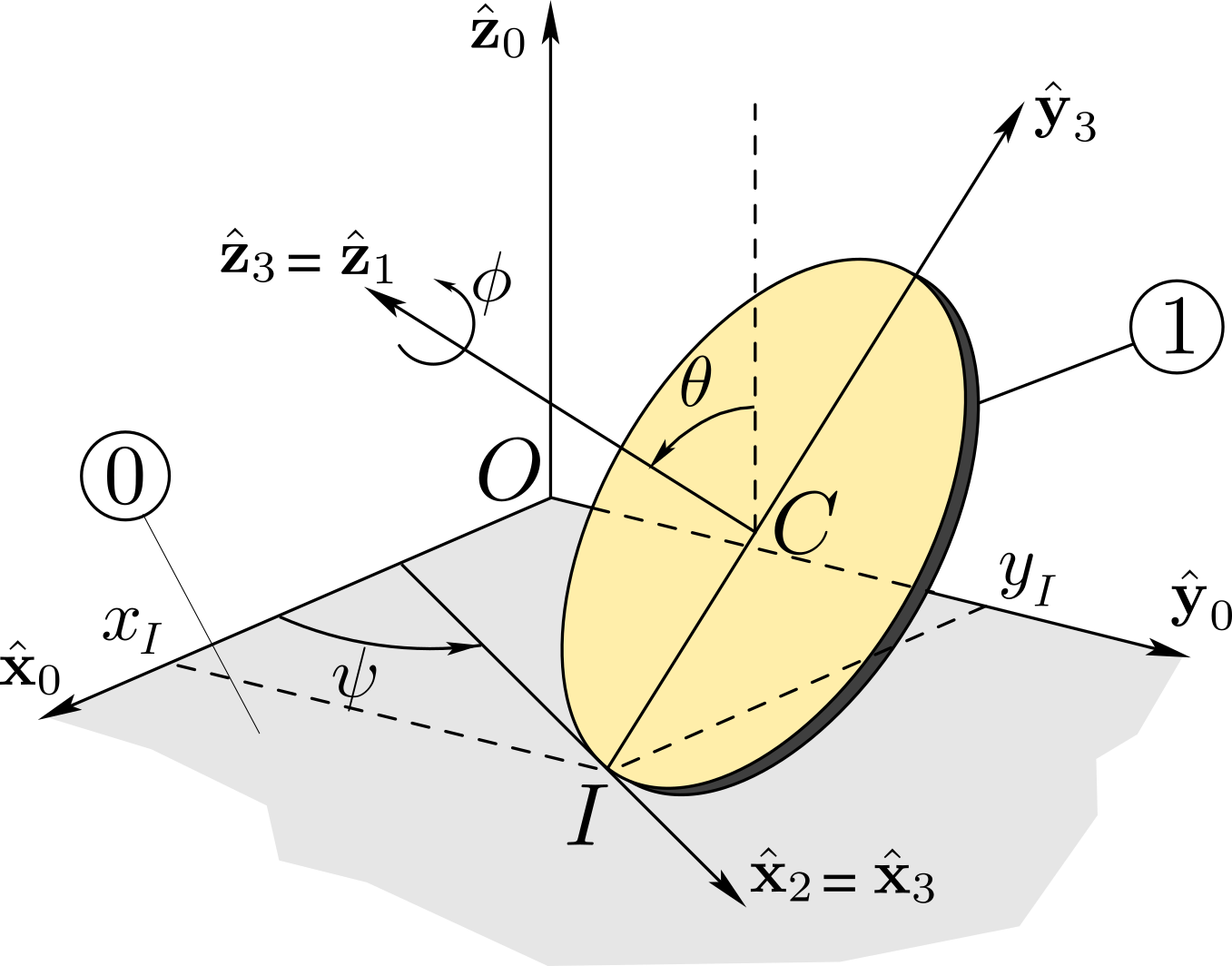
With this parametrization, we find the angular velocity of the disk
\begin{equation*}
\bom_{1/0} = \bom_{1/3} +\bom_{3/2}+ \bom_{2/0}=\dphi \bz_3+\dte \bx_2+ \dpsi \bz_0\text{.}
\end{equation*}
To find the pivoting component of \(\bom_{1/0}\text{,}\) we project \(\bom_{1/0}\) on the unit normal \(\bz_0\text{:}\)
\begin{equation*}
\bom^{n}_{1/0} =
( \bom_{1/0} \cdot \bz_0 ) \bz_0
= [(\dpsi \bz_0 + \dte \bx_2+ \dphi \bz_3) \cdot \bz_0 ] \bz_0
\end{equation*}
or
\begin{equation*}
\bom^{n}_{1/0} = (\dpsi + \dphi\cos\te ) \bz_0
\end{equation*}
The rolling component is then given by \(\bom_{1/0}^{t} = \bom_{1/0} - \bom_{1/0}^{n}\)
\begin{equation*}
\bom^{t}_{1/0} = \dte \bx_2 - \dphi \sin\te \by_2
\end{equation*}
The angular acceleration of \(\cB_1\) relative to \(\cB_0\) can be found as:
\begin{equation*}
\bal_{1/0} = \ddphi \bz_3 + \ddte \bx_2 + \ddpsi \bz_0 + \dphi (\dte\bx_2+\dpsi\bz_0)\times \bz_3
+ \dte \dpsi \by_2
\end{equation*}
leading to, on basis \((\bx_3, \by_3, \bz_3)\)
\begin{align*}
\bal_{1/0} = (\ddte +\dpsi\dphi\sin\te)\bx_3 \amp + (\ddpsi \sin\te -\dte\dphi +\dpsi\dte \cos\te)\by_3\\
\amp \quad + (\ddphi + \ddpsi \cos\te - \dpsi\dte \sin\te)\bz_3
\end{align*}
To write the kinematic screw \(\{ {\cal V} _{1/0 } \}\) of \(\cB_1\text{,}\) we need to find the velocity of center \(C\) by differentiating the position vector \(\br_{OC} = x_I \bx_0 + y_I \by_0 + R \by_3\text{:}\)
\begin{align*}
\vel_{C / 0} \amp = \dx_I \bx_0 + \dy_I \by_0
+ R (\dte\bx_2+\dpsi\bz_0)\times \by_3\\
\amp = \dx_I \bx_0 + \dy_I \by_0 +R (\dte \bz_3 -\dpsi\cos\te\bx_3)
\end{align*}
This leads to the expression
\begin{equation*}
\{ {\cal V} _{1/0 } \} =
\begin{Bmatrix}
\dphi \bz_3+\dte \bx_2+ \dpsi \bz_0 \\
\\
\dx_I \bx_0 + \dy_I \by_0
+ R (\dte \bz_3 -\dpsi\cos\te\bx_3)
\end{Bmatrix}_C
\end{equation*}