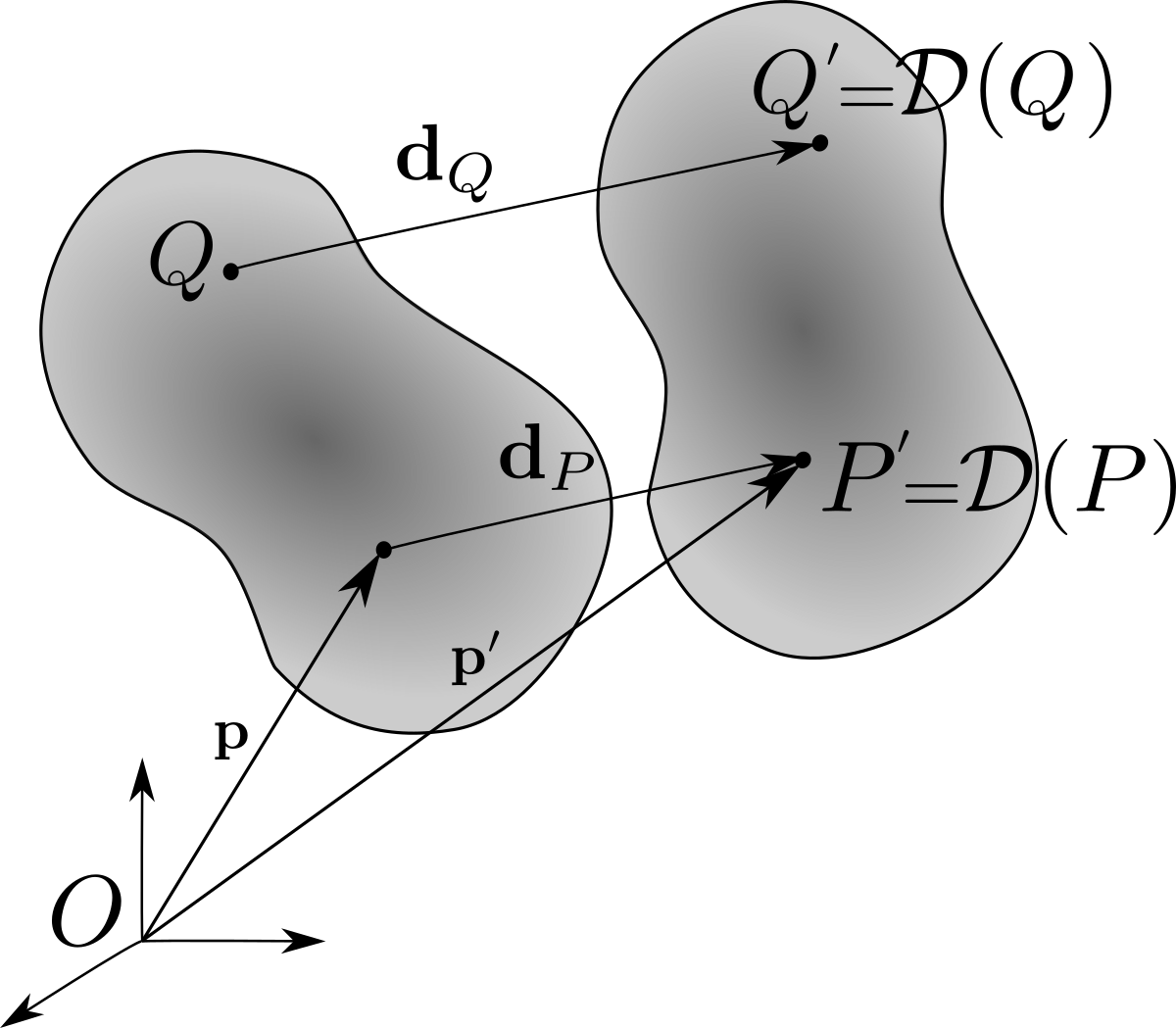
Definition 1.7.1. Displacements.
Displacements are mappings of \(\cE\) which conserve distance and orientation.
Example 1.7.16.
Solution.
