Consider an equiprojective field \(P\in \cE\mapsto \buu_P\text{,}\) that, a field satisfying \(\br_{PQ} \cdot \buu_P = \br_{PQ} \cdot \buu_Q\) for any two points \(P\) and \(Q\text{.}\) Let \(O\) be a given point of \(\cE\text{.}\) Consider the linear operator \(\cL: \bX = \br_{OP} \mapsto \buu_P- \buu_O\text{.}\)
Show that \(\cL\) is skew-symmetric, that is, \(\cL (\bX)\cdot \bY =- \bX\cdot \cL (\bY)\text{.}\)
Show that \(\cL\) is necessarily linear.
Conclude that there exists a vector \(\bU\) such that
a.Let \(O\) be an arbitrary point of \(\cE\text{.}\) Define vectors \(\bxx = \br_{OP}\) and \(\byy= \br_{OQ}\) associated with points \(P\) and \(Q\text{,}\) respectively. Let us find \(\cL (\bxx)\cdot \byy\text{:}\)
This gives \(\cL (\bxx)\cdot \byy =\buu_O\cdot \br_{OP} +\buu_Q\cdot \br_{PO}\text{.}\) We compare this expression with \(\cL (\byy)\cdot \bxx\text{:}\)
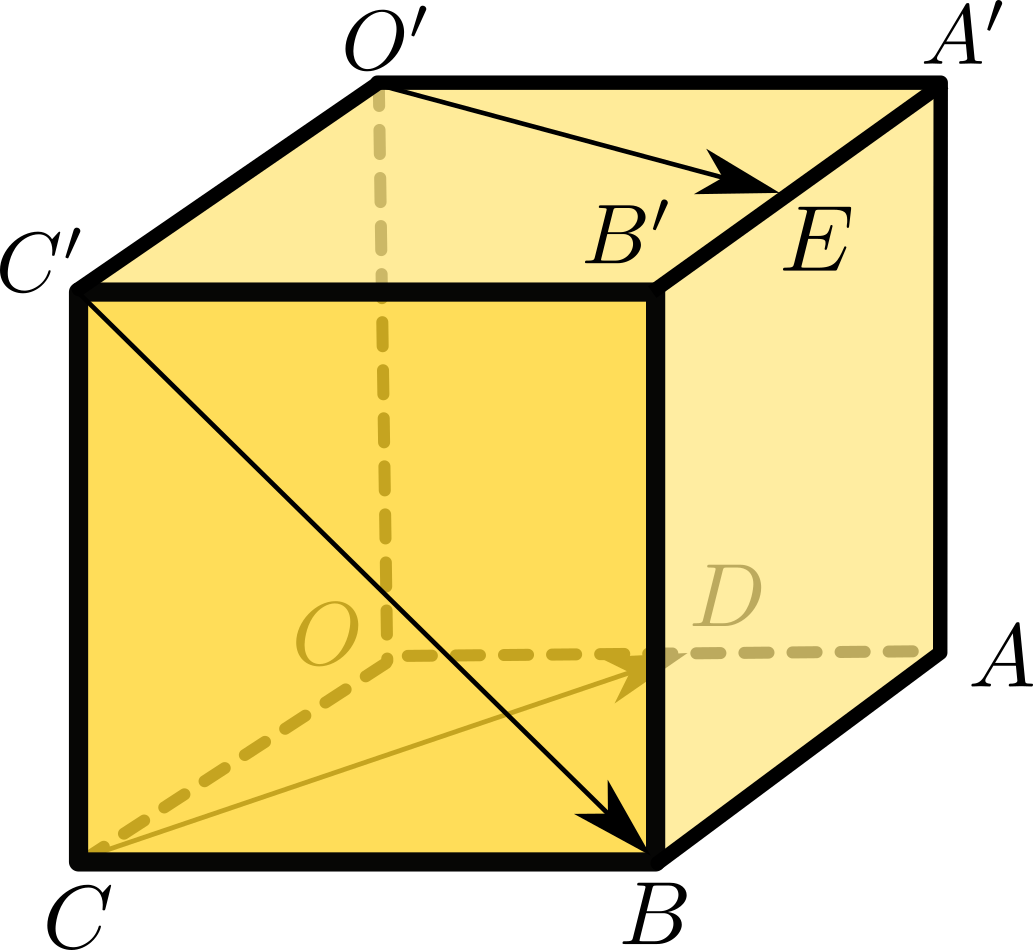
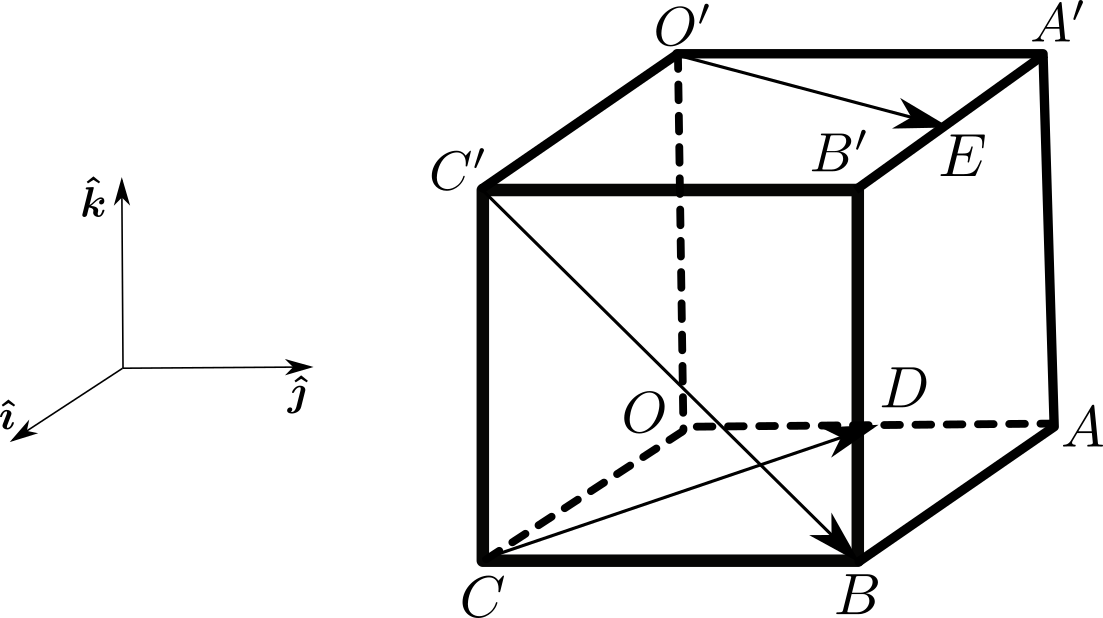
