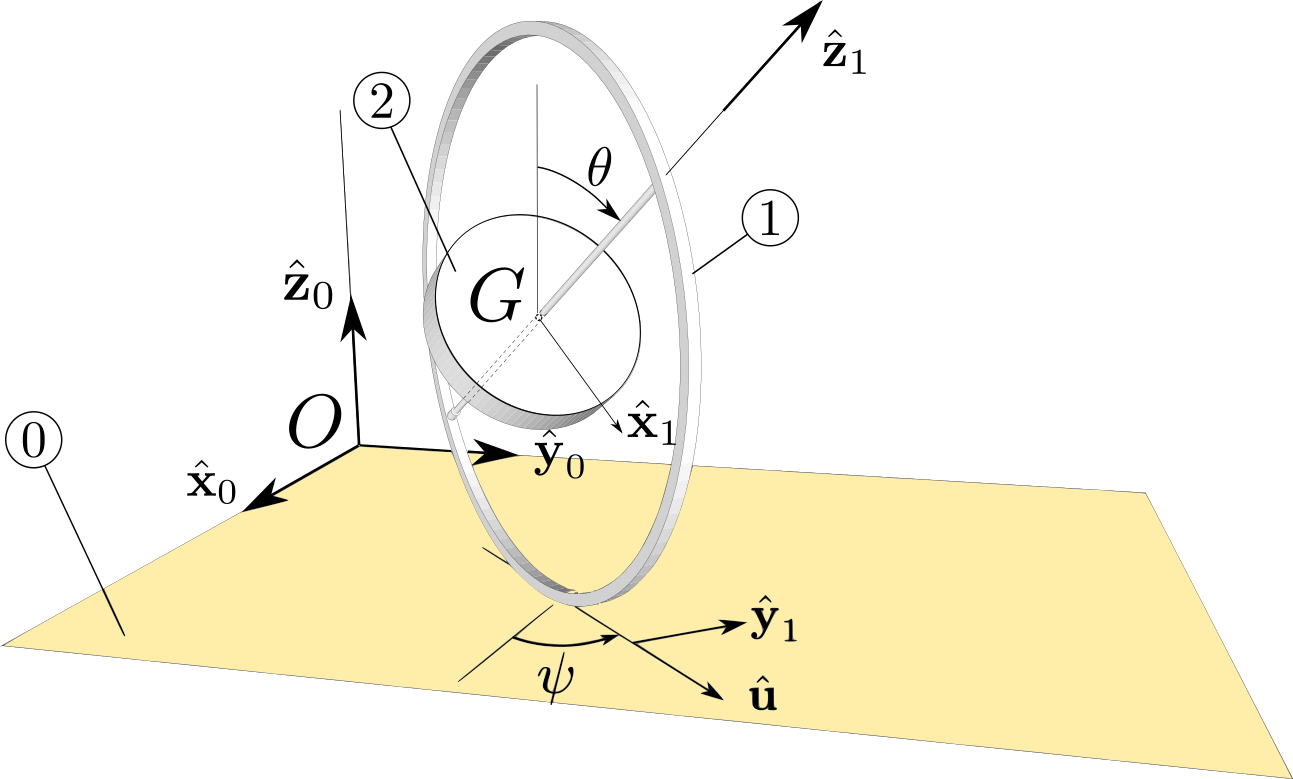
b. We assume that the coordinates
\((x,y,\psi,\theta, \phi)\) satisfy the assumption
(13.1.2). We then find the kinematic screws
\(\{\cV_{1/0} \}\text{,}\) \(\{\cV_{2/1}\}\) and
\(\{ \cV_{2/0} \}\)
\begin{equation*}
\{\cV_{1/0} \} = \begin{Bmatrix} \dpsi \bz_0 + \dte \by_1 \\\\ \dx \bx_0 +\dy \by_0 \end{Bmatrix}_G
=\begin{Bmatrix} \dpsi \bz_0 + \dte \by_1 \\\\ \dx \bx_0 +\dy \by_0 -R \dte \bu \end{Bmatrix}_I
\end{equation*}
\begin{equation*}
\{\cV_{2/1} \} = \begin{Bmatrix} \dphi \bz_1 \\\\ \bze \end{Bmatrix}_G
\qquad
\{\cV_{2/0} \} = \{\cV_{2/1} \}+\{\cV_{1/0} \} =
\begin{Bmatrix} \dpsi \bz_0 + \dte \by_1+\dphi \bz_1 \\\\ \dx \bx_0 +\dy \by_0 \end{Bmatrix}_G
\end{equation*}
We can then determine the expression of the partial kinematic screws \(\{\cV_{1/0}^q \}\text{,}\) \(\{\cV_{2/1}^q \}\) and \(\{\cV_{2/0}^q \}\) for \(q= x,y, \psi,\theta, \phi\text{.}\) The power coefficients \(\qQ^q_{\bar{1}\to 1/0}\text{,}\) \(\qQ^q_{\bar{2}\to 2/0}\text{,}\) and \(\qQ^q_{1\leftrightarrow 2}\) are then found to be
\begin{equation*}
\qQ^q_{\bar{1}\to 1/0} =
\begin{Bmatrix}
X \bx_0 + Y \by_0 + (Z-mg)\bz_0 \\\\
M \bu
\end{Bmatrix}_I
\cdot
\frac{\partial}{\partial \dq}
\begin{Bmatrix} \dpsi \bz_0 + \dte \by_1 \\\\ \dx \bx_0 +\dy \by_0 -R \dte \bu \end{Bmatrix}_I
\end{equation*}
leading to
\begin{equation*}
\qQ^q_{\bar{1}\to 1/0}
=
\left\{
\begin{array}{ll}
X \amp , \quad q=x\\
Y \amp , \quad q=y\\
0 \amp , \quad q=\psi,\phi\\
-R(X\cos\psi+ Y\sin\psi) \amp ,\quad q=\theta
\end{array}
\right.
