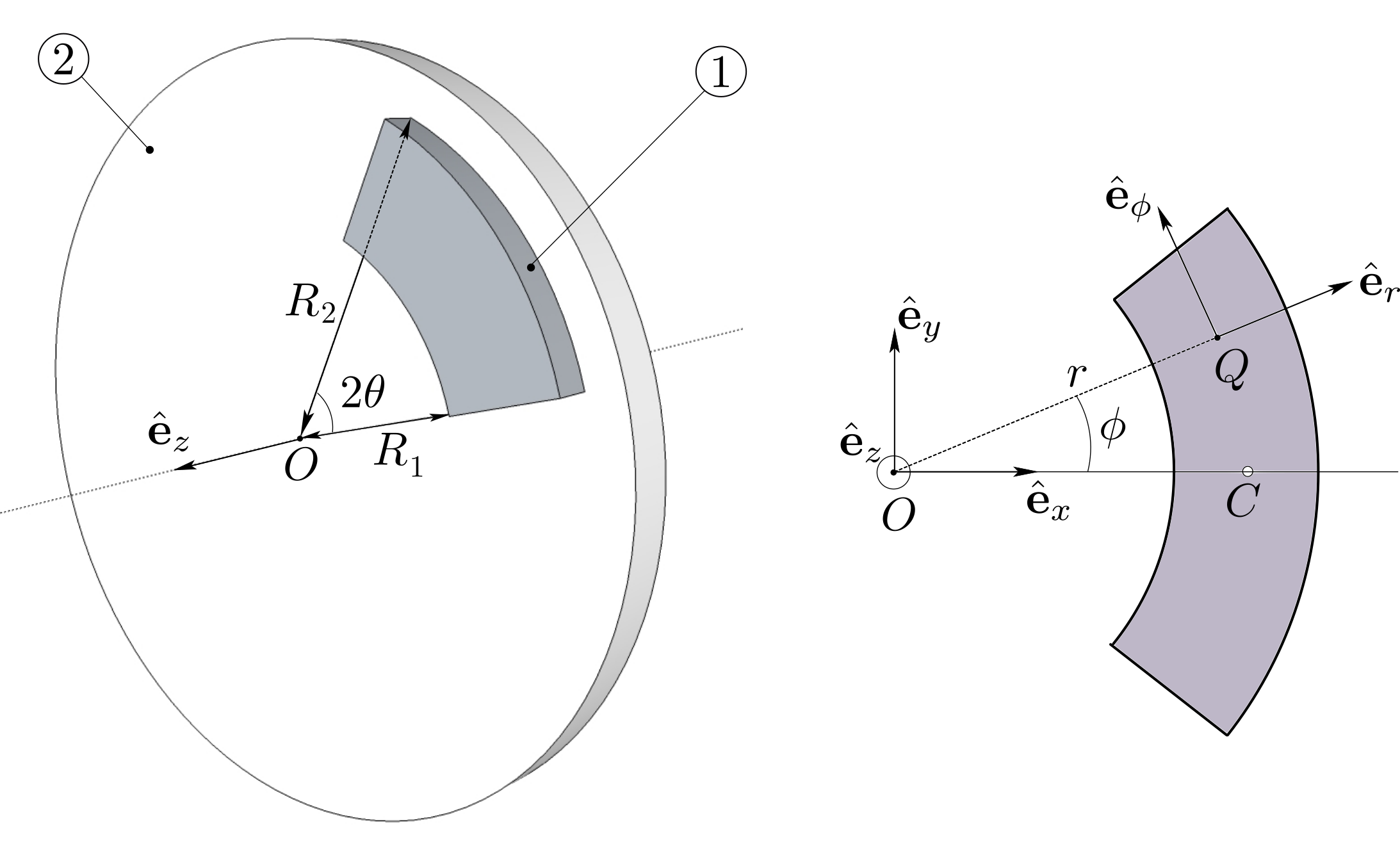
Consider the system disk-braking pad of an automobile’s wheel. Body \(\cB_2\) represents the brake disk rigidly connected to the rotating wheel. To stop the wheel, a braking pad \(\cB_1\) is forced to press against the surface of the disk. The pad is modeled as a disk sector of center \(O\text{,}\) angle \(2\theta\) and radii \(R_1\) and \(R_2\text{.}\) At a given instant, it is assumed that \(\cB_1\) exerts on \(\cB_2\) a uniform pressure \(p\) over the entire surface of contact. The contacting surfaces are characterized by a kinetic friction coefficient \(\mu\text{.}\) Find the expression of the contact action screw \(\{ \cA^c_{\cB_1 \to \cB_2} \}\) at this instant as a function of pressure \(p\text{,}\)\(\mu\) and the geometric parameters.
