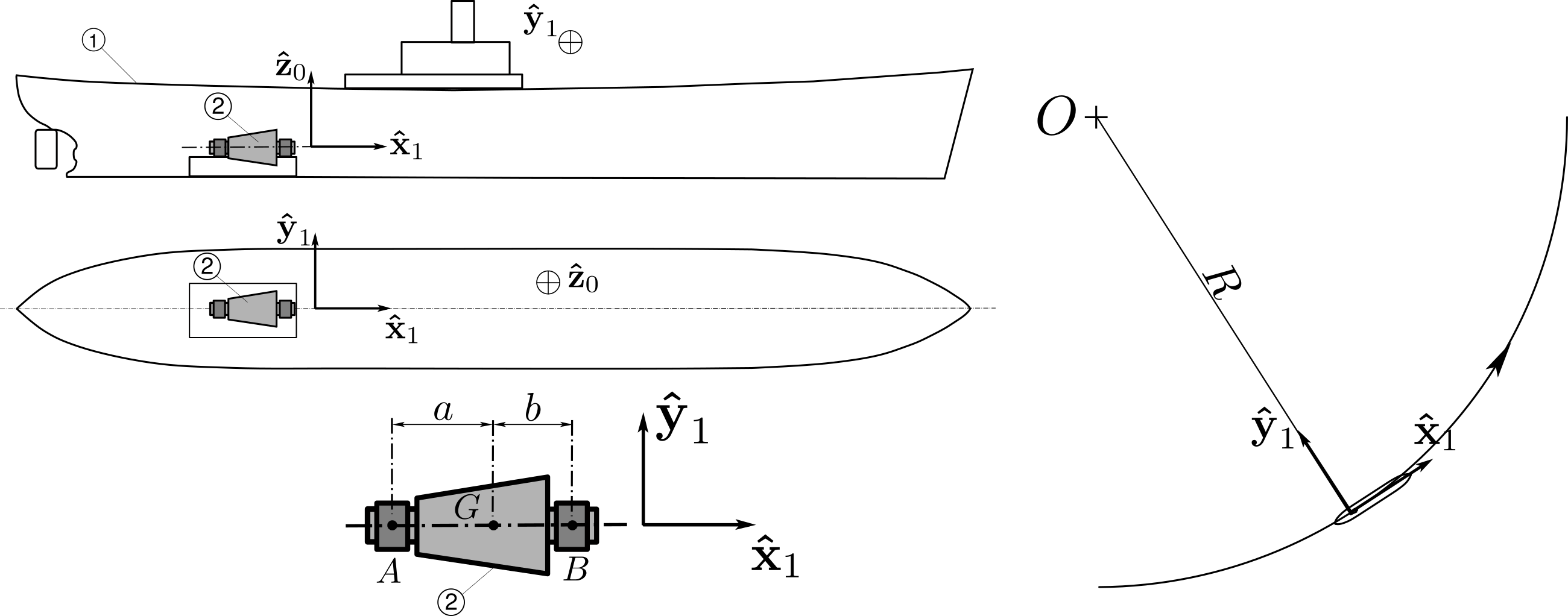
Figure 15.7.1 shows a cargo ship 1\((G, \bx_1, \by_1, \bz_0)\) moving at constant speed \(v_G\) relative to a referential 0. It is equipped with a turbine 2 of axis \((G, \bx_1)\text{,}\) of mass center \(G\text{,}\) mass \(m\text{,}\) and of axial moment of inertia \(C\text{.}\) This axisymmetric body rotates at constant angular speed \(\bom_{2/1} = \Om \bx_1\text{.}\) The body’s shaft is supported by two bearings at \(A\) and \(B\text{.}\)
The ship is undergoing a circular trajectory of radius \(R\) so that its angular velocity is given by \(\bom_{1/0} = (v_G /R) \bz_0\text{.}\)
Figure15.7.1.