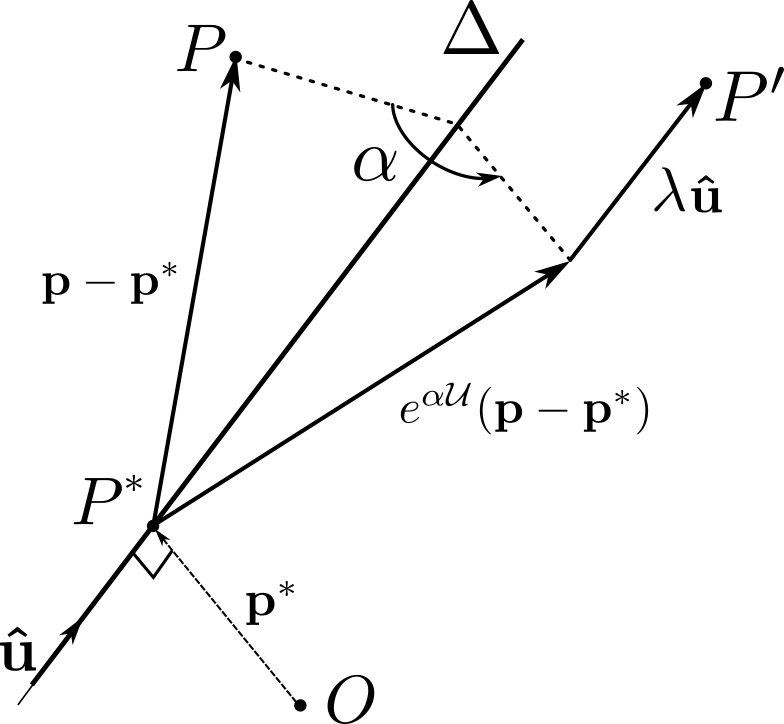
The mapping can be written in the following form:\begin{equation*} \bp'= \bl + \cR (\bp), \qquad [\bl]_E = \begin{bmatrix} 1\\ 1\\ -1\\ \end{bmatrix} \qquad [\cR]_E = \frac{1}{4} \begin{bmatrix} 1 \amp 3 \amp -\sqrt{6} \\ 3 \amp 1 \amp \sqrt{6} \\ \sqrt{6} \amp -\sqrt{6} \amp -2\\ \end{bmatrix} \end{equation*}We must check that matrix \([\cR]_E\) corresponds to a rotation: if we denote the column vectors \((\bc_1,\bc_2,\bc_3)\) we can verify that \(\bc_i \cdot \bc_j =\delta_{ij}\) and that \(\bc_3 = \bc_1 \times \bc_2\text{.}\) Since \(\bl\neq 0\text{.}\) this mapping is necessarily a displacement.We can find the direction of the corresponding screw axis by determining the set of invariant vectors by \(\cR\text{.}\) that is, satisfying \(\cR(\bV) = \bV\text{:}\)\begin{equation*} \begin{cases} \amp x_1+ 3 x_2 -\sqrt{6} x_3 =4x_1 \\ \amp 3x_1+ x_2 +\sqrt{6} x_3 =4x_2 \\ \amp \sqrt{6} x_1-\sqrt{6} x_2 -2x_3 =4x_3 \end{cases} \end{equation*}These equations are equivalent to\begin{equation*} x_1 = x_2, \qquad x_3=0 \end{equation*}We may choose \(\bu = (\be_1 + \be_2)/\sqrt{2}\) as the direction of the screw axis. The corresponding angle \(\al\) is found by finding \(\cos\al\) and \(\sin\al\text{:}\)\begin{equation*} 2\cos\al +1 = \text{tr}(\cR) = 0, \qquad \sin\al = (\bv, \cR(\bv), \bu) =- \frac{\sqrt{3}}{2} \end{equation*}by choosing \(\bv = \be_3\) (normal to \(\bu\text{.}\) This gives \(\al = 4\pi/3\text{.}\) Finally, we find \(\cR = \cR_{4\pi/3,\bu}\text{.}\)The screw displacement is given by \(\la = \bl \cdot \bu = \sqrt{2}\text{.}\) since \(\la\neq 0\text{.}\) the displacement is a screw displacement. To find the screw axis, we can find point \(P^*\) by applying formula (1.7.7), or we can find the set of points \(P\) whose displacement is \(\sqrt{2} \bu\text{,}\) that is, such that \(\bp'-\bp = \sqrt{2}\bu\text{.}\)\begin{equation*} \begin{cases} \amp -3 x_1+ 3 x_2 -\sqrt{6} x_3 =0 \\ \amp 3x_1-3 x_2 +\sqrt{6} x_3 = 0 \\ \amp \sqrt{6} x_1-\sqrt{6} x_2 -6x_3 =-1 \end{cases} \end{equation*}This gives the axis \(\Delta (A, \bu)\) with \(A(1/\sqrt{6},0,-1/2)\text{.}\) It is easy to verify that the point \(P^*\) given by\begin{equation*} \br_{OP^*}= \frac{1}{2} \cot\frac{\al}{2} \, \bu\times\bl - \frac{1}{2}\bu\times(\bu\times\bl) = \frac{\be_1}{2\sqrt{6}} - \frac{\be_2}{2\sqrt{6}} - \frac{\be_3}{2} \end{equation*}lies on axis \(\Delta\text{.}\)