\end{equation*}
\begin{equation*}
\qQ^q_{\bar{2}\to 2/0} = \begin{Bmatrix}
-mg\bz_0 \\
\bze
\end{Bmatrix}_G
\cdot
\frac{\partial}{\partial \dq}
\begin{Bmatrix} \dpsi \bz_0 + \dte \by_1+\dphi \bz_1 \\\\ \dx \bx_0 +\dy \by_0 \end{Bmatrix}_G
= 0, \quad q= x,y, \psi,\theta, \phi
\end{equation*}
\begin{equation*}
\qQ^q_{1\leftrightarrow 2} =\{ \cA_{1 \to 2} \}^c \cdot \frac{\partial}{\partial \dq}
\begin{Bmatrix} \dphi \bz_1 \\\\ \bze \end{Bmatrix}_G =
\left\{
\begin{array}{l l}
0 \amp , \quad q=x,y,\psi,\theta \\
\bM_{G, 1\to 2}^c \cdot \bz_1 =0 \amp ,\quad q=\phi\\
\end{array} \right.
\end{equation*}
The next step is to find the kinetic energy of the system:
\begin{align*}
2\kin_{\Si/0} \amp = (m_1+m_2)\vel_{G/0}^2 + \bom_{1/0} \cdot \cI_{G,1}(\bom_{1/0}) +
\bom_{2/0} \cdot \cI_{G,2}(\bom_{2/0})\\
\amp = (m_1+m_2)(\dx^2 + \dy^2) + (I_1+I_2 \sin^2\te+ J_2 \cos^2\te)\dpsi^2 + (J_1+I_2) \dte^2 + J_2 \dphi^2 +
2J_2 \dphi\dpsi \cos\te
\end{align*}
We can now apply
(13.5.2) for system
\(\Sigma\) to find seven Lagrange equations:
\begin{align*}
\cL^{x}_{\Si/0}:\amp \quad m \ddx = X \amp {(3)}\\\\
\cL^{y}_{\Si/0}:\amp \quad m \ddy = Y \amp {(4)}\\\\
\cL^{\psi}_{\Si/0}:\amp \quad (I_1+I_2 \sin^2\te+ J_2 \cos^2\te)\dpsi +J_2 \dphi \cos\te = const. \amp {(5)}\\\\
\cL^{\te}_{\Si/0}:\amp \quad (J_1+I_2) \ddte - (I_2-J_2) \dpsi^2 \cos\te\sin\te
+J_2 \dphi\dpsi \sin\te = -R(X\cos\psi+ Y\sin\psi) \amp {(6)}\\
\cL^{\phi}_{\Si/0}:\amp \quad \dphi + \dpsi \cos\te = const. \amp {(7)}
\end{align*}
Equations (1-7) solve for seven unknowns \((x,y, \psi,\theta, \phi, X, Y)\text{.}\) However moment \(M\) remains unknown. To find it, it is best to use the Newton-Euler approach: it is immediately seen that the following dynamic moment equation solves for \(M\)
\begin{equation*}
\bD_{I, \Si/0} \cdot \bu = M = \bD_{I, 1/0} \cdot \bu+\bD_{I, 2/0} \cdot \bu
\end{equation*}
with
\begin{align*}
\bD_{I, 1/0} \cdot \bu \amp = \bu\cdot \left( \frac{d}{dt}\bH_{G,1/0} +\br_{IG}\times m_1 \ba_{G/0} \right)\\
\amp = \bu \cdot \frac{d}{dt}(I_1 \dpsi \bz_0 + J_1 \dte \by_1) + \bu \cdot R\bz_0 \times m_1
R(\ddte \bu+ R\dte^2 \by_1)\\
\amp = -(J_1 + m_1 R^2 ) \dte^2
\end{align*}
and
\begin{align*}
\bD_{I, 2/0} \cdot \bu \amp = \bu\cdot\left( \frac{d}{dt}\bH_{G,2/0} + \br_{IG}\times m_2 \ba_{G/0}\right) \\
\amp = \bu \cdot \frac{d}{dt}[-I_2 \dpsi \sin\te\bx_1 + I_2 \dte \by_1 +J_2 (\dphi+ \dpsi\cos\te)\bz_1]
- m_2 R^2 \dte^2 \\
\amp = -(I_2 + m_2 R^2 ) \dte^2 +\frac{d}{dt}[J_2\dphi + (J_2 -I_2) \cos\te\sin\te]
\end{align*}
This gives the expression of \(M\text{:}\)
\begin{equation*}
M= -(J_1 +I_2+ (m_1+m_2) R^2 ) \dte^2 + \frac{d}{dt}[J_2\dphi + (J_2 -I_2) \cos\te\sin\te]
\end{equation*}