A screw \(\{ \cV \}\) is said to be a couple if its resultant \(\bV\) is zero and if there exists a point \(A\) whose moment \(\bvv_A\) is non zero.
Hence the corresponding vector field \(\bvv_P\) is constant, that is, independent of point \(P\text{:}\)\(\bvv_P = \bvv_A\) for all points.
Definition4.4.2.Slider.
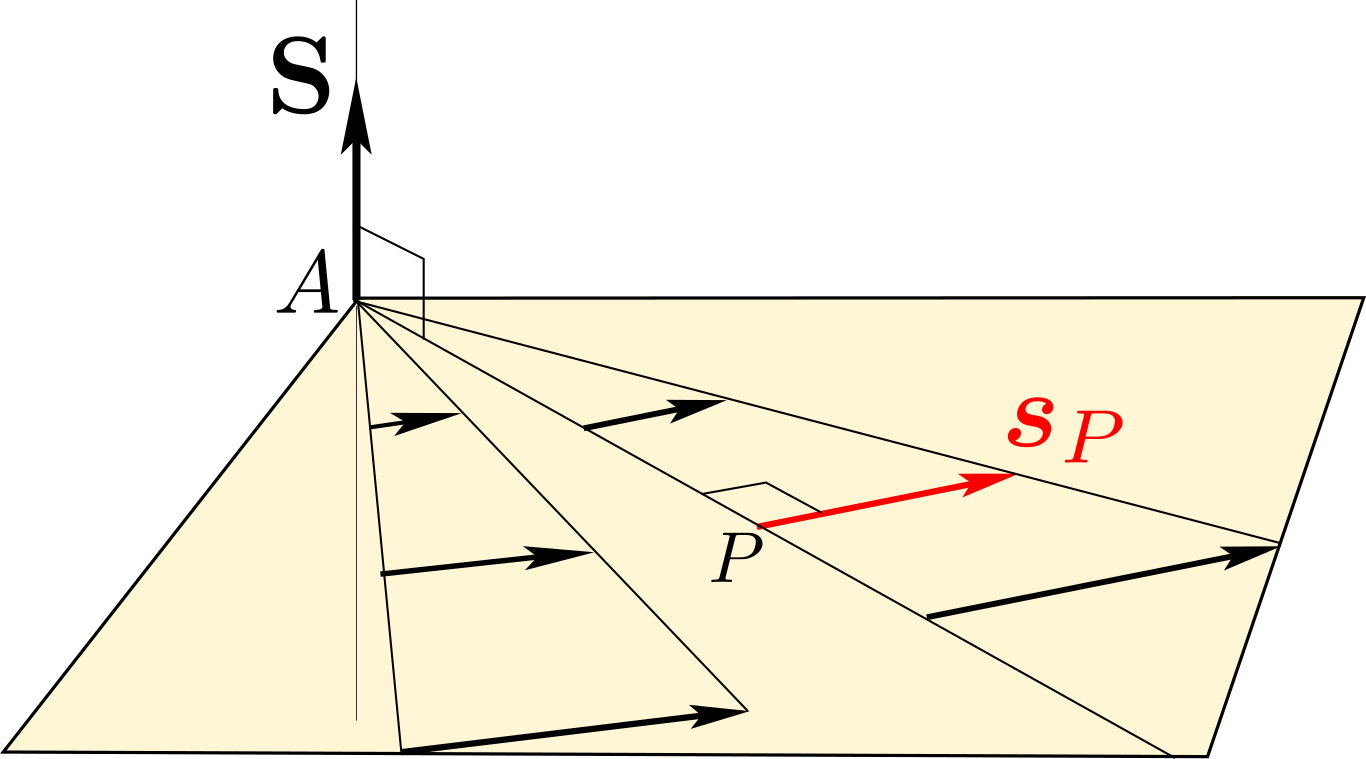
A screw \(\{ \cS \}\) is said to be a slider if its resultant \(\bS\) is non zero, and if there exists a point \(A\) of \(\cE\) about which moment \({\bf s}_A = {\bf 0}\text{.}\) The moment of a slider about any point \(P\) is then given by \(\bs_P = \bS \times \br_{AP}\text{:}\)
This implies that the moment of slider \(\{\cS\}\) about any point of line \(\Delta = (A , \bS)\) passing through \(A\) (for which \(\bs_A =0\)) and parallel to vector \(\bS\) is also zero. \(\Delta\) is called the axis of slider \(\{\cS\}\text{.}\)Figure 4.4.3 shows the distribution of the vector field about \(\Delta\text{.}\)
Figure4.4.3.Geometry of a slider about its axis \(\Delta\text{.}\)
Corollary4.4.4.Correspondence between sliders and bound vectors.
Given a vector \(\bS\)bound at point \(A\text{,}\) denoted \((A, \bS)\text{,}\) recall that the moment about point \(P\) of vector \(\bS\) is defined as the vector \(\bS \times \br_{A P}\text{.}\) The resulting vector field \(P\in \cE\mapsto \bS \times \br_{A P}\) clearly defines a slider \(\{ \cS \}\text{.}\) Hence there exists a one-to-one correspondence between sliders and bound vectors.
If we are given a screw $\{\cV\}$ of non-zero resultant $\bV$, how can we quickly find out whether $\{\cV\}$ is a slider or? This theorem provides an answer to this question.
Theorem4.4.5.Is a Screw \(\{\cV\}\) a Slider?
Consider a screw \(\{\cV\}\) of non-zero resultant $\bV$. Then \(\{\cV\}\) is a slider if and only if the scalar invariant \(\bV \cdot \bvv_O\) vanishes.
Proof.
Four cases can be found to satisfy the equation \(\bV \cdot\bvv_P = 0\text{.}\)
Case 1: if \(\bV = 0\) and there exists a point \(A\) such that \(\bvv_A = \bze\text{,}\) then screw \(\{\cV\}\) is the screw \(\{ 0\}\text{.}\)
Case 2: if \(\bV = \bze\) and if there exists a point \(A\) such that \(\bvv_A \neq \bze\text{,}\) then the screw is a couple.
Case 3: if \(\bV \neq \bze\) and if there exists a point \(A\) such that \(\bvv_A = \bze\text{:}\) then the screw is a slider along the axis \(\Delta = (A, \bV)\text{.}\)
Case 4: if \(\bV \neq \bze\) and if there exists a point \(A\) such that \(\bvv_A \neq \bze\text{,}\) then the set of points \(P\) satisfying \(\bV \times \br_{PA} =\bvv_A\) is not empty, since \(\bvv_A\) and \(\bV\) are orthogonal. The screw is then necessarily a slider. To find this set of points (the axis of the slider) we must solve the vector equation \(\bV \times \br_{AP} = -\bvv_A\text{.}\) If we find a particular solution \(\br_{AB}\text{,}\) then the general solution is necessarily given by \(\br_{AP} = \br_{AB} + \lambda \bV\text{.}\) A particular solution orthogonal to \(\bV\) is found by cross-multiplying both sides of this equation by \(\bV\text{:}\)\(\bV\times(\bV \times \br_{AB}) = - \bV\times\bvv_A\text{.}\) After expanding the triple product, 1 we find the position of point \(B\) as given by: \(\br_{AB} = (\bV\times \bvv_A) / \bV^2\text{.}\) We conclude that the screw is a slider of axis \(\Delta = (B, \bV)\text{.}\) We recover case 3 if \(\bvv_A = \bze\text{.}\)
Hence to show that a screw is a slider it is necessary and sufficient to show that its resultant \(\bV\) is non-zero and its scalar invariant \(\bV\cdot \bvv_P\) is zero.