The Fundamental Theorem of Dynamics (FTD) is the central result of the Newton-Euler formalism. As its derivation will show, the FTD has the widest range of applicability:
it applies to all material systems with constant mass, and in particular to systems of one or more rigid bodies,
it yields all equations (six scalar equations at most) needed to predict the motion of a system, if the external actions are prescribed.
other theorems will prove to be more specialized and will not yield as much information (equations) as the FTD.
Subsection11.2.1Derivation
The derivation is simple: it does not require the choice of a particular virtual velocity field \(P \mapsto \vv_P\text{.}\) We denote \(\{\cV^*\}\) the corresponding screw associated with this field:
We now recognize the last expression as the product (comoment) between arbitrary screw \(\{\cV^*\}\) and gravitational action screw \(\{ \cA^g_{\bSi \to \Si} \}\) and hence is independent of the choice of point \(A\text{.}\) Thus we have found:
Since this equation is true for all screws \(\{\cV^*\}\) we arrive at the FTD by using the following Lemma: If \(\{\cV^*\} \cdot \{\cU\} =\{0\}\) is true for all \(\{\cV^*\}\text{,}\) then \(\{\cU\} =\{0\}\text{.}\)
Theorem11.2.1.Fundamental Theorem of Dynamics.
In a Newtonian referential \(\cE\text{,}\) the external action screw exerted on a material system \(\Si\) of constant mass \(m\) and mass center \(G\) is equal to the dynamic screw of \(\Si\) relative to \(\cE\text{:}\)
where \(A\) is an arbitrary point, \(\bF_{\bSi\to\Si}\) is the total external resultant force, and \(\bM_{A,\bSi\to\Si}\) is the total external moment about \(A\) acting of \(\Si\text{.}\)
Some fundamental remarks are in order regarding the FTD:
Remark11.2.2.
In (11.2.6)-(11.2.7) we have written the equivalent form of the FTD by equating the resultants and the moments (about an arbitrary point \(A\)) of the action and dynamic screws. The corresponding two vector equations are traditionally referred to as Euler’s first and second principles.
Remark11.2.3.
The FTD provides at most six independent scalar equations. In particular, the moment equation \(\bD_{B, \Si /\cE} = \bM_{B,\bSi\to\Si}\) written about another point \(B\) provides three equations which are of course linear combinations of the previously found six equations.
Remark11.2.4.
The FTD can be applied to any material systems, and in particular to a system of (interconnected) rigid bodies \(\Si =\{\cB_1 , \cB_2 , \ldots, \cB_N\}\text{.}\) In this case, the FTD can be applied to each rigid body \(\cB_i\text{,}\) to the entire set \(\Si\text{,}\) or to a subset of \(\Si\) consisting of any combination of rigid bodies. For instance, if the FTD is applied to system \(\Si\text{,}\) the interactions between the rigid bodies of \(\Si\) drop out of the equations (the internal action and reaction screws cancel out): the FTD is then stated as
In the moment equation \(\bD_{A, \Si /\cE} = \bM_{A,\bSi\to\Si}\) the dynamic moment is determined in practice from the angular momentum of the system: recall the identity
Keep in mind that point \(A\) is an arbitrary point. In particular, when the dynamic moment \(\bD_A\) of a rigid body is related to its angular momentum \(\bH_A\text{,}\) point \(A\) is not necessarily attached to this rigid body. Finally, note that at mass center \(G\) of \(\Si\) we have
Refer to Chapter 9 for other ways to determine the dynamic moment \(\bD_{A, \Si /\cE}\text{.}\)
Remark11.2.6.
Suppose that the position of a system \(\Si\) of \(N\) rigid bodies relative to a Newtonian referential \(\cE\) is defined by \(M\) coordinates \(\bq \equiv (q_1 , q_2 , ... , q_M)\text{.}\) Application of the FTD leads to scalar equations of the type \(f(\ddbq, \dbq, \bq , t) =0\text{,}\) that is, non-linear second-order o.d.e.’s. These equations also involve known (prescribed) as well as unknown forces and moments. We call equation of motion of system \(\Si\) an equation of the type \(f(\ddbq, \dbq, \bq , t) =0\) which does not involve any unknown force or moment. We call first integral of motion of system \(\Si\) an equation of the type \(F(\dbq, \bq , t) = \text{constant}\) which can be obtained by integration of an equation of motion of \(\Si\text{.}\) If \(M\) first integrals of motion can be found, then the motion is entirely known analytically, since the unknown coordinates \(\bq\) can be obtained by simple quadratures from the first integrals.
