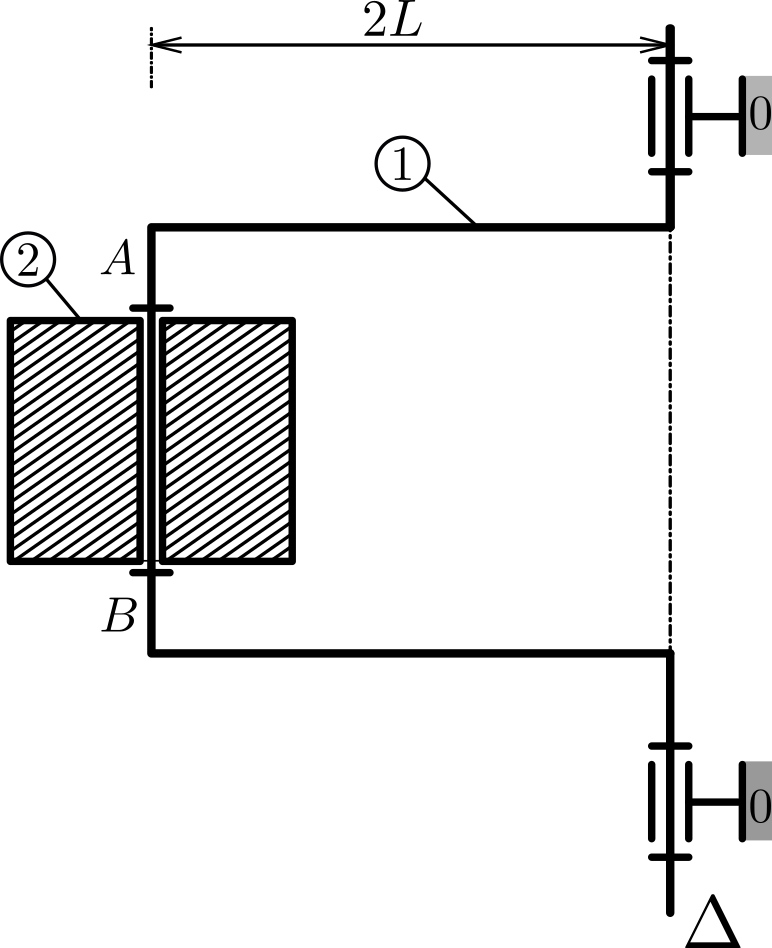
a. The form of inertia matrix \([\cI_{G,2}]_{b_2}\) on basis \(b_2 (\bx_2, \by_2 = \by_1 , \bz_2)\) can be justified by examining the symmetries of body 2: two plane symmetries can be found, the symmetry w.r.t. plane \((G, \bx_2 ,\bz_2)\) and the symmetry w.r.t. plane \((G, \bx_2 ,\by_1)\text{.}\) All products of inertia must be zero on this basis. We expect \(A_2 \neq B_2 \neq C_2\text{.}\)
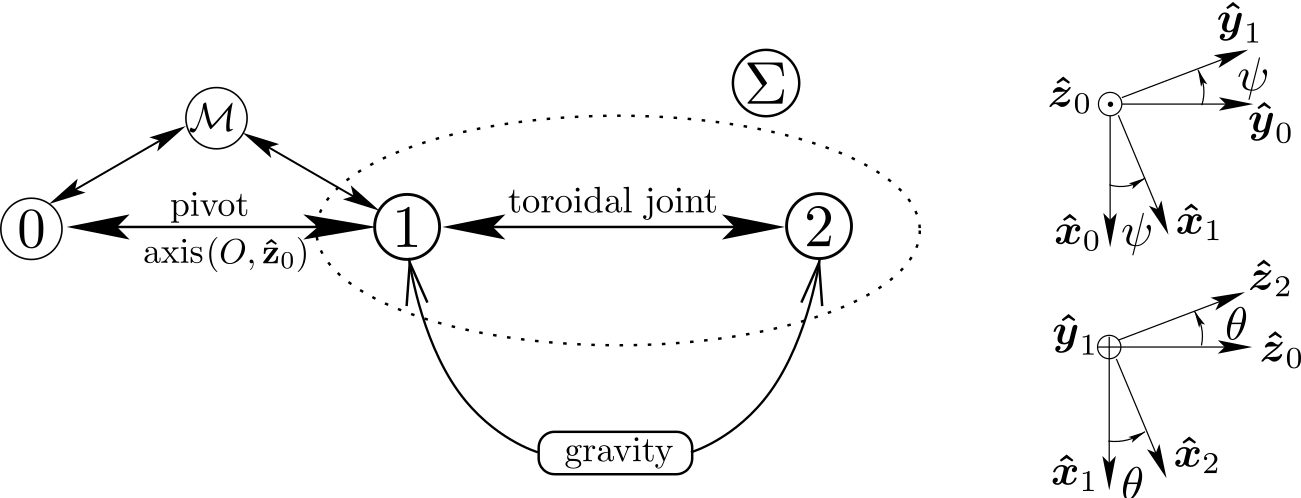
b. We sketch a diagram showing all interconnections/interactions. We also sketch the rotation diagrams for convenience. See
Figure 12.8.3.
