Skip to main content Contents Index Prev Up Next \(\newcommand{\val}{Val\text{00E9}ry}
\newcommand{\N}{\mathbb N} \newcommand{\Z}{\mathbb Z} \newcommand{\Q}{\mathbb Q} \newcommand{\R}{\mathbb R}
\newcommand{\cA}{{\mathcal{A}}}
\newcommand{\cB}{{\mathcal{B}}}
\newcommand{\cC}{{\mathcal{C}}}
\newcommand{\cD}{{\mathcal{D}}}
\newcommand{\cE}{{\mathcal{E}}}
\newcommand{\cF}{{\mathcal{F}}}
\newcommand{\cG}{{\mathcal{G}}}
\newcommand{\cH}{{\mathcal{H}}}
\newcommand{\cI}{{\mathcal{I}}}
\newcommand{\cJ}{{\mathcal{J}}}
\newcommand{\cL}{{\mathcal{L}}}
\newcommand{\cM}{{\mathcal{M}}}
\newcommand{\Pow}{{\mathbb{P}}}
\newcommand{\cP}{{\mathcal{P}}}
\newcommand{\cR}{{\mathcal{R}}}
\newcommand{\cS}{{\mathcal{S}}}
\newcommand{\cT}{{\mathcal{T}}}
\newcommand{\cU}{{\mathcal{U}}}
\newcommand{\cV}{{\mathcal{V}}}
\newcommand{\cW}{{\mathcal{W}}}
\newcommand{\cX}{{\mathcal{X}}}
\newcommand{\bze}{{\bf 0}}
\newcommand{\bA}{{\bf A}}
\newcommand{\ba}{{\bf a}}
\newcommand{\bha}{{\bf \hat{a}}}
\newcommand{\bB}{{\bf B}}
\newcommand{\bob}{{\bf b}}
\newcommand{\bhb}{{\bf \hat{b}}}
\newcommand{\bC}{{\bf C}}
\newcommand{\bc}{{\bf c}}
\newcommand{\bhc}{{\bf \hat{c}}}
\newcommand{\bD}{{\bf D}}
\newcommand{\bod}{{\bf d}}
\newcommand{\be}{{\bf \hat{e}}}
\newcommand{\bef}{{\bf \hat{f}}}
\newcommand{\bof}{{\bf f}}
\newcommand{\force}{{\bf f}}
\newcommand{\bF}{{\bf F}}
\newcommand{\tbF}{\tilde{\bf F}}
\newcommand{\bG}{{\bf G}}
\newcommand{\bog}{{\bf g}}
\newcommand{\bg}{{\bf g}}
\newcommand{\bH}{{\bf H}}
\newcommand{\bh}{{\bf h}}
\newcommand{\bI}{{\bf I}}
\newcommand{\bi}{{\boldsymbol{\hat{\imath}}}}
\newcommand{\bj}{{\boldsymbol{\hat{\jmath}}}}
\newcommand{\bk}{{\bf \hat{k}}}
\newcommand{\bK}{{\bf \hat{K}}}
\newcommand{\bL}{{\bf L}}
\newcommand{\bl}{\mathbfit{l}}
\newcommand{\bM}{{\bf M}}
\newcommand{\bn}{{\bf \hat{n}}}
\newcommand{\bq}{{\bf q}}
\newcommand{\conjQ}{\overline{Q}}
\newcommand{\conjP}{\bar{P}}
\newcommand{\bp}{{\bf p}}
\newcommand{\br}{{\bf r}}
\newcommand{\bs}{{\bf s}}
\newcommand{\bS}{{\bf S}}
\newcommand{\bR}{{\bf R}}
\newcommand{\bT}{{\bf T}}
\newcommand{\bt}{{\bf \hat{t}}}
\newcommand{\bu}{{\bf \hat{u}}}
\newcommand{\buu}{{\bf {u}}}
\newcommand{\bU}{{\bf U}}
\newcommand{\vel}{{\bf v}}
\newcommand{\bV}{{\bf V}}
\newcommand{\bv}{{\bf \hat{v}}}
\newcommand{\bvv}{{\bf {v}}}
\newcommand{\vv}{{\bf v}^*}
\newcommand{\bww}{{\bf {w}}}
\newcommand{\pvel}{{\bf w}}
\newcommand{\bW}{{\bf W}}
\newcommand{\bw}{{\bf \hat{w}}}
\newcommand{\bx}{{\bf \hat{x}}}
\newcommand{\bxx}{{\bf x}}
\newcommand{\bX}{{\bf X}}
\newcommand{\bY}{{\bf Y}}
\newcommand{\by}{{\bf \hat{y}}}
\newcommand{\byy}{{\bf y}}
\newcommand{\bz}{{\bf \hat{z}}}
\newcommand{\bom}{\boldsymbol{\omega}}
\newcommand{\bde}{\mathbf{\delta}}
\newcommand{\bOm}{\boldsymbol{\Omega}}
\newcommand{\bal}{\boldsymbol{\alpha}}
\newcommand{\bomFE}{{\boldsymbol{\omega}}_{\cF/\cE}}
\newcommand{\bomBA}{{\boldsymbol{\omega}}_{\cB/\cA}}
\newcommand{\bGa}{\boldsymbol{\Gamma}}
