Skip to main content Contents Index Prev Up Next \(\newcommand{\val}{Val\text{00E9}ry}
\newcommand{\N}{\mathbb N} \newcommand{\Z}{\mathbb Z} \newcommand{\Q}{\mathbb Q} \newcommand{\R}{\mathbb R}
\newcommand{\cA}{{\mathcal{A}}}
\newcommand{\cB}{{\mathcal{B}}}
\newcommand{\cC}{{\mathcal{C}}}
\newcommand{\cD}{{\mathcal{D}}}
\newcommand{\cE}{{\mathcal{E}}}
\newcommand{\cF}{{\mathcal{F}}}
\newcommand{\cG}{{\mathcal{G}}}
\newcommand{\cH}{{\mathcal{H}}}
\newcommand{\cI}{{\mathcal{I}}}
\newcommand{\cJ}{{\mathcal{J}}}
\newcommand{\cL}{{\mathcal{L}}}
\newcommand{\cM}{{\mathcal{M}}}
\newcommand{\Pow}{{\mathbb{P}}}
\newcommand{\cP}{{\mathcal{P}}}
\newcommand{\cR}{{\mathcal{R}}}
\newcommand{\cS}{{\mathcal{S}}}
\newcommand{\cT}{{\mathcal{T}}}
\newcommand{\cU}{{\mathcal{U}}}
\newcommand{\cV}{{\mathcal{V}}}
\newcommand{\cW}{{\mathcal{W}}}
\newcommand{\cX}{{\mathcal{X}}}
\newcommand{\bze}{{\bf 0}}
\newcommand{\bA}{{\bf A}}
\newcommand{\ba}{{\bf a}}
\newcommand{\bha}{{\bf \hat{a}}}
\newcommand{\bB}{{\bf B}}
\newcommand{\bob}{{\bf b}}
\newcommand{\bhb}{{\bf \hat{b}}}
\newcommand{\bC}{{\bf C}}
\newcommand{\bc}{{\bf c}}
\newcommand{\bhc}{{\bf \hat{c}}}
\newcommand{\bD}{{\bf D}}
\newcommand{\bod}{{\bf d}}
\newcommand{\be}{{\bf \hat{e}}}
\newcommand{\bef}{{\bf \hat{f}}}
\newcommand{\bof}{{\bf f}}
\newcommand{\force}{{\bf f}}
\newcommand{\bF}{{\bf F}}
\newcommand{\tbF}{\tilde{\bf F}}
\newcommand{\bG}{{\bf G}}
\newcommand{\bog}{{\bf g}}
\newcommand{\bg}{{\bf g}}
\newcommand{\bH}{{\bf H}}
\newcommand{\bh}{{\bf h}}
\newcommand{\bI}{{\bf I}}
\newcommand{\bi}{{\boldsymbol{\hat{\imath}}}}
\newcommand{\bj}{{\boldsymbol{\hat{\jmath}}}}
\newcommand{\bk}{{\bf \hat{k}}}
\newcommand{\bK}{{\bf \hat{K}}}
\newcommand{\bL}{{\bf L}}
\newcommand{\bl}{\mathbfit{l}}
\newcommand{\bM}{{\bf M}}
\newcommand{\bn}{{\bf \hat{n}}}
\newcommand{\bq}{{\bf q}}
\newcommand{\conjQ}{\overline{Q}}
\newcommand{\conjP}{\bar{P}}
\newcommand{\bp}{{\bf p}}