The two equations extracted from the FTD are found by exploiting the two specific vanishing components of the contact actions screws \(\{\cA_{0\to 1} \}^c\) and \(\{\cA_{1\to 2} \}^c\text{:}\)
\begin{equation*}
\bM_{O, 0\to 1}^c \cdot \bz_0 =0, \qquad
\bM_{O, 1\to 2}^c \cdot \by_1 =0
\end{equation*}
The first equation is found by applying
\begin{equation*}
\bM_{O, \bSi\to \Si}^c \cdot \bz_0 = \bD_{O, \Si/0}\cdot \bz_0 = \cC
\end{equation*}
This causes all actions internal to system \(\Sigma\) to vanish. The contribution of gravity also vanishes.
For the second equation, we apply the FTD on body 2 as follows:
\begin{equation*}
\bM_{O, \bar{2}\to 2}^c \cdot \by_1 = \bD_{O, 2/0}\cdot \by_1
\end{equation*}
For the first equation, we find the \(z_0\) component of dynamic moment \(\bD_{O, \Sigma /0}\) as follows:
\begin{equation*}
\bD_{O, \Si/0}\cdot \bz_0 = \bD_{O, 1/0}\cdot \bz_0 + \bD_{O, 2/0}\cdot \bz_0
= \frac{d}{dt}\left( \bH_{O, 1/0}\cdot \bz_0 + \bH_{O, 2/0}\cdot \bz_0 \right)
\end{equation*}
with \(\bH_{O, 1/0}\cdot \bz_0 = I_1 \dpsi\text{.}\) Angular momentum \(\bH_{O, 2/0}\) of body 2 about \(O\) is found from angular momentum \(\bH_{G, 2/0}\) about \(G\)
\begin{equation*}
\bH_{O, 2/0}\cdot \bz_0 = (\bH_{G, 2/0}+ \br_{OG}\times m_2 \vel_{G/0})\cdot \bz_0
\end{equation*}
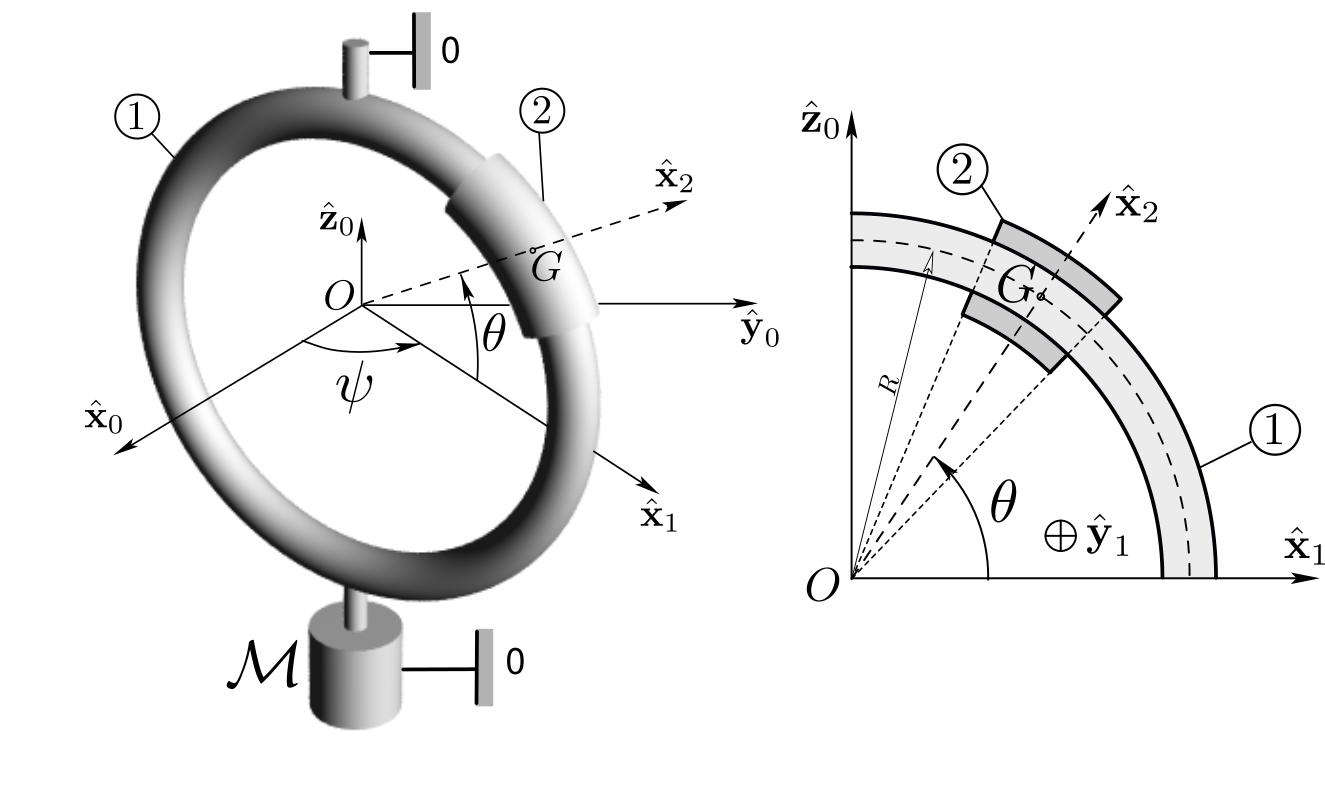
using velocity
\begin{equation*}
\vel_{G/0} = d(R\bx_2)/dt = R(\dpsi \cos \te \by_1 + \dte \bz_2)
\end{equation*}
and angular momentum
\begin{equation*}
\bH_{G, 2/0} = \cI_{G,2}(\bom_{2/0}) = A_2 \dpsi \sin\te \bx_2 -B_2\dte \by_1 + C_2 \dpsi \cos\te \bz_2
\end{equation*}
So we find
\begin{equation*}
\bH_{O, 2/0} = A_2 \dpsi \sin\te \bx_2 -(B_2+mR^2) \dte \by_1 +
