In this section, we illustrate the determination of kinematic screws with three examples.
Example5.4.1.
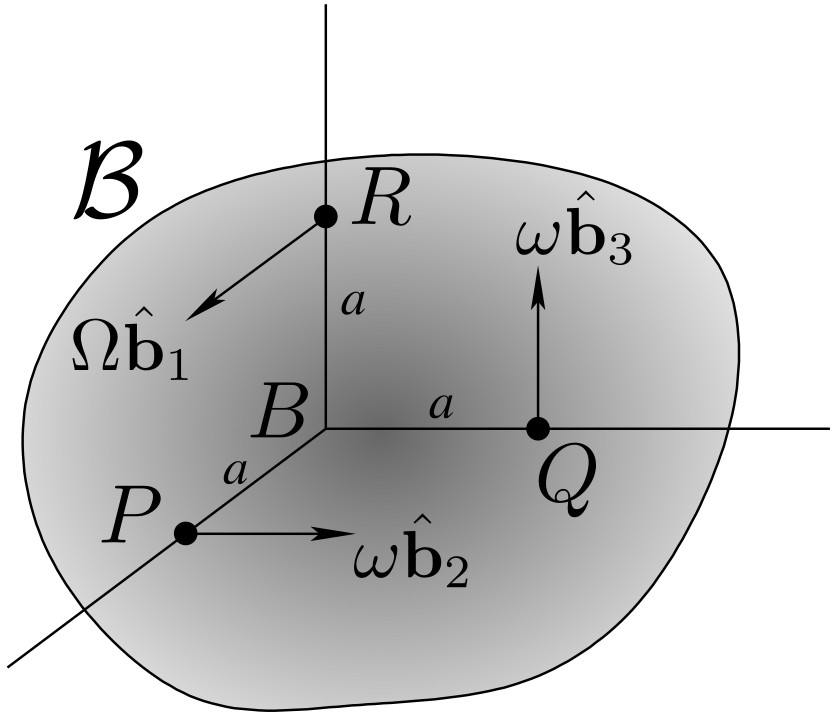
A rigid body \(\cB (B, \bhb_1, \bhb_2, \bhb_3)\) is in motion relative to a referential \(\cE\text{.}\) At a particular instant in time, its kinematic screw can be written in the following form
where points \(P\text{,}\)\(Q\) and \(R\) are defined by \(\br_{BP} = a \bhb_1\text{,}\)\(\br_{BQ} = a \bhb_2\) and \(\br_{BR} = a\bhb_3\) (\(\om\) and \(\Om\) are two non-zero real parameters). See Figure 5.4.2.
Figure5.4.2.
Find the velocity \(\vel_{B/\cE}\text{.}\) Then find the instantaneous screw axis of \(\cB\) at this instant. Under what condition is body \(\cB\) in instantaneous rotation?
Solution.
The velocity of point \(B\) is found by summing the three contributions to \(\left\{ \cV _{\cB/ \cE} \right\}\)
which becomes zero when the condition \(\om = -2 \Om\) is satisfied. In this case, body \(\cB\) is in instantaneous rotation about axis \(\Delta\text{.}\)
Example5.4.3.
Consider two rigid bodies \(\cA\) and \(\cB\) in rotation about parallel axes \((A, \be_3)\) and \((B, \be_3)\text{,}\) respectively, relative to a referential \(\cE (O, \be_1,\be_2,
\be_3)\text{.}\) See Figure 5.4.4. Denote by \(\bom_{\cA/\cE}= \om_A \be_3\) and \(\bom_{\cB/\cE}= \om_B \be_3\) their angular velocities. The position of \(A\) and \(B\) are given by \(\br_{OA}= a \be_1\) and \(\br_{OB} = b \be_2\text{.}\) Assume \(\om_B \neq \om_A\text{.}\)
Figure5.4.4.