\newcommand{\br}{{\bf r}}
\newcommand{\bs}{{\bf s}}
\newcommand{\bS}{{\bf S}}
\newcommand{\bR}{{\bf R}}
\newcommand{\bT}{{\bf T}}
\newcommand{\bt}{{\bf \hat{t}}}
\newcommand{\bu}{{\bf \hat{u}}}
\newcommand{\buu}{{\bf {u}}}
\newcommand{\bU}{{\bf U}}
\newcommand{\vel}{{\bf v}}
\newcommand{\bV}{{\bf V}}
\newcommand{\bv}{{\bf \hat{v}}}
\newcommand{\bvv}{{\bf {v}}}
\newcommand{\vv}{{\bf v}^*}
\newcommand{\bww}{{\bf {w}}}
\newcommand{\pvel}{{\bf w}}
\newcommand{\bW}{{\bf W}}
\newcommand{\bw}{{\bf \hat{w}}}
\newcommand{\bx}{{\bf \hat{x}}}
\newcommand{\bxx}{{\bf x}}
\newcommand{\bX}{{\bf X}}
\newcommand{\bY}{{\bf Y}}
\newcommand{\by}{{\bf \hat{y}}}
\newcommand{\byy}{{\bf y}}
\newcommand{\bz}{{\bf \hat{z}}}
\newcommand{\bom}{\boldsymbol{\omega}}
\newcommand{\bde}{\mathbf{\delta}}
\newcommand{\bOm}{\boldsymbol{\Omega}}
\newcommand{\bal}{\boldsymbol{\alpha}}
\newcommand{\bomFE}{{\boldsymbol{\omega}}_{\cF/\cE}}
\newcommand{\bomBA}{{\boldsymbol{\omega}}_{\cB/\cA}}
\newcommand{\bGa}{\boldsymbol{\Gamma}}
\newcommand{\btau}{\hat{\boldsymbol{\tau}}}
\newcommand{\rot}{\boldsymbol{\tau}}
\newcommand{\grad}{\boldsymbol{\nabla}}
\newcommand{\iner}{{\cal I}_B}
\newcommand{\inerG}{{\cal I}_G}
\newcommand{\Earth}{\text{Earth}}
\newcommand{\Arrow}{\mbox {$\longrightarrow$}}
\newcommand{\half}{\frac{1}{2}}
\newcommand{\al}{\alpha}
\newcommand{\ep}{\epsilon}
\newcommand{\ga}{\gamma}
\newcommand{\te}{\theta}
\newcommand{\la}{\lambda}
\newcommand{\om}{\omega}
\newcommand{\Om}{\Omega}
\newcommand{\ro}{\rho}
\newcommand{\Si}{\Sigma}
\newcommand{\pSi}{{\partial \Sigma}}
\newcommand{\bSi}{{\bar{\Sigma}}}
\newcommand{\si}{\sigma}
\newcommand{\dl}{\dot{l}}
\newcommand{\ddl}{\ddot{l}}
\newcommand{\dep}{\dot{\ep}}
\newcommand{\ddep}{\ddot{\ep}}
\newcommand{\ddbe}{\ddot{\beta}}
\newcommand{\dbe}{\dot{\beta}}
\newcommand{\dal}{\dot{\alpha}}
\newcommand{\ddal}{\ddot{\alpha}}
\newcommand{\ddga}{\ddot{\gamma}}
\newcommand{\dphi}{\dot{\phi}}