Remark11.2.7.
Existence and uniqueness: given initial conditions \(\bq = \bq_0\) and \(\dbq = \dbq_0\) at time \(t= t_0\text{,}\) a unique solution \(\bq(t,\bq_0,\dbq_0)\) of the equations of motion must exist under general conditions of continuity of \(\partial f/\partial q_i\) and \(\partial f/\partial \dq_i\text{.}\)
Subsection11.2.2A Class of Newtonian Referentials
Let us assume that a Newtonian referential \(\cE\) exists. Under which condition will a referential \(\cF\) in motion relative to \(\cE\) also qualify as a Newtonian referential? Consider an arbitrary \(P\) of a material system \(\Si\text{.}\) According to the change of referential formula (6.3.2), we can write
for any point \(P\text{.}\) The transport and Coriolis accelerations drop out if referential \(\cF\) is in uniform rectilinear translation relative to \(\cE\)
In this case, equation (11.1.5) still holds, and \(\cF\) is also a Newtonian referential.
Theorem11.2.8.Newtonian referentials.
All Newtonian referentials are in uniform, rectilinear translation relative to one another.
In classical mechanics, we require that postulated physical laws such as the Principle of Virtual Power remain invariant under Galilean transformations, that is, transformations mapping a referential into another referential translating at constant velocity.
The choice of referential \(\cE\) in the application of the FTD depends on the particular problem at hand. No experiment has ever been devised to prove the existence of a Newtonian referential. However, comparisons between experimental measurements and application of the FTD can indicate the extent to which a given referential can safely be assumed Newtonian. For most studies, the use of a Terrestrial referential leads to negligible errors and such a referential is an acceptable approximation of a Newtonian referential. Nevertheless, for systems evolving on a large scale (such as satellites in orbit around the Earth) or evolving over long time interval (such as Foucault pendulum) or systems evolving at very high speed (such as high speed gyroscopes), it is more appropriate to apply the FTD relative to the Geocentric referential \(\cG\text{,}\) and hence accounting for Earth’s rotation. In more extreme cases such as in the motion of interplanetary probes, it is more appropriate to use the Heliocentric referential. In Chapter 16, we will learn how the FTD extends to a non-Newtonian referential.
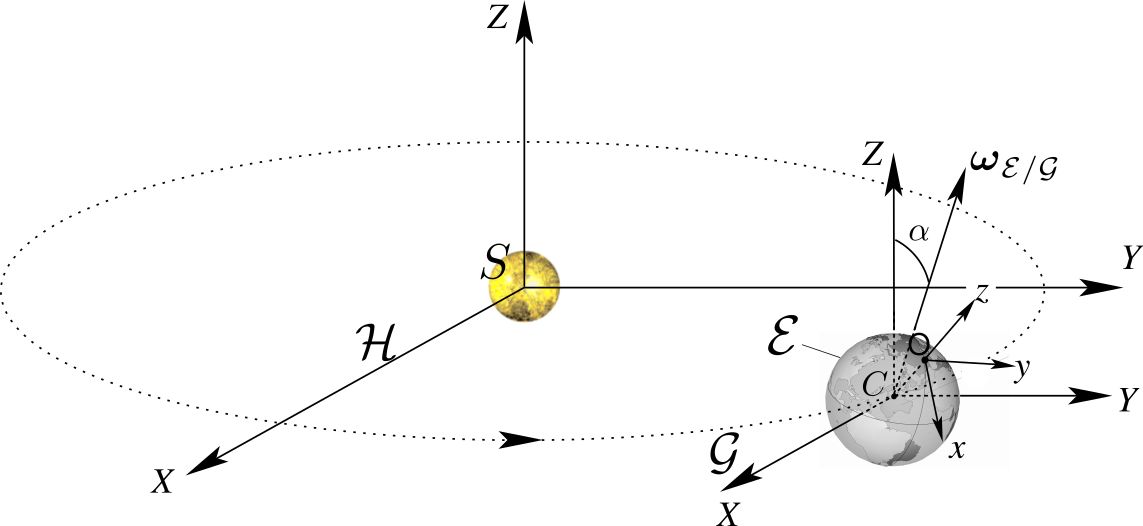
These three referentials are pictured on Figure 11.2.9:
Figure11.2.9.