(C_2+mR^2) \dpsi \cos\te \bz_2
\end{equation*}
Note that this last result could be found by find operator $\cI_{G,2}$ with the parallel axis theorem. Now we can find the \(\bz_0\) component:
\begin{equation*}
\bH_{O, 2/0} \cdot \bz_0 = [ A_2 \sin^2 \te + (C_2 +m_2 R^2) \cos^2 \te]\dpsi
\end{equation*}
finally leading to equation
\begin{equation*}
\boxed{
\frac{d}{dt}\left[ I_1 + A_2 \sin^2 \te + (C_2 +m_2 R^2) \cos^2 \te\right]\dpsi
= \cC
}
\qquad{(1)}
\end{equation*}
For the second equation, we can express dynamic moment \(\bD_{O , 2/0} \cdot \by_1\) as
\begin{equation*}
\bD_{O , 2/0} \cdot \by_1 = \frac{d}{dt} \left( \by_1 \cdot \bH_{O , 2/0} \right)
+ \dpsi \bx_1 \cdot \bH_{O, 2/0} = \bM_{O, \bar{2}\to 2}^c \cdot \by_1 = m_2 gR\cos\te
\end{equation*}
This avoids seeking all components of \(\bD_{O , 2/0}\text{.}\) We find
\begin{equation*}
\by_1 \cdot \bH_{O , 2/0} = - (B_2 +m_2 R^2) \dte
\end{equation*}
and
\begin{equation*}
\bx_1 \cdot \bH_{O, 2/0} = (A_2 -C_2-m_2R^2) \dpsi \sin\te\cos\te
\end{equation*}
This leads to the second equation:
\begin{equation*}
\boxed{
- (B_2 +m_2 R^2) \ddte + (A_2 -C_2-m_2 R^2) \dpsi^2 \sin\te\cos\te = m_2 gR\cos\te}
\qquad{(2)}
\end{equation*}
c. To apply the KET to system \(\Si\) we write
\begin{equation*}
\frac{d}{dt} (\kin_{1/0}+ \kin_{2/0}) = \Pow_{\bSi \to \Si /0} + \Pow_{1\leftrightarrow 2}
\end{equation*}
with kinetic energies
\begin{equation*}
\kin_{1/0}= \half I_1 \dpsi^2
\end{equation*}
and
\begin{align*}
\kin_{2/0} \amp = \half m_2 \vel_{G/0}^2 + \half \bom_{2/0} \cdot \bH_{G, 2/0}\\
\amp = \half m_2 R^2 (\dte^2 + \dpsi^2 \cos^2 \te) + \half (A_2 \dpsi^2 \sin^2 \te + C_2 \dpsi^2 \cos^2 \te + B_2 \dte^2).