\newcommand{\ddphi}{\ddot{\phi}}
\newcommand{\dpsi}{\dot{\psi}}
\newcommand{\ddpsi}{\ddot{\psi}}
\newcommand{\dte}{\dot{\te}}
\newcommand{\ddte}{\ddot{\te}}
\newcommand{\dom}{\dot{\om}}
\newcommand{\dx}{\dot{x}}
\newcommand{\ddx}{\ddot{x}}
\newcommand{\dX}{\dot{X}}
\newcommand{\ddX}{\ddot{X}}
\newcommand{\dy}{\dot{y}}
\newcommand{\ddy}{\ddot{y}}
\newcommand{\dY}{\dot{Y}}
\newcommand{\ddY}{\ddot{Y}}
\newcommand{\dz}{\dot{z}}
\newcommand{\dZ}{\dot{Z}}
\newcommand{\ddz}{\ddot{z}}
\newcommand{\ddZ}{\ddot{Z}}
\newcommand{\Dp}{\dot{p}}
\newcommand{\ddr}{\ddot{r}}
\newcommand{\dr}{\dot{r}}
\newcommand{\dq}{\dot{q}}
\newcommand{\dQ}{\dot{Q}}
\newcommand{\tq}{\tilde{q}}
\newcommand{\ddq}{\ddot{q}}
\newcommand{\dbq}{\dot{{\bf q}}}
\newcommand{\ddbq}{\ddot{{\bf q}}}
\newcommand{\dds}{\ddot{s}}
\newcommand{\ds}{\dot{s}}
\newcommand{\dro}{\dot{\ro}}
\newcommand{\ddro}{\ddot{\ro}}
\newcommand{\dv}{\dot{v}}
\newcommand{\du}{\dot{u}}
\newcommand{\bSi}{\overline{\Sigma}}
\newcommand{\coB}{\overline{{\cal B}}}
\newcommand{\kin}{\mathbb{K}}
\newcommand{\qQ}{{\mathbb{Q}}}
\newcommand{\pot}{{\mathbb{U}}}
\newcommand{\hal}{{\mathbb{H}}}
\newcommand{\lag}{{\mathbb{L}}}
\newcommand{\gib}{{\mathbb{S}}}
\newcommand{\energ}{{\mathbb{E}}}
\newcommand{\danger}{\text{⚠}}
\newcommand{\ddanger}{\text{⚠}}
\newcommand{\lt}{<}
\newcommand{\gt}{>}
\newcommand{\amp}{&}
\definecolor{fillinmathshade}{gray}{0.9}
\newcommand{\fillinmath}[1]{\mathchoice{\colorbox{fillinmathshade}{$\displaystyle \phantom{\,#1\,}$}}{\colorbox{fillinmathshade}{$\textstyle \phantom{\,#1\,}$}}{\colorbox{fillinmathshade}{$\scriptstyle \phantom{\,#1\,}$}}{\colorbox{fillinmathshade}{$\scriptscriptstyle\phantom{\,#1\,}$}}}
\)
Chapter 10 Mechanical Actions
In this chapter, we seek to model the mechanical actions exerted on a material system
\(\Sigma\text{.}\) We define a
mechanical action as any cause capable of either maintaining a material system in equilibrium, or of modifying its motion or shape. On the simplest level, recall that the action of a force