\newcommand{\btau}{\hat{\boldsymbol{\tau}}}
\newcommand{\rot}{\boldsymbol{\tau}}
\newcommand{\grad}{\boldsymbol{\nabla}}
\newcommand{\iner}{{\cal I}_B}
\newcommand{\inerG}{{\cal I}_G}
\newcommand{\Earth}{\text{Earth}}
\newcommand{\Arrow}{\mbox {$\longrightarrow$}}
\newcommand{\half}{\frac{1}{2}}
\newcommand{\al}{\alpha}
\newcommand{\ep}{\epsilon}
\newcommand{\ga}{\gamma}
\newcommand{\te}{\theta}
\newcommand{\la}{\lambda}
\newcommand{\om}{\omega}
\newcommand{\Om}{\Omega}
\newcommand{\ro}{\rho}
\newcommand{\Si}{\Sigma}
\newcommand{\pSi}{{\partial \Sigma}}
\newcommand{\bSi}{{\bar{\Sigma}}}
\newcommand{\si}{\sigma}
\newcommand{\dl}{\dot{l}}
\newcommand{\ddl}{\ddot{l}}
\newcommand{\dep}{\dot{\ep}}
\newcommand{\ddep}{\ddot{\ep}}
\newcommand{\ddbe}{\ddot{\beta}}
\newcommand{\dbe}{\dot{\beta}}
\newcommand{\dal}{\dot{\alpha}}
\newcommand{\ddal}{\ddot{\alpha}}
\newcommand{\ddga}{\ddot{\gamma}}
\newcommand{\dphi}{\dot{\phi}}
\newcommand{\ddphi}{\ddot{\phi}}
\newcommand{\dpsi}{\dot{\psi}}
\newcommand{\ddpsi}{\ddot{\psi}}
\newcommand{\dte}{\dot{\te}}
\newcommand{\ddte}{\ddot{\te}}
\newcommand{\dom}{\dot{\om}}
\newcommand{\dx}{\dot{x}}
\newcommand{\ddx}{\ddot{x}}
\newcommand{\dX}{\dot{X}}
\newcommand{\ddX}{\ddot{X}}
\newcommand{\dy}{\dot{y}}
\newcommand{\ddy}{\ddot{y}}
\newcommand{\dY}{\dot{Y}}
\newcommand{\ddY}{\ddot{Y}}
\newcommand{\dz}{\dot{z}}
\newcommand{\dZ}{\dot{Z}}
\newcommand{\ddz}{\ddot{z}}
\newcommand{\ddZ}{\ddot{Z}}
\newcommand{\Dp}{\dot{p}}
\newcommand{\ddr}{\ddot{r}}
\newcommand{\dr}{\dot{r}}
\newcommand{\dq}{\dot{q}}
\newcommand{\dQ}{\dot{Q}}
\newcommand{\tq}{\tilde{q}}
\newcommand{\ddq}{\ddot{q}}
\newcommand{\dbq}{\dot{{\bf q}}}
\newcommand{\ddbq}{\ddot{{\bf q}}}
\newcommand{\dds}{\ddot{s}}
\newcommand{\ds}{\dot{s}}
\newcommand{\dro}{\dot{\ro}}
\newcommand{\ddro}{\ddot{\ro}}
\newcommand{\dv}{\dot{v}}
\newcommand{\du}{\dot{u}}
\newcommand{\bSi}{\overline{\Sigma}}
\newcommand{\coB}{\overline{{\cal B}}}
\newcommand{\kin}{\mathbb{K}}
\newcommand{\qQ}{{\mathbb{Q}}}
\newcommand{\pot}{{\mathbb{U}}}
\newcommand{\hal}{{\mathbb{H}}}
\newcommand{\lag}{{\mathbb{L}}}
\newcommand{\gib}{{\mathbb{S}}}
\newcommand{\energ}{{\mathbb{E}}}
\newcommand{\danger}{\text{⚠}}
\newcommand{\ddanger}{\text{⚠}}
\newcommand{\lt}{<}
\newcommand{\gt}{>}
\newcommand{\amp}{&}
\definecolor{fillinmathshade}{gray}{0.9}
\newcommand{\fillinmath}[1]{\mathchoice{\colorbox{fillinmathshade}{$\displaystyle \phantom{\,#1\,}$}}{\colorbox{fillinmathshade}{$\textstyle \phantom{\,#1\,}$}}{\colorbox{fillinmathshade}{$\scriptstyle \phantom{\,#1\,}$}}{\colorbox{fillinmathshade}{$\scriptscriptstyle\phantom{\,#1\,}$}}}
\)
Chapter 15 Gyroscopic Phenomena
The gyroscopic effect is the tendency of an axisymmetric rigid body undergoing a rapid rotation about its axis to oppose all mechanical efforts which aim at altering the direction of its axis of rotation. Gyroscopic effects lead to counter-intuitive and even paradoxical dynamic behavior.