\end{align*}
Since the joint \(0\leftrightarrow 1\) is ideal, we have \(\Pow^c_{0\leftrightarrow 1} =0\) leading to the expression of total external power
\begin{equation*}
\Pow_{\bSi \to \Si /0} = \cC \dpsi - m_2 g R \dte \cos\te
\end{equation*}
Also internal power \(\Pow^c_{1\leftrightarrow 2}\) vanishes, since the joint \(1\leftrightarrow 2\) is ideal. This gives the final equation
\begin{equation*}
\boxed{
\frac{d}{dt} \left\{ \half(m_2 R^2 +B_2)\dte^2 + \half (I_1 +
A_2 \dpsi^2 \sin^2 \te + C_2 \dpsi^2 \cos^2 \te + m_2 R^2 \cos^2\te)\dpsi^2 \right\}
= \cC \dpsi - m_2 g R \dte \cos\te
}
\end{equation*}
We know that the KET applied to system \(\Si\) is equivalent to the sum of following equations
\begin{equation*}
\{\cA_{ \bar{1}\to 1} \} \cdot \{ \cV_{1/0} \} = \{ \cD_{1/0} \}\cdot \{ \cV_{1/0} \}
\qquad{(3)}
\end{equation*}
\begin{equation*}
\{\cA_{ \bar{2}\to 2} \} \cdot \{ \cV_{2/0} \} = \{ \cD_{2/0} \}\cdot \{ \cV_{2/0} \}
\qquad{(4)}
\end{equation*}
with the kinematic screws given by
\begin{equation*}
\{ \cV_{2/0} \} = \left\{
\begin{array}{c}
(\dpsi \bz_0 -\dte \by_1) \\
\bze
\end{array}
\right\}_O
\qquad
\{ \cV_{1/0} \} = \left\{
\begin{array}{c}
\dpsi \bz_0 \\
\bze
\end{array}
\right\}_O
\end{equation*}
We add equations (3) and (4) to get
\begin{equation*}
\dpsi \bz_0 \cdot \bM_{O, \bar{1}\to 1} +
(\dpsi \bz_0 -\dte \by_1) \cdot \bM_{O, \bar{2}\to 2}
=
\dpsi \bz_0 \cdot \bD_{O, 1/0}+
(\dpsi \bz_0 -\dte \by_1) \cdot \bD_{O, 2/0}
\end{equation*}
It is now easy to see that the KET applied to system \(\Si\) is equivalent to
\begin{equation*}
\boxed{
(1) \times \dpsi + (2) \times (-\dte) = 0
}
\end{equation*}