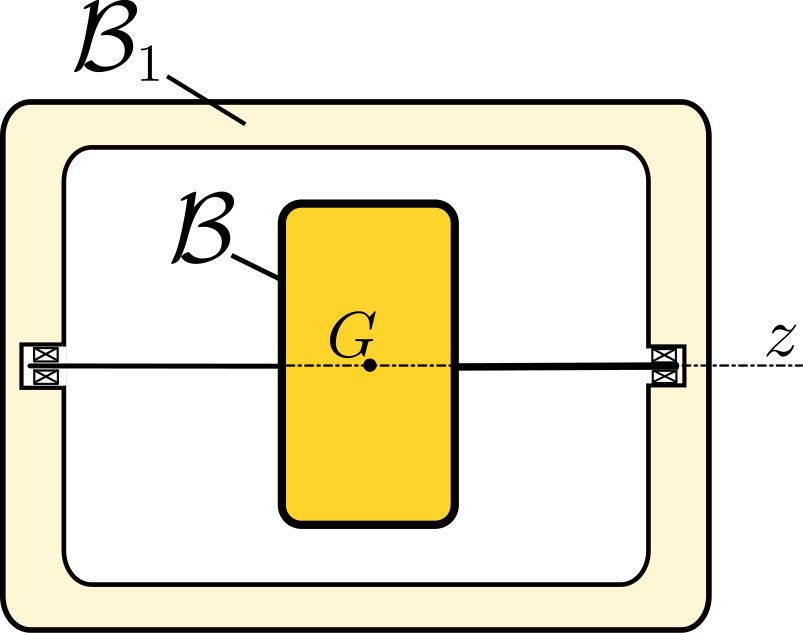
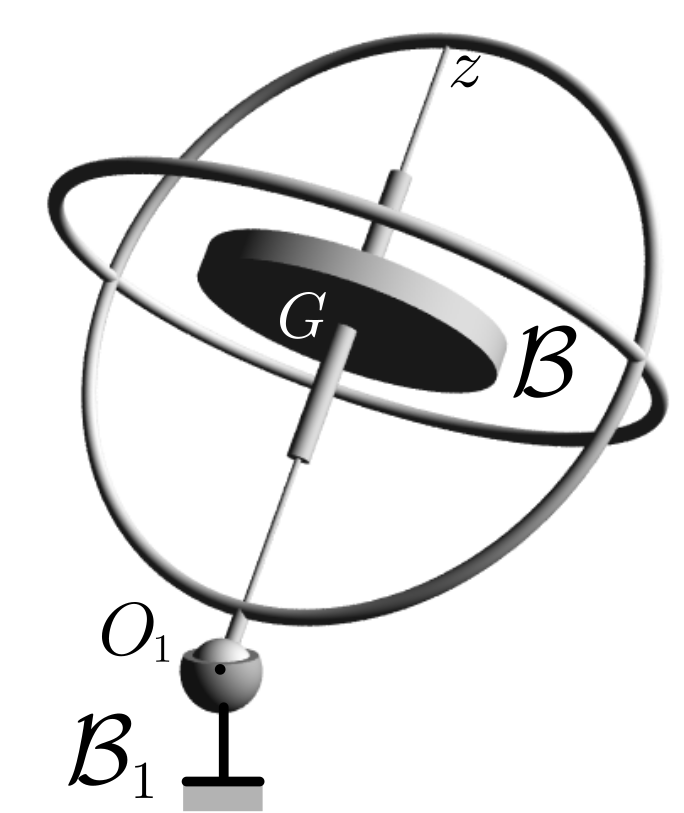
Definition 15.2.1. Gyroscope.
We call gyroscope a rigid body \(\cB\) in motion in a referential \(\cE\) with the following properties
- Body \(\cB\) is an axisymmetric rigid body with respect to some axis \((G, \bz)\) passing through its mass center \(G\text{.}\) Its inertia operator about \(G\) is characterized by an axial moment of inertia \(C\text{,}\) and a transverse moment of inertia \(A\text{:}\)\begin{equation} \cI_{G} ({\bf u}) = A ({\bf u} - ({\bf u}\cdot\bz) \bz ) + C ({\bf u} \cdot \bz) \bz\tag{15.2.1} \end{equation}for any vector \({\bf u}\text{.}\)
- The moment about axis \((G, \bz)\) of the external forces acting on \(\cB\) is zero:\begin{equation} \bM_{G , {\coB} \to \cB} \cdot \bz = 0 .\tag{15.2.2} \end{equation}
- Body \(\cB\) rotates with a large angular velocity \(\omega_z = \bom_{\cB / \cE} \cdot \bz\) about its axis.