Assume that the actions at bearings \(A\) and \(B\) on body 2 can be modelled as the sum of the action screws
The axial component of angular momentum \(\bH_G\) is much larger than its transverse component, so that \(\bH_G \approx C \Omega \bx_1\text{.}\)
In the absence of a driving or frictional torque, find the reaction forces \(\bR_A\) and \(\bR_B\) at the bearings \(A\) and \(B\) in terms of \(\Om\text{,}\)\(v_G\) and the parameters \(a,b, R, C\text{.}\) Comment on the results obtained.
2.
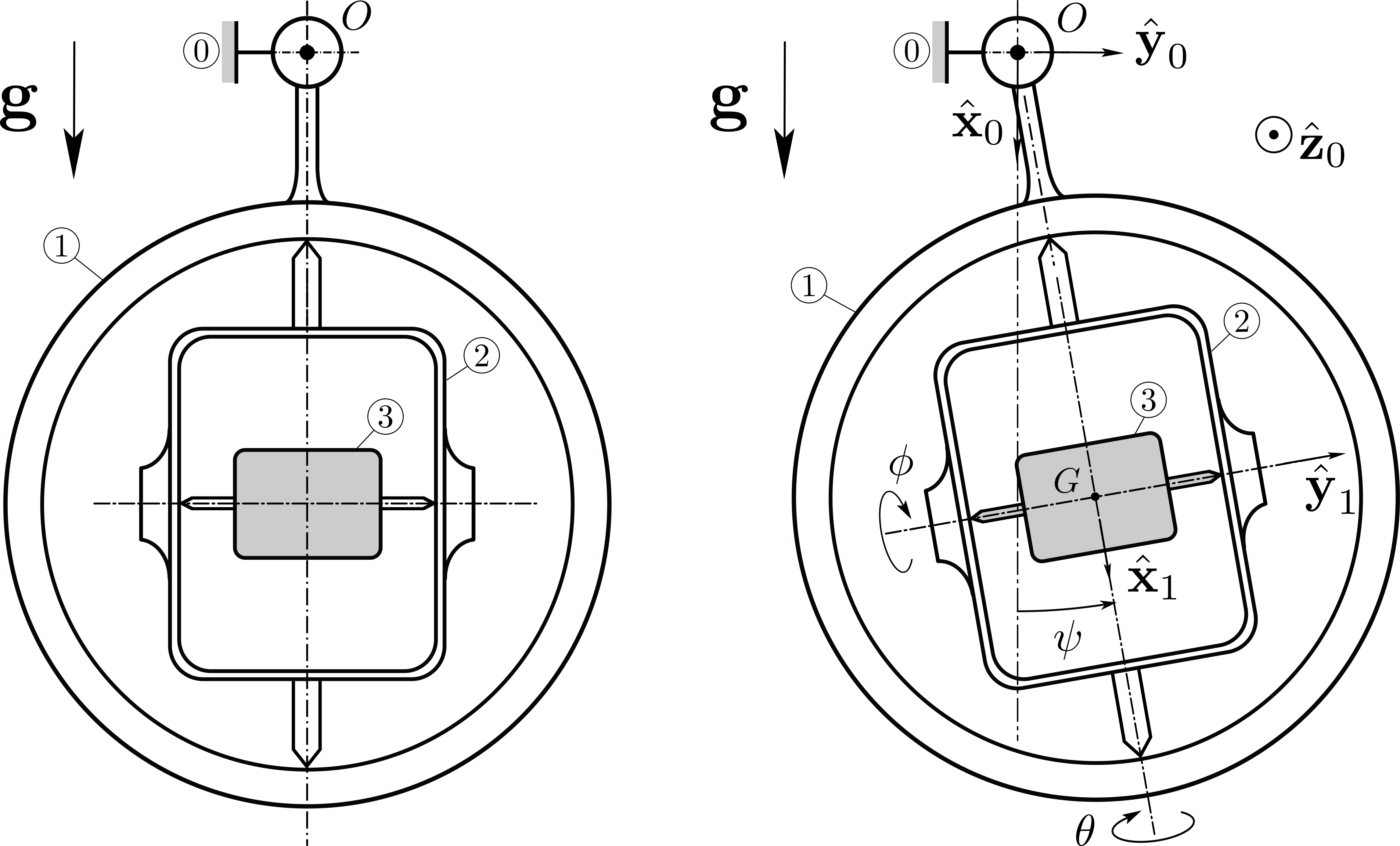
A gyroscopic pendulum is a device whose function is to remain vertical, despite the accelerations of its support. It is modeled as a system \(\Sigma\) which consists of three bodies in motion relative to a referential 0\((O,\bx_0,\by_0,\bz_0)\) assumed Newtonian. Axis \((O,\bx_0)\) is vertical and directed downward \((\bog = g \bx_0)\text{.}\) It is comprised of three bodies:
Body 1\((O,\bx_1, \by_1, \bz_1=\bz_0)\) is free to rotate about horizontal axis \((O,\bz_0)\text{.}\) Its orientation is defined by angle \(\Psi\text{.}\) Its mass is neglected. The pivot connection is assumed ideal.