Consider the unit cube \(OABC\)\(O'A'B'C'\text{.}\) See Figure 4.10.1. Denote by \(D\) the midpoint of side \(OA\) and by \(E\) the midpoint of side \(A'B'\text{.}\) Consider the three sliders
Consider four distinct points \(A\text{,}\)\(B\text{,}\)\(C\text{,}\) and \(D\) of a Euclidean space \(\cE\text{.}\)
Show that the vector field \(P\in\cE \mapsto \bvv_P = \br_{PA} \times \br_{PB} +
\br_{PC} \times \br_{PD}\) defines a screw \(\{\cV\}\text{.}\) Find its axis.
4.
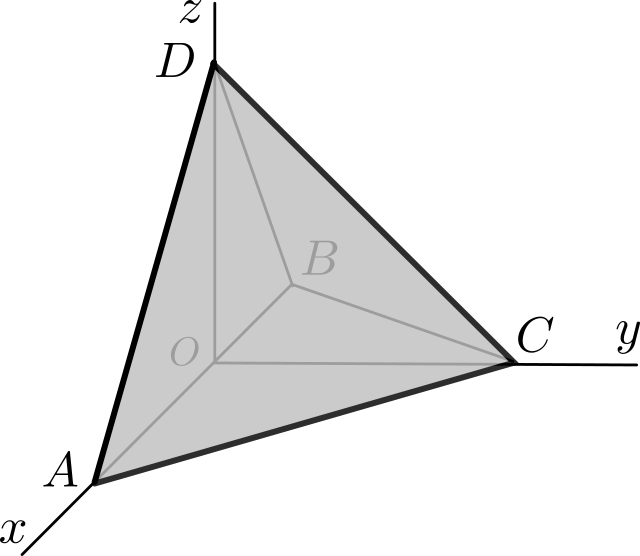
Consider four points \(A (1,0,0)\text{,}\)\(B (-1,0,0)\text{,}\)\(C (0,1,0)\text{,}\) and \(D(0,0,1)\) forming a tetrahedron in a Euclidean space \(\cE (O, \be_x, \be_y, \be_z)\text{.}\) Denote by \(\{ \cU \}\text{,}\)\(\{ \cV \}\text{,}\)\(\{\cW \}\) and \(\{ \cX \}\) the sliders corresponding to the bound vectors \((A, a\,\br_{AB})\text{,}\)\((B,b \,\br_{BC}) \text{,}\)\((C, c \,\br_{CD})\) and \((D, d \,\br_{DA})\text{,}\) respectively. The quantities \(a\text{,}\)\(b\text{,}\)\(c\) and \(d\) are non-zero scalars. Denote by \(\{\cS\} = \{ \cU \} + \{ \cV \} + \{\cW \} + \{ \cX \}\text{.}\) See Figure 4.10.3.