Find the kinematic screw \(\{ \cV_{\cB/\cA} \}\text{.}\)
Show that the motion \(\cB/\cA\) admits an instantaneous axis of rotation \(\Delta\text{,}\) that is,
We note that the pitch associated with motion \(\{ \cV_{\cB/\cA} \} \) is \(p =0\) since we have \(\bom_{\cB/\cA} \cdot\vel_{B/\cA} =0\text{.}\) Hence, this motion admits an instantaneous axis of rotation \(\Delta\text{.}\) This implies that there exists a point \(I\) such that \(\vel_{I\in\cB/\cA} = \bze\text{.}\)
To find the point \(I\) of \(\Delta\) lying in the plane \((O,\be_1,\be_2)\text{,}\) we need to solve for vector \(\br_{BI}\) solution of
after accounting for \(\be_3\cdot\br_{BI} =0\text{.}\) This gives the position of point \(I\text{:}\)
\begin{equation*}
\br_{BI} = \frac{\om_A}{\om_B -\om_A} (b\be_2 -a \be_1)
\end{equation*}
This result shows that point \(I\) lies on line \(AB\) (if \(\om_B \lt \om_A\text{,}\)\(I\) lies between points \(A\) and \(B\)). Note that if \(\om_A\) and \(\om_B\) are constant, axis \(\Delta\) is fixed relative to \(\cE\text{.}\) Hence, \(\Delta\) is fixed neither in \(\cA\) nor \(\cB\text{,}\) as expected.
Example5.4.5.
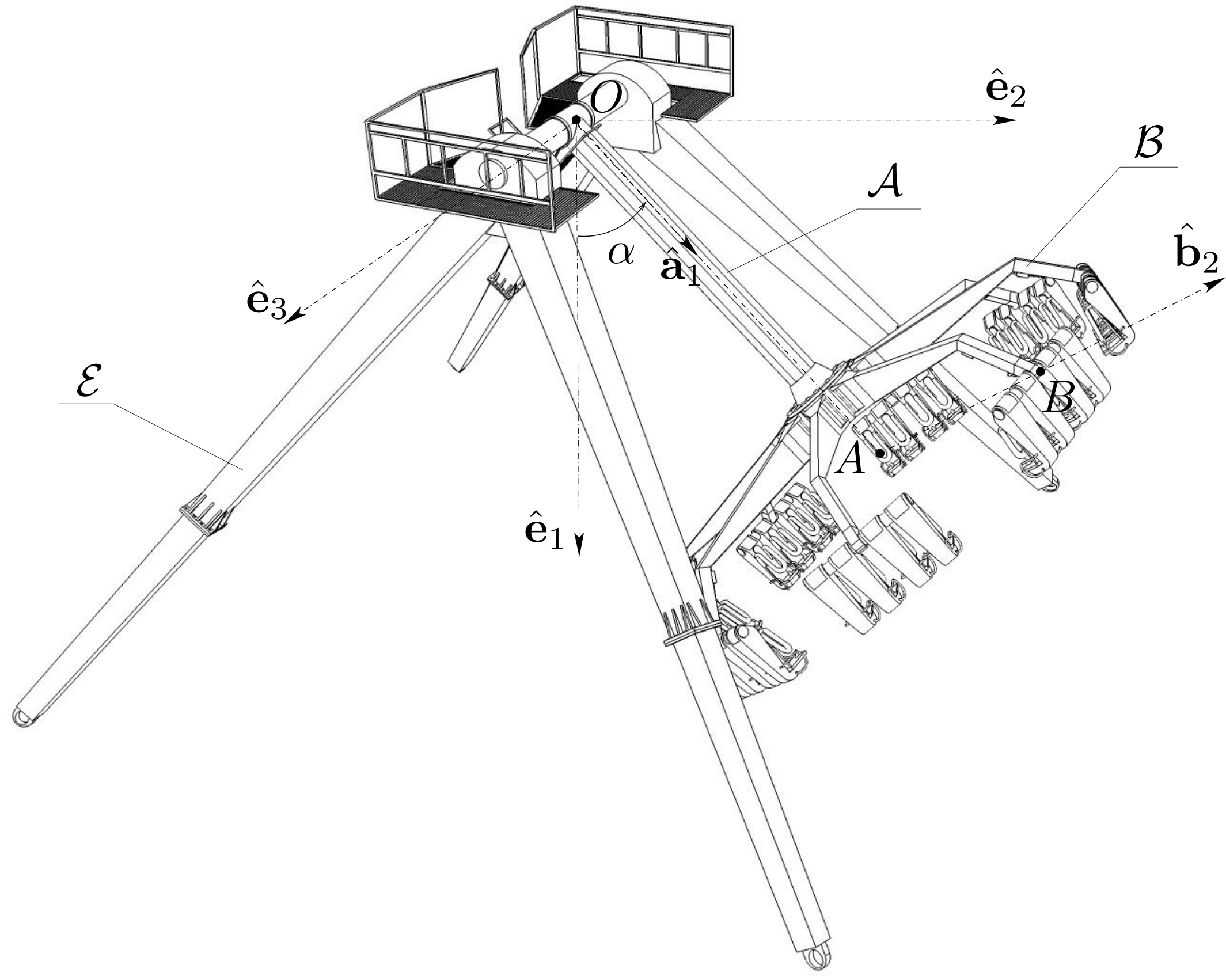
Figure 5.4.6 shows a sketch of an amusement park ride known as the Afterburner (designed by KMG). It consists of a pendulum arm \(\cA\) supported by two A-frames fixed in a referential \(\cE\text{.}\) The arm can rotate about a fixed horizontal axis. A rotating hub \(\cB\) is connected at the end of the arm: it supports six gondolas and can seat 24 passengers. The hub is free to rotate about the axis of arm \(\cA\text{.}\)
Figure5.4.6.