Body 2\((O,\bx_2=\bx_1,\by_2,\bz_2)\) represents the housing of the gyrostat. Its mass is neglected. It is elastically connected to body 1 by an ideal pivot of axis \((O, \bx_1)\text{.}\) Its orientation relative to body 1 is defined by angle \(\theta\text{.}\) The linear rotational spring mounted between the two bodies can be modeled by the elastic couple
Finally, body 2\((G,\bx_3,\by_3=\by_2,\bz_3)\) is axisymmetric, of axis \((G,\by_2)\text{,}\) of mass \(m\text{,}\) mass center \(G\) (with \(\br_{OG}= L \bx_1\text{,}\)\(L\) a positive constant), and axial moment of inertia \(J\text{.}\) The pivot connection of axis \((G, \by_2)\) between 2 and 3 is assumed ideal. Given a large initial spin \(\dphi_0\) about axis \((G, \by_2)\text{,}\) it behaves like a gyroscope.
Figure15.7.2.
The figure displayed above shows the system at equilibrium (on the left) when the axes \((O,\bx_0)\) and \((O,\bx_1)\) coincide, and \(\by_0= \by_1 = \by_2\text{,}\) so that \(\psi=\te= 0\text{.}\) At equilibrium, the action of the spring vanishes. On the right of the sketch, the system is shown in a perturbed configuration (with \(\by_2=\by_1\) to simplify the sketch). We are interested in the study of the system away from its equilibrium (\(\psi\neq 0\) and \(\te\neq 0\) at \(t=0\)) and released from rest (\(\dpsi= \dte =0\) at \(t=0\)). To simplify the analysis, the gyroscopic approximation is used, that is, the angular momentum of body 3 about \(G\) is approximated as \(\bH_G = J \dphi\,\by_2\text{.}\) We are only interested in the small oscillations of the system (\(\psi \ll 1\) and \(\te \ll 1\)).
Sketch the rotation diagrams which map basis \((\bx_0,\by_0,\bz_0)\) to basis \((\bx_3,\by_3=\by_2, \bz_3)\text{.}\) Then show a sketch of the system showing the interconnections/interactions. Give the expression of kinematic screw \(\{ \cV_{3/0} \}\text{.}\)
Justify that \(\dphi\) must remain constant during the motion.
In this question, we want to predict the evolution of small angles \(\psi\) and \(\te\text{.}\)
Apply the FTD to (massless) body 1.
Apply the FTD to (massless) body 2.
Apply the FTD to body 3.
Conclude by finding the two (linearized) equations governing angles \(\psi\) and \(\te\text{.}\) Describe the motion of the system. In particular, show that the system exhibits very slow oscillations. Find the period of these oscillations.
In reality, the pivot connecting 2 and 3 is not ideal: a component \(\bM_{G, 2\to 3}^c \cdot\by_2 = - \mu \dphi\) (\(\mu\) is a positive constant, and \(\dphi\) is no longer constant) must be taken into account due to friction. A motor \(\cM_{23}\) of couple \(\cC \by_2\) mounted between 2 and 3 is used to maintain the motion of the gyroscope. Find the kinetic energy of body 3 (neglect the effect of its transverse moment of inertia). Then apply the TKE to the system to find the necessary value of couple \(\cC\text{.}\)