Figure10.3.17.
Solution.
Denote the position of contact point \(Q\) by its polar coordinates \((r,\phi)\text{.}\) At a given instant the velocity of point \(Q\) is given by \(\vel_{Q\in 2/1} = r\om_{2/1} \be_\phi\text{,}\) assuming that \(\bom_{2/1} = \om_{1/2} \be_z\text{.}\) The local friction force will be collinear and opposed to the \(\vel_{Q\in 2/1}\text{,}\) and its magnitude is \(\mu p\text{.}\) The contact force \(d\bR_{1\to 2}^c\) acting on area \(dA = r dr d\phi\) is composed of a normal contribution \(-p dA \, \be_z\) and a tangential contribution \(- \mu p dA \be_\phi\text{:}\)
\begin{equation*}
d \bR_{1\to 2}^c = - p (\be_z + \mu \, \be_\phi ) dA
\end{equation*}
using \(|OC| = (2/3) [(R^3_2 -R^3_1)/ (R^2_2 -R^2_1)] \frac{\sin\theta}{\theta}\text{.}\) This gives the final expression of \(\{ \cA^c_{\cB_1 \to \cB_2} \}\)
It is apparent that a closed-form expression of \(\{ \cA^c_{\cB_1 \to \cB_2} \}\) of Example 10.3.16 was feasible thanks for the fact that both the normal force \(N_{1\to 2}\) and the slip-velocity were known. But in general, this is not expected, and this makes the expression of \(\{ \cA^c_{\cB_1 \to \cB_2} \}\) very difficult to obtain. If, however, the contact is assumed frictionless, that is, if \(\mu_k = \mu_s = 0\) is assumed, then the local contact force (per unit area or unit length) \(\bof_{1 \to 2} ^c (Q)\) must satisfy:
where \(\bn_{12}\) is the local unit normal at the contact point. The contribution of the tangential force density is then neglected. This local assumption does result in some significant simplifications for the global effect of contact forces: the contact action screw \(\{ \cA^c_{\cB_{1} \to \cB_{2}} \}\) will in general have fewer than six unknown resultant and moment components. This assumption is in general sufficient to resolve the indetermination generally encountered in multibody dynamics.
This is illustrated with the following example.
Example10.3.18.
