We first seek to define the position of origin \(B\) of \(\cB\) relative to referential \(\cE\text{.}\) This is done by defining a coordinate system, that is, a mapping \(P\in \cE \mapsto (q_1, q_2, q_3) \in \mathbb{R}^3\text{.}\)
Definition1.2.1.Coordinate System.
The position of a point \(P\) in a referential \(\cE\) is defined by a coordinate system, that is, a set a three scalar parameters \((q_1, q_2, q_3)\text{,}\) called coordinates of \(P\text{.}\) Given an origin \(O\) of \(\cE\text{,}\) the position vector\(\br_{OP}\) is a vector function of \((q_1, q_2, q_3)\text{:}\)
There are several practical ways to parametrize the position of a point relative to a given referential. We describe below the Cartesian, cylindrical and spherical coordinate systems. Other ways can be devised by mixing various coordinates taken from these three systems.
Subsection1.2.1Cartesian Coordinate System
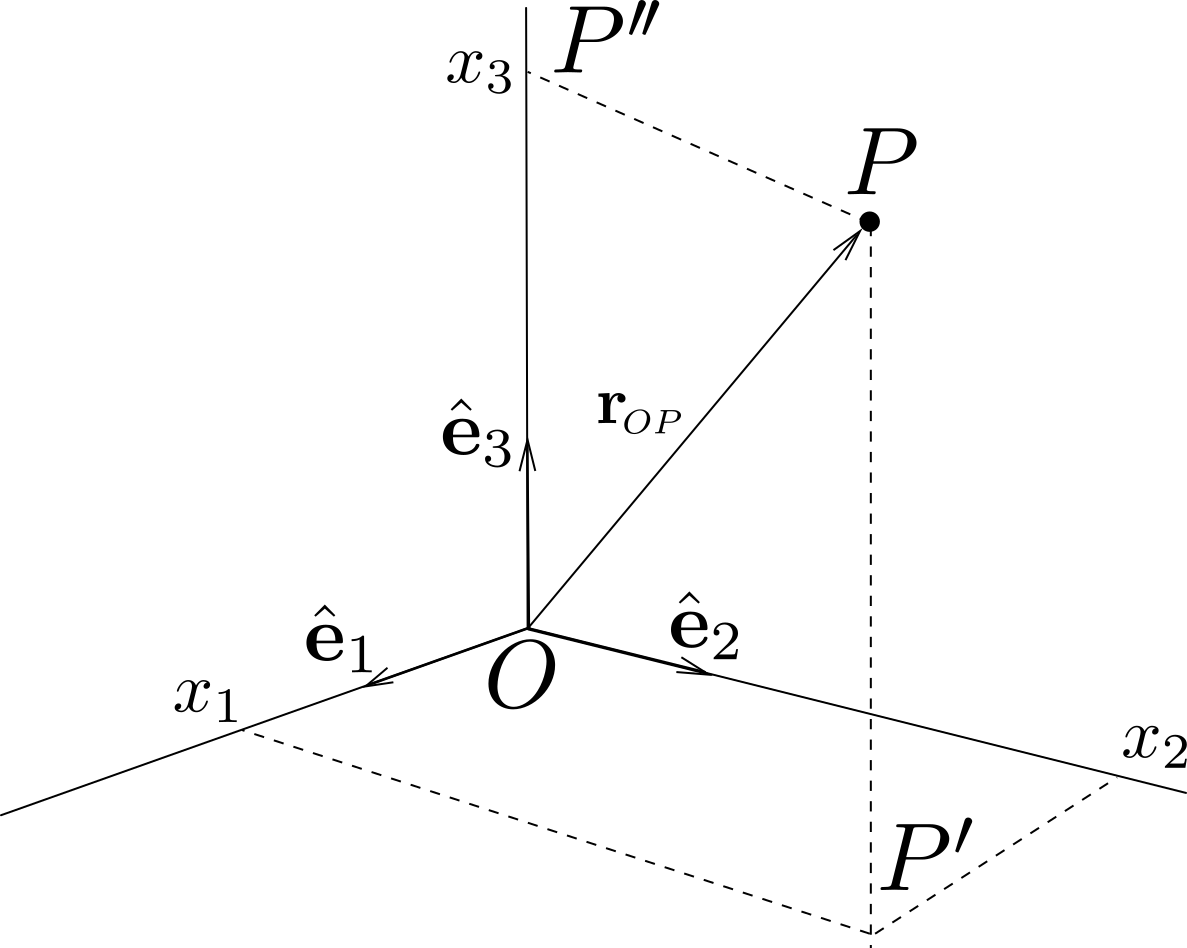
Consider three axes fixed in referential \(\cE\text{,}\) intersecting at origin \(O\text{,}\) and mutually perpendicular. We orient these axes by the unit vectors \(\be_1\text{,}\)\(\be_2\) and \(\be_3\text{,}\) such that the triplet \((\be_1 ,\be_2 ,\be_3 )\) defines a right-handed orthonormal basis. See Figure 1.2.2.