Referential \(\cE\) is defined as \((O, \be_1, \be_2, \be_3)\) where unit vector \(\be_3\) is chosen as the direction of the axis of rotation of the arm, and \(\be_1\) is directed downward along the vertical. The arm \(\cA\) is defined as \((O, \bha_1 , \bha_2 , \bha_3 = \be_3)\text{.}\) Point \(A\) is located on the axis of the arm with \(\br_{OA} = a \bha_1\text{.}\) Finally the hub \(\cB\) is defined as \((A, \bhb_1 = \bha_1 , \bhb_2 , \bhb_3)\text{.}\) The location of a typical passenger is defined by point \(B\) with \(\br_{AB} = R \bhb_2\text{.}\) Both \(a\) and \(R\) are constant lengths. The position of referentials \(\cA\) and \(\cB\) is defined by the rotation \(\cR_{\al, \be_3}\) of angle \(\alpha (t)\) which basis \((\be_1, \be_2, \be_3)\) to basis \((\bha_1 , \bha_2 , \bha_3 )\text{,}\) followed by the rotation \(\cR_{\beta, \bha_1}\) of angle \(\beta (t)\) which basis \((\bha_1 , \bha_2 , \bha_3 )\) to basis \((\bhb_1 , \bhb_2 , \bhb_3)\text{.}\)
Sketch the rotation diagrams between bases \((\be_1, \be_2, \be_3)\text{,}\)\((\bha_1 , \bha_2 , \bha_3)\) and \((\bhb_1 , \bhb_2 , \bhb_3)\text{.}\) Then find the corresponding angular velocities \(\bom_{\cA/\cE}\) and \(\bom_{\cB/\cE}\text{.}\)
Find expressions of the kinematic screws \(\{ \cV_{\cA/\cE} \}\) and \(\{ \cV_{\cB/\cE} \}\text{.}\) Then find the velocity of point \(B\text{.}\)
Find component \(\be_1 \cdot\ba_{B/\cE}\) of the acceleration of \(B\text{.}\)
Solution.
The rotation diagrams shown in Figure 5.4.7 are defined from the following sequence of rotations
To find the expression of kinematic screw \(\{ \cV_{\cA/\cE} \}\text{,}\) we need angular velocity \(\bom_{\cA/\cE}\) and the velocity of a point attached to \(\cA\text{.}\) Choosing point \(O\) we obtain
representative a body in rotation. Similarly, to find the expression of kinematic screw \(\{ \cV_{\cB/\cE} \}\text{,}\) we need the velocity of a point attached to \(\cB\text{:}\) choosing point \(A\) we obtain