a. Find the condition satisfied by the scalars \((a, b, c, d)\) for screw \(\{ \cS \} \) to be a slider.
b. Find the condition satisfied by the scalars \((a, b, c, d)\) for screw \(\{ \cS \}\) to be a couple.
Figure4.10.3.
5.
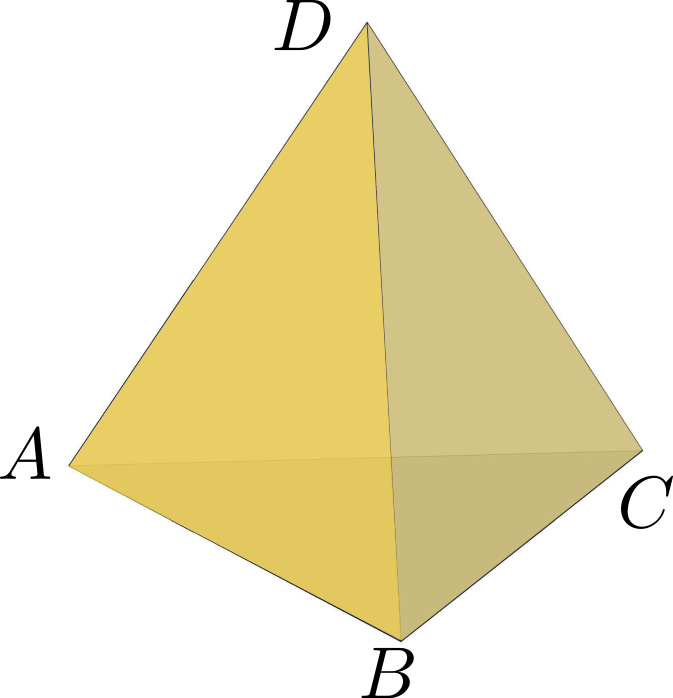
Given four points \(A\text{,}\)\(B\text{,}\)\(C\text{,}\) and \(D\) forming a regular tetrahedron, consider the sliders \(\{ \cU \}\text{,}\)\(\{ \cV \}\text{,}\) and \(\{\cW \}\) corresponding to the bound vectors \((A, \br_{AB})\text{,}\)\((B, \br_{BC})\text{,}\) and \((C,\br_{CD})\text{,}\) respectively.
Find the axis of screw \(\{\cS\} =
\{ \cU \} + \{ \cV \} + \{\cW \}\text{.}\)
Figure4.10.4.
6.
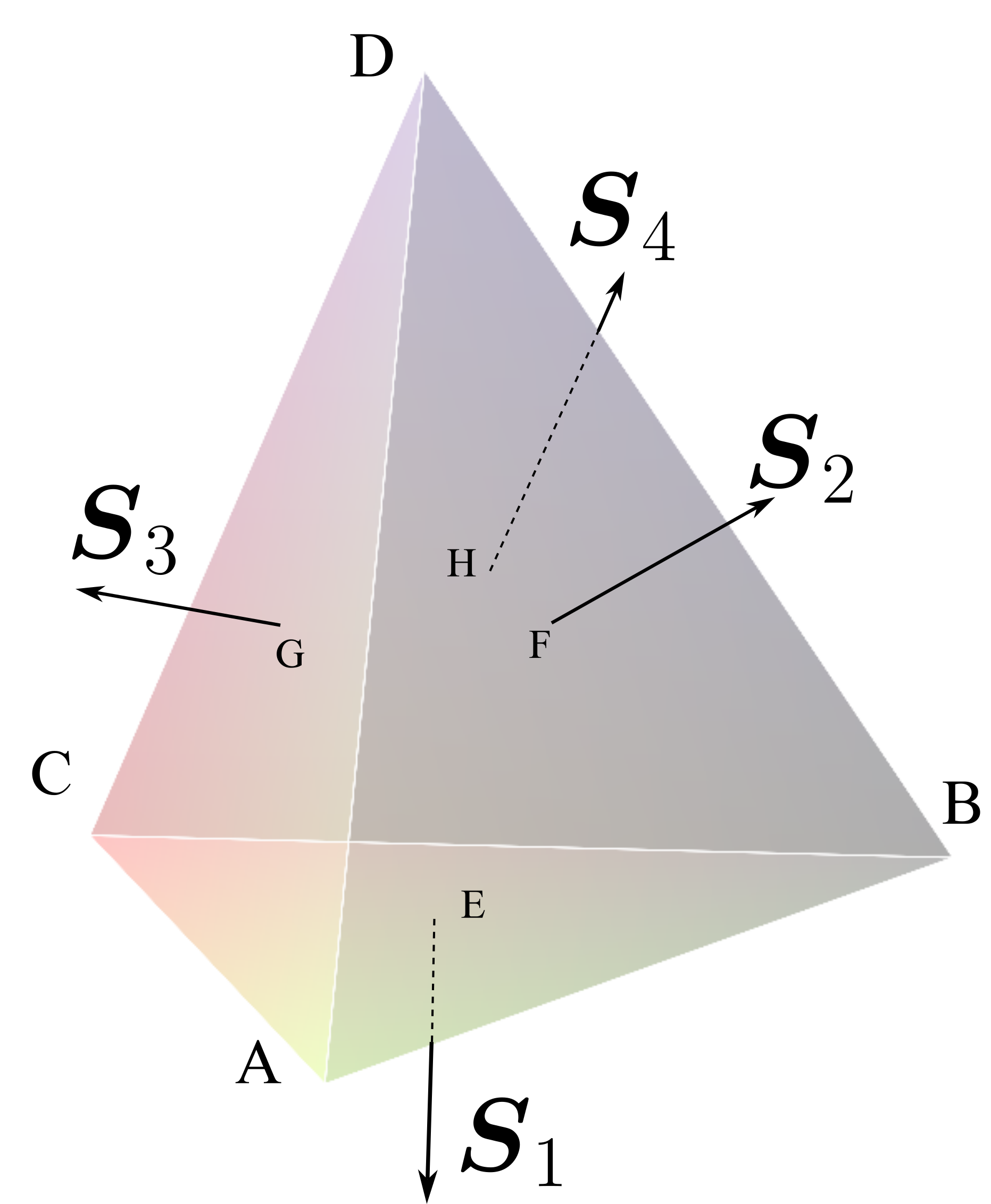
Consider the tetrahedron \(ABCD\) shown in Figure 4.10.5 and the 4 sliders
Axis \((\bS_1,E)\) is normal to the face \(ABC\) of centroid \(E\text{,}\) pointing outward. Furthermore, the magnitude of \(\bS_1\) is equal to the area of this face \(ABC\text{.