The Heliocentric referential\(\cH\) is defined by the mass center \(S\) of the Sun, and by three axes \(SX\text{,}\)\(SY\) and \(SZ\) pointing toward points in space which remain “fixed” relative to \(S\text{.}\) More specifically, the axes \(SX\) and \(SY\) can be chosen into the plane, referred to as the ecliptic which contains the trajectory of center \(C\) of the Earth.
The Geocentric referential\(\cG\) is defined by the mass center \(C\) of the Earth, and by the axes \(CX\text{,}\)\(CY\) and \(CZ\) which remain parallel to the axes \(SX\text{,}\)\(SY\text{,}\)\(SZ\) of \(\cH\text{.}\) Hence referential \(\cG\) is in translation relative to \(\cH\text{,}\) that is, \(\bom_{\cG/\cH} = \bze\text{,}\) and its motion is specified by the acceleration \(\ba_{C/\cH}\) of center \(C\text{.}\) Its motion accounts for the orbital motion of Earth around the Sun. This orbit is elliptical with eccentricity \(e = 0.017\text{,}\) and can be considered quasicircular of radius \(R = 149,600,000\) km, and period \(T= 1\) year \(= 365.256\) days. By assuming the motion of \(C\) uniform, we readily find that the magnitude of \(\ba_{C/\cH}\) is approximately \(a_C = 5.94 \times 10^{-3}\) m/s\(^2\text{.}\) In reality, the distance from \(C\) to \(S\) varies from \(147.17 \times 10^6\) km (early in January) to \(153.18 \times 10^6\) km (end of July) and the speed of \(C\) (relative to \(\cH\)) varies from \(31\) km/s to \(28\) km/s. Given the small value of \(a_C\text{,}\) the non-Newtonian character of \(\cG\) can be considered quite weak for most applications.
The Terrestrial or Laboratory referential\(\cE\) attached to Earth with origin \(O\) taken at some fixed point of the surface of the Earth, axes \(Ox\text{,}\)\(Oy\) and \(Oz\) pointing southward, eastward, and upward, respectively. The motion of \(\cE\) relative to \(\cG\) is a rotation about the axis passing through the south and north poles, with angular velocity \(\bom_{\cE/\cG} = \bom_{\cE/\cH}\) of magnitude \(2\pi/(24\times 3600) = 7.27\times 10^{-5}\) rad/s, and directed along the axis of rotation from the south to the north poles. The direction of \(\bom_{\cE/\cG}\) is sensibly constant relative to the axis \(SZ\) normal to the ecliptic, making an angle \(\al = 23^{\rm o}27'\text{.}\) 1 Experiments show that \(\cE\) can be reasonably assumed Newtonian, as long as the extent and length of the motion are sufficiently small. We will assess the non-Newtonian character of referential \(\cE\) relative to referential \(\cG\) in Chapter 16.
Subsection11.2.4Examples
In this section, we solve a few examples to illustrate the use of the FTD. Whenever faced with a problem involving a single body in motion, the following steps should be conducted:
Parametrize the position of body \(\cB\) relative to Newtonian referential \(\cE\text{,}\) introduce all coordinates, corresponding unit vectors and rotation diagrams.
Determine the kinematic screw \(\{\cV_{\cB/\cE}\}\) and identify all geometric or kinematic constraints.
Given a description of the mass distribution of the body, find the kinetic screw \(\{\cH_{\cB/\cE}\}\text{.}\)
Identify all contributions to the external action screw \(\{ \cA_{\overline{\cB}\to \cB}\}\) exerted on the body.