Figure1.2.2.Cartesian coordinates of point \(P\text{.}\)
Definition1.2.3.Cartesian coordinates.
The Cartesian coordinates \((x_1, x_2, x_3)\) of point \(P\) are the components of position vector \(\br_{OP}\) on basis \((\be_1 ,\be_2 ,\be_3)\text{:}\)
where point \(P'\) and \(P''\) are the projections of \(P\) onto plane \((O, \be_1,\be_2)\) and line \((O,\be_3)\text{,}\) respectively.
We often identify a referential \(\cE\) with a set \((O,\be_1,\be_2,\be_3)\) chosen fixed in \(\cE\text{.}\) However one should not confuse the notion of referential with that of coordinate system. In particular, more than one Cartesian coordinate system can be defined within a given referential.
Subsection1.2.2Cylindrical Coordinate System
Let \((O, \be_1, \be_2,\be_3)\) define three Cartesian axes \((O, \be_1)\text{,}\)\((O,\be_2)\) and \((O,\be_3)\) attached to referential \(\cE\text{.}\)
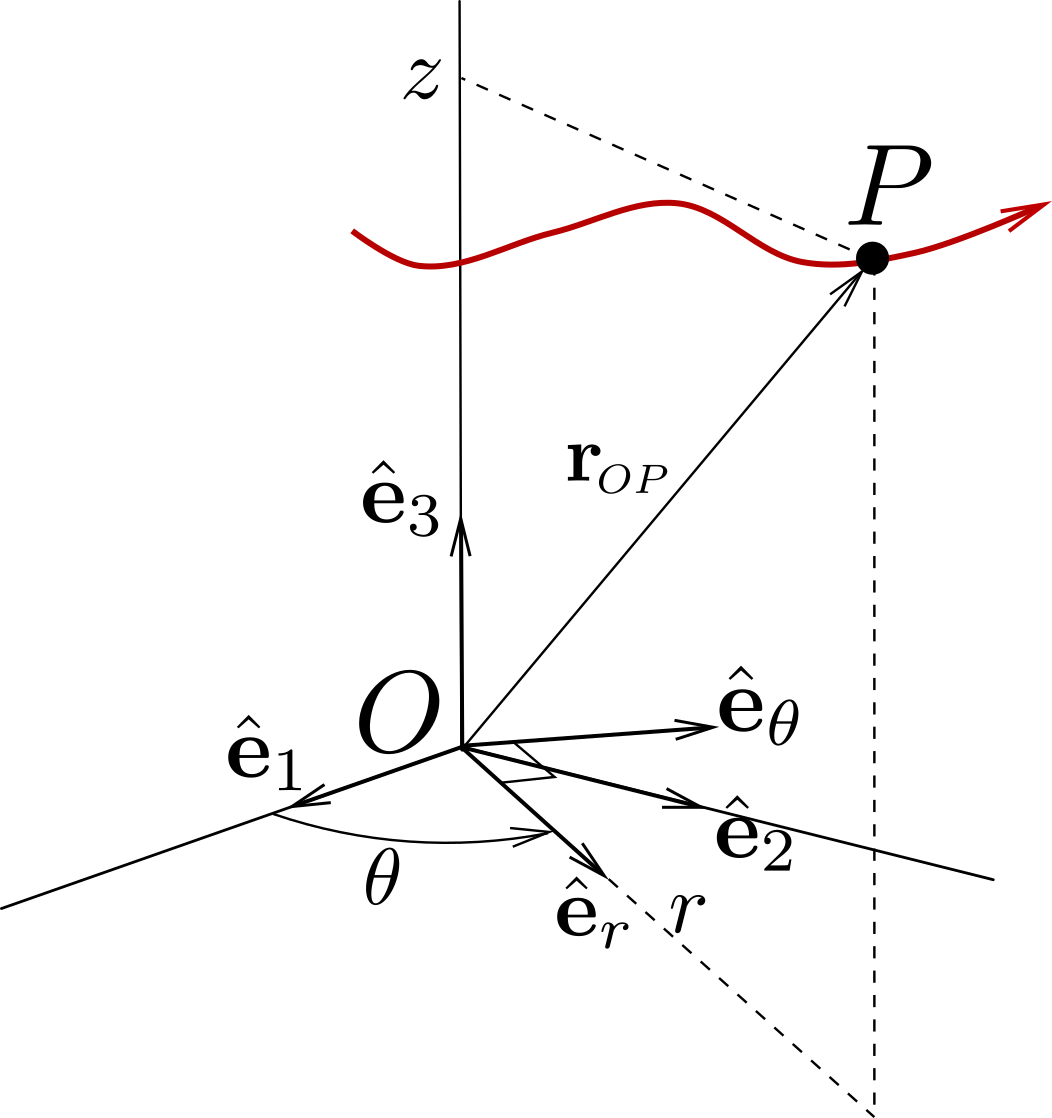
Figure1.2.4.Cylindrical coordinates of point \(P\text{.}\)
Definition1.2.5.Cylindrical coordinates.