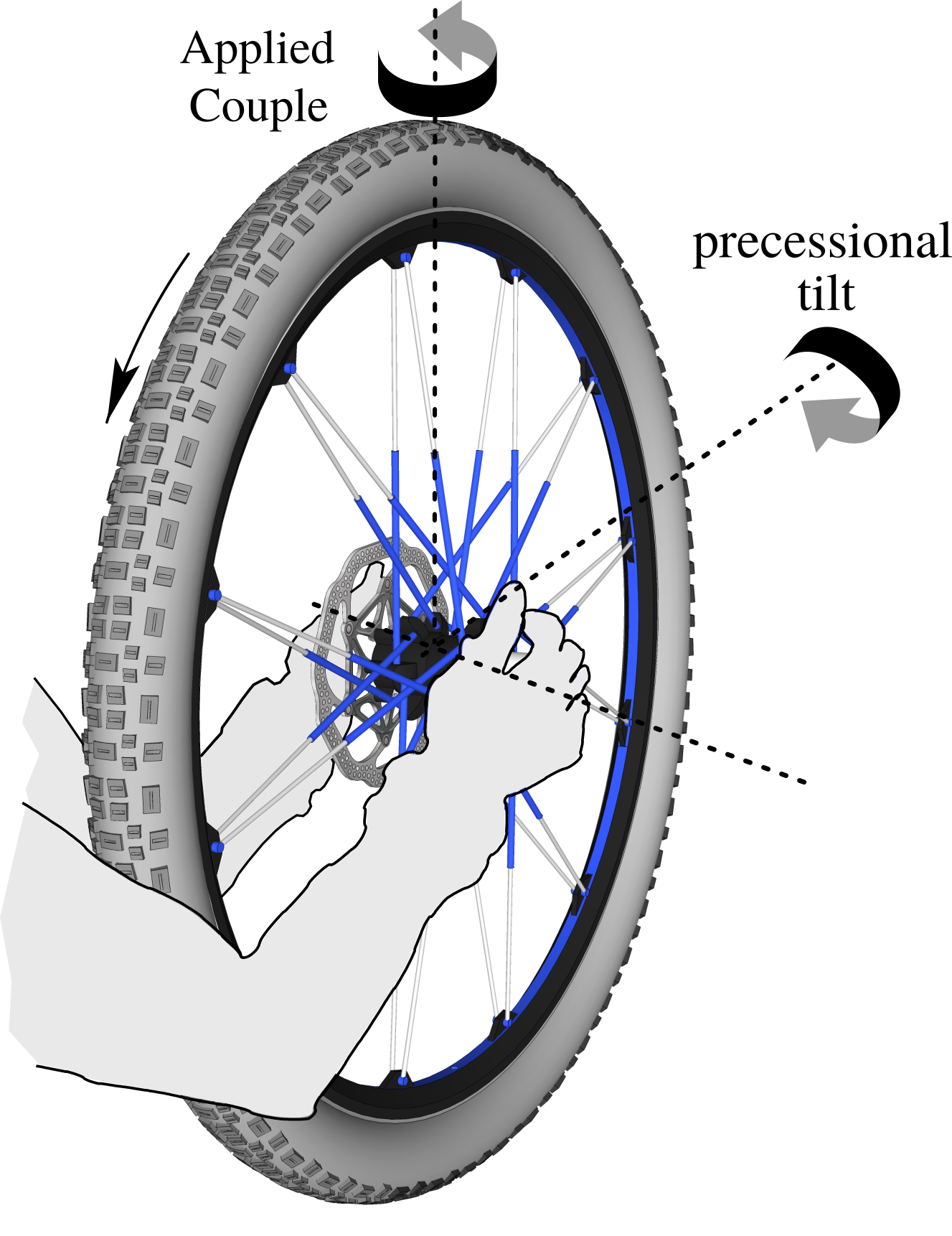
Consider the experiment shown in
Figure 15.0.1 . The experimenter holds a bicycle wheel which has been given a large spin about its axle. Upon trying to tilt the orientation of the axle, the experimenter immediately feels a strong resistance: this is known as
gyroscopic stiffness . Moreover, if he applies to the wheel a couple directed upward, thereby attempting to rotate the plane of the wheel to his left, the wheel then immediately reacts by rotating about a horizontal axis! This motion of the wheel is referred to as the
gyroscopic precession.
The goal of this chapter is to analyze the general laws which govern gyroscopic motions, as well as to illustrate gyroscopic phenomena taking place in mechanical systems.
Figure 15.0.1.