Consider a rigid body \(\cB\) whose position relative to a Newtonian referential \(\cE\) is defined by \((n+1)\) independent variables \((q_1, q_2, \ldots q_n, t)\text{.}\) Assume that the variables \((q_1, \ldots q_n,\dq_1, \ldots, \dq_n, t)\) are independent. Use the field \(P\in \cB \mapsto \vel^*_P = \frac{\partial \br_{OP}}{\partial t}\) as the virtual velocity field in the Principle of Virtual Power to show the following equation
where \(\kin^{(k)}\) is the kinetic energy of \(\cB\) of order \(k\)\((\kin = \kin^{(0)}+\kin^{(1)}+\kin^{(2)})\text{.}\) Generalize this equation for a system of \(p\) rigid bodies.
2.
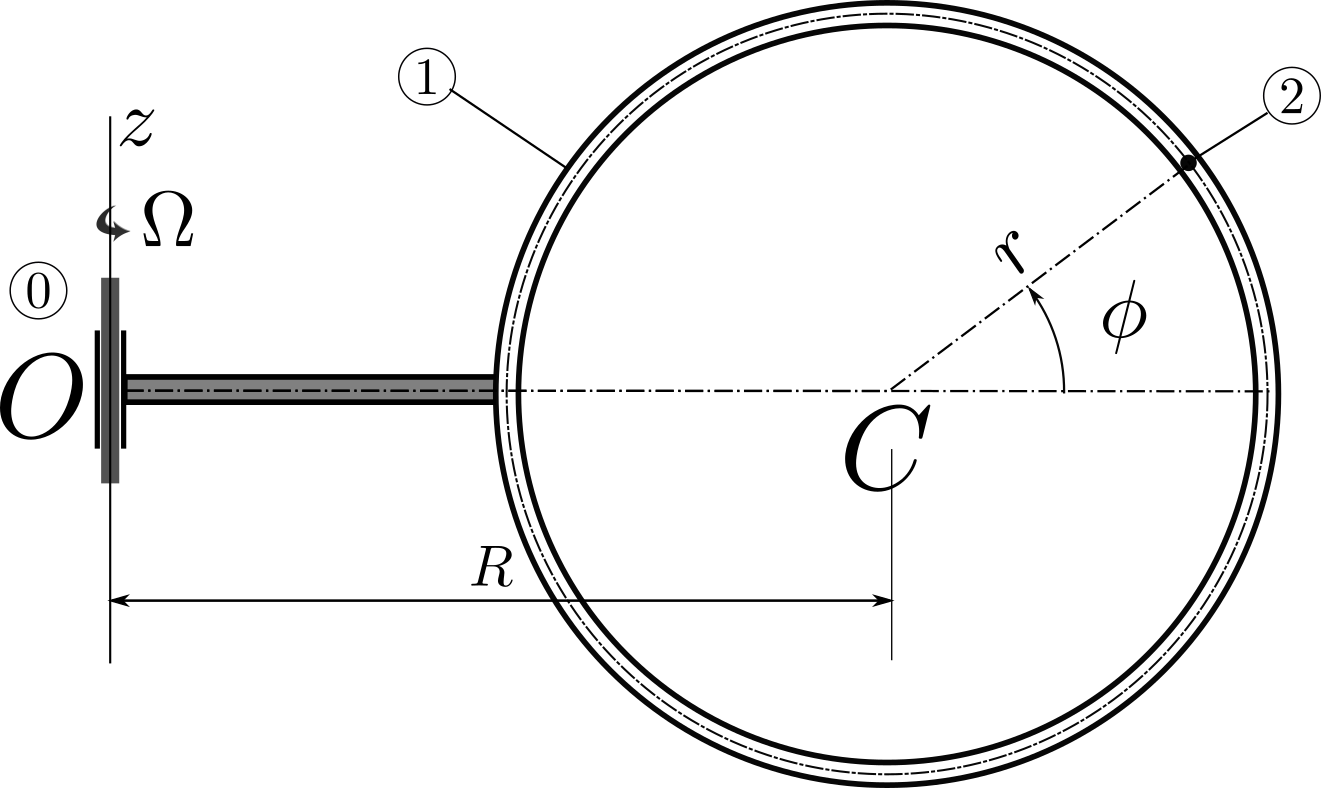
A small spherical ball 2 of mass \(m\) fits loosely in the interior of a vertical hoop 1 of center \(C\) and radius \(r\) which is driven in rotation about a vertical axis \(Oz\) at constant angular velocity \(\Om\text{.}\) The position of ball 2 relative to the hoop is defined by angle \(\phi\text{.}\) The contact is assumed frictionless. Denote by \(R =|OC|\) and by \(I_1\) the moment of inertia of body 1 about axis \(Oz\text{.}\) The pivot connection is assumed ideal.
Figure13.9.1.
Find Painlevé equation applied to system \(\Si =\{1,2\}\text{.}\) Deduce that ball 2 moves in a one-dimensional effective potential \(\pot_{eff} (\phi)\) given by
\begin{equation*}
\pot_{eff} (\phi) = -\half m R \Omega^2 (R+r \cos\phi)^2+ mg r \sin\phi
\end{equation*}
Find the equilibrium positions and discuss their stability. Then discuss the nature of the non-equilibrium solutions.
Find the couple \(\cC\) needed to set the system in rotation about axis \(Oz\text{.}\)
3.
Figure 13.9.2} shows a schematic of an open-flow, sea-bed mounted device \(\Si\) used to harvest marine current power. The system is observed in a Newtonian referential 0\((O,\bx_0,\by_0,\bz_0)\) with unit vector \(\bz_0\) directed upward. It is comprised of the following bodies:
the arm 1\((O,\bx_0,\by_1,\bz_1)\) is modeled as a uniform slender rod of length \(2l_1\) and mass \(m_1\text{:}\) its orientation is defined by angle \(\te_1 = (\by_0, \by_1)\text{.}\)
the wing 2\((O,\bx_0, \by_2, \bz_2)\) is modeled a uniform plate of dimensions \(2b\) (along \(\bx_0\)) and \(2c\) (along \(\by_2\)), of mass \(m_2\text{,}\) mass center \(G_2\) (\(\br_{DG_2} = c \by_2\)). It is in rotation about axis \((D,\bx_0)\) relative to arm 1: its orientation relative to arm 1 is defined by angle \(\te_2 = (\by_1, \by_2)\text{.}\)
the two hydraulic cylinders 3 and \four mounted between the fixed referential (at pivots \(A\) and \(B\)) and the arm 1 at pivot \(C\) (\(|OA|=|OB|= H\) and \(|OC|= L\)). Their mass is assumed negligible.
Figure13.9.2.
The action of the surrounding water current on each element \(dl\) at point \(P\) of rod 1 is defined by a resistive viscous force \(d\bof = - k \vel_P dl\text{.}\) The action of the surrounding water current on wing 2 is defined by the action screw
with \(\bu_3 = \frac{\br_{AC}}{|AC|}\) and \(\bu_4 = \frac{\br_{BC}}{|BC|}\text{.}\)
Find the kinetic energy \(\kin_{\Si/0}\) of system \(\Si\text{.}\)
Find the virtual power due the action of water current on bodies 1 and 2 corresponding to virtual speeds \((\te_1^*,\te_2^*)\) compatible with the geometric constraints of the system.
Find the virtual power due the action of the hydraulic cylinders on body 1 corresponding to virtual speeds \((\dte_1^*,\dte_2^*)\) compatible with the geometric constraints of the system.
Derive Lagrange equations \(\cL_{\Si/0}^q\) for the coordinates \(q= \te_1, \te_2\text{.}\)