}\) The remaining 3 axes \((\bS_2,F)\text{,}\)\((\bS_3,G)\text{,}\) and \((\bS_4,H)\) are defined in a similar manner (points \(F\text{,}\)\(G\text{,}\) and \(H\) are the centroids of faces \(ABD\text{,}\)\(ACD\text{,}\) and \(BCD\text{,}\) respectively). They are normal to the faces \(ABD\text{,}\)\(ACD\text{,}\) and \(BCD\text{,}\) respectively, and the magnitude of the vectors \(\bS_i\) is equal to the area of the corresponding face.
Show that \(\{\cS_1 \}+ \{\cS_2\}+ \{\cS_3\}+ \{\cS_4\} = \{0\}\text{.}\)
Show that this vector field is equiprojective, and hence defines a screw. Find the resultant of this screw. Denote this screw as \(\{\cU \} \times \{\cV \}\text{.}\)
Then show that \(\{\cU \} \times \{\cV \}= - \{\cV \} \times \{\cU \}\text{.}\) Now justify the notation \(\{\cU \} \times \{\cV \}\text{.}\)
When \(\{\cU \} \times \{\cV \}\) is not a couple, show that its axis is the common perpendicular to the axis \(\Delta_U\) of \(\{\cU\}\) and the axis \(\Delta_V\) of \(\{\cV\}\text{.}\)
defines a screw of the type \(\{\cU \} \times \{\cV \}\text{.}\) Then show that the axis of this screw, when it exists, is the common perpendicular line to lines \((A, \bA)\) and \((B, \bB)\text{.}\)