\(\bF_A\) exerted on a system
\(\Sigma\) is properly defined by indicating both the value of vector
\(\bF_A\) and its line of action (or simply a point on this line of action): hence this mechanical action is defined by the bound vector
\((A, \bF_A)\) or in the language of screws by the
slider denoted as
\begin{equation*}
\left\{ \begin{array}{c} \bF_A \\ \bze
\end{array} \right\}_A
\end{equation*}
Screws are useful tools to account for the sum of discrete forces, or for the sum of forces distributed over
\(\Sigma\) (or over a subset of
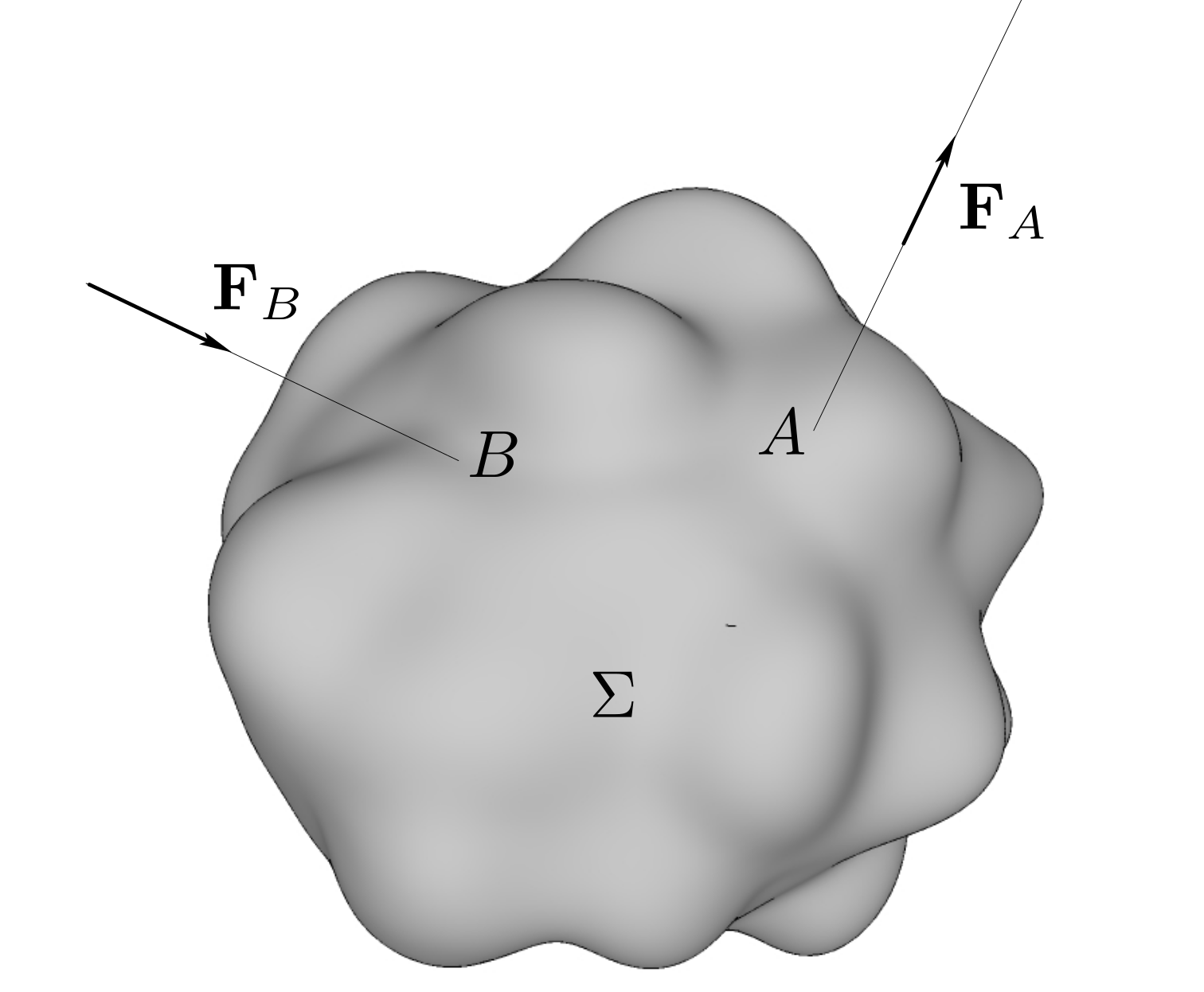
\(\Si\) ). For instance, the action of force
\(\bF_A\) acting through point
\(A\) and force
\(\bF_B\) acting through point
\(B\) results in the screw (see
Figure 10.0.1 )
\begin{equation*}
\left\{ \begin{array}{c} \bF_A \\ \bze
\end{array} \right\}_A
+
\left\{ \begin{array}{c} \bF_B \\ \bze
\end{array} \right\}_B =
\left\{ \begin{array}{c} \bF_A + \bF_B \\ \bF_A \times\br_{AQ}
+\bF_B \times\br_{BQ}
\end{array} \right\}_Q
\end{equation*}
More generally, in the case of distributed forces, we consider two types of interactions between material systems
\(\Sigma_1\) and
\(\Sigma_2\text{:}\) action at-a-distance (such as gravitational actions) exerted at every point within the volume of each systems, and contact actions exerted on all or part of their boundary. From a
local description of elementary forces modeled as bound vectors (or sliders) acting on infinitesimal elements of volume or surface of
\(\Sigma_2\text{,}\) we obtain a
global description of the action of
\(\Sigma_1\) on
\(\Sigma_2\) in term of a screw called
action screw , and denoted as
\(\{ \cA_{\Sigma_1 \to \Sigma_2} \}\text{.}\) The global effect of all mechanical actions exerted on a material system will be defined in terms of the
total external action screw .
Figure 10.0.1.