A rigid body
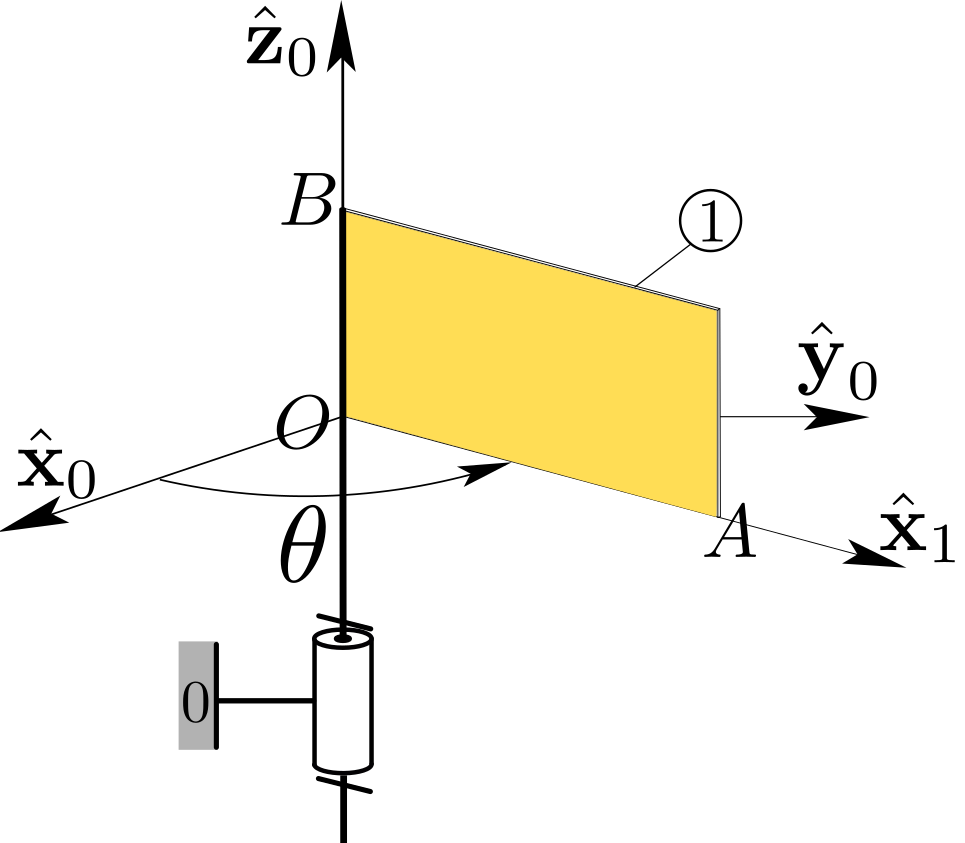
1 is constrained to rotate about a fixed axis \((O,\bz_0)\) of a referential 0. Body 1 is in the shape of a rectangular plate (of negligible thickness) of uniform mass \(m\text{,}\) with \(\br_{OB} = 2b \bz_0\) and \(\br_{OA} = 2a \bx_1\text{.}\) See Figure 9.9.2.- Determine the inertia operator \(\cI_O\) about point \(O\text{.}\)
- Determine the kinetic \(\{ \cH _{1 / 0} \}\) and dynamic \(\{ \cD _{1/0} \}\) screws resolved about point \(O\) in terms of \(a\text{,}\) \(b\text{,}\) \(\te\) and its time-derivatives.
- Determine the kinetic energy \(\kin_{1/0}\text{.}\)
Solution.
-
The position of mass center \(G\) is defined on Cartesian axes \((O, \bx_1, \by_1=\bz_0\times\bx_1, \bz_0)\) attached to body
1by the vector \(\br_{OG}= a\bx_1 +b\bz_0\text{.}\)We may find a representation of \(\cI_{O}\) on basis \(b_1 (\bx_1 , \by_1, \bz_0)\) (with \(\by_1 = \bz_0 \times \bx_1\)). On this basis the inertia matrix takes the form\begin{equation*} [\cI_O]_{b_1} = \begin{bmatrix} I_{Ox} \amp 0 \amp I_{Oxz} \\ 0 \amp I_{Oy} \amp 0 \\ I_{Oxz} \amp 0 \amp I_{Oz} \end{bmatrix}_{b_1} \end{equation*}where \(I_{Ox} = \int z^2 dm\text{,}\) \(I_{Oz} = \int x^2 dm\text{,}\) \(I_{Oy}= I_{Ox}+ I_{Oz}\text{,}\) and \(I_{Oxz} = -\int xz dm\text{.}\) Here \((x,z)\) represent the Cartesian coordinates of a generic point \(P\) of body1relative to axes \((O,\bx_1,\bz_0)\text{.}\)The values of \(I_{Ox}\text{,}\) \(I_{Oz}\text{,}\) and \(I_{Oxz}\) are found by a straightfoward application of the parallel axis theorem (the corresponding values about mass center \(G\) can be found in Section B.1):\begin{equation*} I_{Ox} =\tfrac{4}{3}m {b^2}, \quad I_{Oz} =\tfrac{4}{3} m {a^2}, \quad I_{Oxz}= -mab \end{equation*} - First we find the angular momentum about \(O\) by applying formula (9.6.1)\begin{equation*} \bH_{O} = \cI_{O} (\bom) = \dte ( I_{Oxz} \bx_1 + I_{Oz} \bz_0) = m a \dte ( -b \bx_1 + \tfrac{4}{3}a \bz_0) \end{equation*}This gives the kinetic screw in the following form, using the expression of the linear momentum \(m a \dte \by_1\text{:}\)\begin{equation*} \{ {\cal H} _{1 / 0 } \} =\begin{Bmatrix} m a \dte \by_1 \\ \quad\\ m a \dte ( -b \bx_1 + \tfrac{4}{3} a \bz_0) \end{Bmatrix}_O \end{equation*}Next, we find the dynamic moment about about \(O\text{:}\) we use (9.3.4) (choosing point \(O\) for point \(A\)):\begin{equation*} \bD_O = \frac{d\bH_{O}}{dt} = m a \ddte ( -b \bx_1 + \tfrac{4}{3}a \bz_0) - m ab \dte^2 \by_1 \end{equation*}leading to the expression\begin{equation*} \{ {\cal D} _{1 / 0 } \} = \begin{Bmatrix} m a (\ddte \by_1 - \dte^2 \bx_1) \\\quad\\ m a ( -b\ddte \bx_1 -b \dte^2 \by_1 + \tfrac{4}{3} a\ddte \bz_0) \end{Bmatrix}_O \end{equation*}
- According to formula (9.7.1) (choosing point \(O\) for point \(B\)), the kinetic energy of body
1is found to be\begin{equation*} \kin_{1/0} = \half \bom \cdot \cI_O (\bom) = \tfrac{2}{3} m {a^2}\dte^2 \end{equation*}