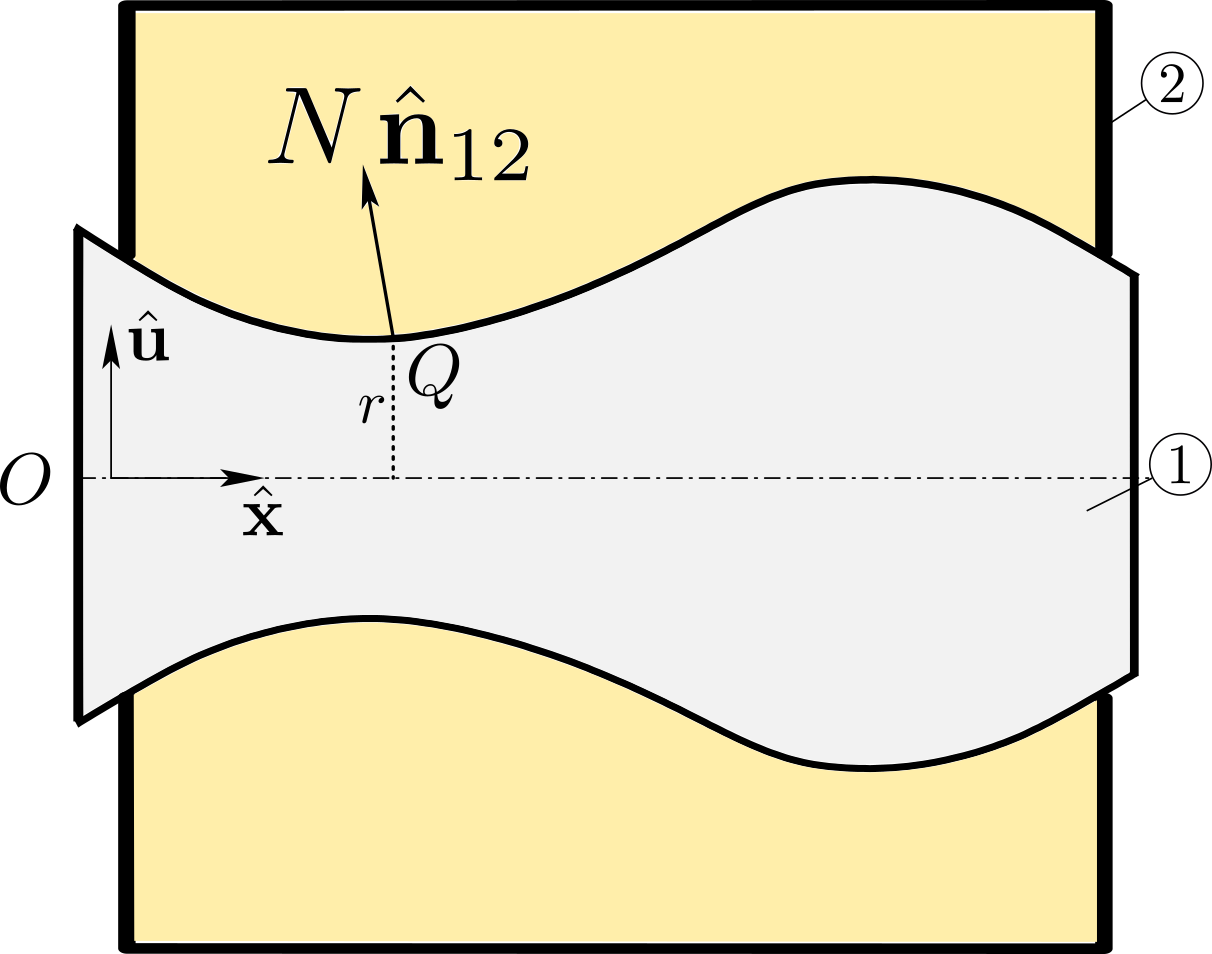
Consider the case displayed in Figure 10.3.19 of two bodies \(\cB_1\) and \(\cB_2\) constrained in such a way that two coinciding axisymmetric surfaces are in relative rotation about a common axis \(\Delta (O,\bx)\text{.}\) Assume that the contact is frictionless. Show that the moment of the contact forces about any point \(O\) of \(\Delta\) must satisfy
with \(\bx\) a unit vector along \(\Delta\text{.}\)
Figure10.3.19.
Solution.
Define unit vectors \((\bu, \bv= \bx\times\bu)\) with \(\bu\) normal to \(\bx\) and in the cross-sectional plane containing \(\Delta\) and contact point \(Q\text{.}\) The contact being frictionless, the local contact force (per unit area) is directed along the unit normal \(\bn_{12}\) to the surface \(\cS= \partial \cB_1 \cap \partial \cB_2\text{:}\)
In Section 10.4, we show similar properties for the kinematic lower pairs of rigid bodies described in Chapter 7. Furthermore, we will see in Chapter 12 how to determine the specificity of frictionless contact action screws in a systematic way by using energy arguments.