The cylindrical coordinates of point \(P\) are defined as the triplet \((r, \te, z= x_3)\) in the following way (see Figure 1.2.4):
(i) radial coordinate \(r\) is the magnitude of position vector \(\br_{OP'}\text{,}\)\(P'\) projection of \(P\) onto plane \((O,\be_1,\be_2)\text{.}\)
(ii) \(\theta\) is the oriented angle between axis \((O,\be_1)\) and line \(OP'\text{.}\)
(iii) \(z= x_3\) is the component of position vector \(\br_{OP}\) on unit vector \(\be_z = \be_3\text{.}\)
The position vector of \(P\) can then be written as
\begin{equation*}
\label{pos-cyl}
\br_{OP} = r \be_r + z \be_z
\end{equation*}
where \(\be_r\) is the radial unit vector, pointing from \(O\) to \(P'\text{.}\)
Note that \(\be_r\) is a function of angle \(\theta\text{.}\) A third unit vector \(\be_\te\) can be defined such that the triplet \((\be_r , \be_\te , \be_z)\) forms a right-handed basis.
Subsection1.2.3Spherical Coordinate System
Let \((O, \be_1, \be_2,\be_3)\) define three Cartesian axes \((O, \be_1)\text{,}\)\((O,\be_2)\) and \((O,\be_3)\) attached to referential \(\cE\text{.}\)
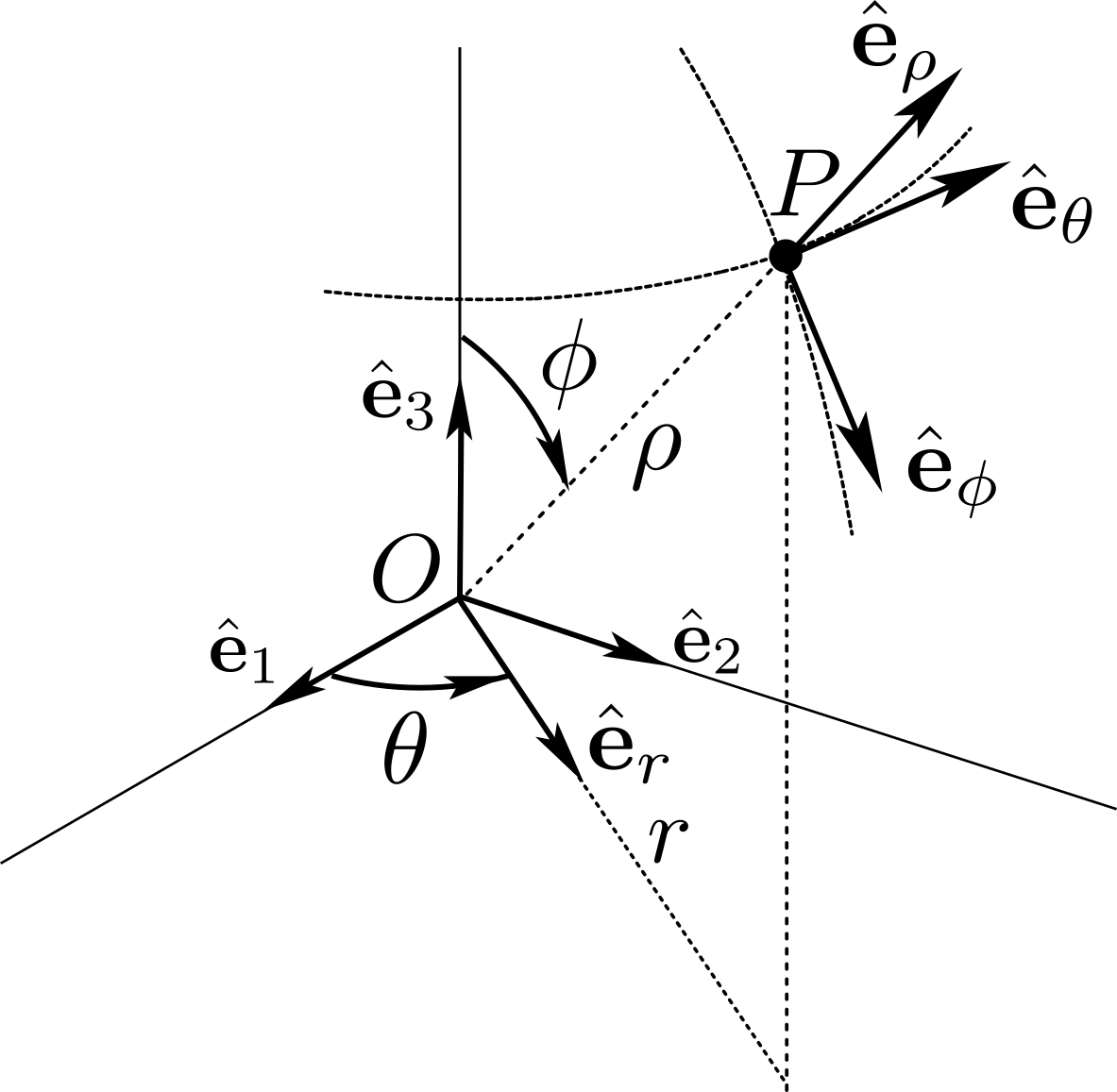
Figure1.2.6.Spherical coordinates of point \(P\text{.}\)
Definition1.2.7.Spherical coordinates.
The spherical coordinates \((\rho , \phi, \te)\) of point \(P\) are defined in the following way (see Figure 1.2.6):
(i) define coordinate \(\rho\) as the distance from point \(O\) to point \(P\text{.}\)
(ii) project \(P\) onto plane \((O,\be_1,\be_2)\) to obtain point \(P'\) and define the azimuthal (or longitude) angle \(\te\) as the angle measured between axis \((O,\be_1)\) and line \(OP'\text{.}\)
(iii) define colatitude angle \(\phi\) as the angle measured from axis \((O,\be_3)\) and line \(OP\text{.}\)
where \(\be_\ro\) is the unit vector pointing from \(O\) to \(P\text{.}\)
Note that unit vector \(\be_\ro\) is a function of both angles \(\phi\) and \(\te\text{.}\) Two additional units vectors can be defined from the spherical coordinates of \(P\text{:}\)
unit vector \(\be_\phi\) tangential to the line of constant \(\te\) at \(P\) in the direction of increasing \(\phi\text{,}\)
unit vector \(\be_\te\) tangential to the line of constant \(\phi\) at \(P\) in the direction of increasing \(\te\text{.}\)