Apply the FTD. Two possible solutions can be devised: (i) If all unknown are sought, then all 6 equations extracted from the FTD are needed, thus requiring all elements of the dynamic and action screws. (ii) If only specific limited information is required, then the FTD will be applied carefully by figuring out how to extract this information without full knowledge of the dynamic/action screws.
Example11.2.10.
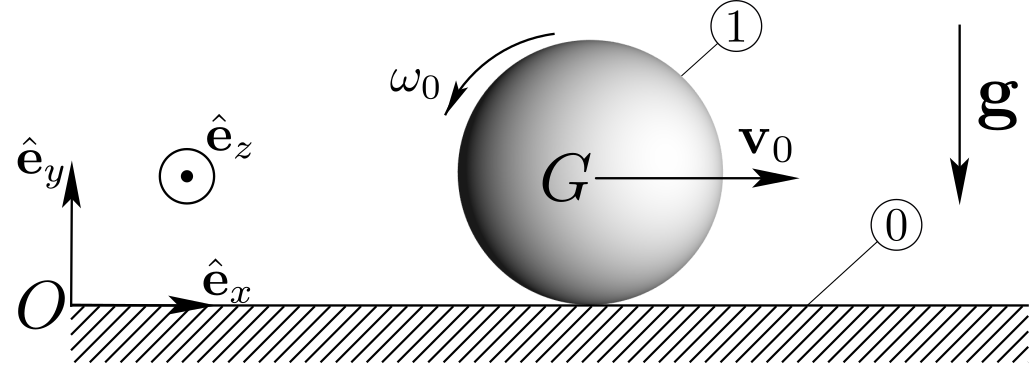
A homogeneous, spherical ball 1 of mass \(m\) and radius \(r\) is thrown on a horizontal straight support \(Ox\) of a Newtonian referential 0. Its mass center \(G\) has initial velocity \(\vel_0 = v_0 \be_x\) (\(v_0 \gt 0\)) and its initial angular velocity is \(\bom = \om_0 \be_z\) (\(\om_0 \gt 0\)). The contact is characterized by the coefficient of kinetic friction \(\mu\text{.}\) Rolling friction is neglected. See Figure 11.2.11.
Figure11.2.11.
Show that the ball initially slips until time \(t_1\) given by
What happens at time \(t = t_1\text{.}\) Does the sphere move forward or backward?
Find the velocity of \(G\) and the ball’s angular velocity at time \(t \geq t_1\text{.}\) Describe the motion of the ball.
Solution.
a. The kinematics of the ball relative to referential 0\((O,\be_x , \be_y , \be_z)\) is entirely specified by the velocity \(\vel_G = v (t) \be_x\) of its mass center, and by its angular velocity \(\bom = \om (t) \be_z\text{.}\) Its slip velocity is given by
\begin{equation*}
\vel_{I \in 1/0} = \vel_G + \bom \times \br_{GI} = (v + r \om ) \be_x
\qquad{(1)}
\end{equation*}
At time \(t=0\text{,}\) the slip velocity takes the expression \(\vel_{I\in 1/0} = (v_0 + r\om_0) \be_x\text{.}\) Since \((v_0+ r\om_0 ) \neq 0\text{,}\) the sphere initially slips, and we can assume that the initial phase of motion is also characterized by slipping. The external forces acting on the ball are:
the gravitational force \(m \bg\) applied at mass center \(G\text{,}\) and
the reaction force \(\bR = F \be_x + N \be_y\) applied at the contact point \(I\text{,}\) neglecting rolling friction.
We have obtained 3 equations solving for 4 unknowns \(v\text{,}\)\(\om\text{,}\)\(F\) and \(N\text{.}\) We need one more equation. It is given by Coulomb law: \(|F| = \mu N\text{,}\) the friction force \(F \be_x\) being always opposed to the slip velocity \(\vel_{I\in 1/0}\text{:}\)\(F \be_x \cdot \vel_{I\in 1/0} \lt 0\text{.}\) Since initially \((v_0 + r \om_0) \gt 0\text{,}\) the slip velocity has the direction of \(+\be_x\text{,}\) as long as the ball slips. This shows that \(F \lt 0\text{:}\)\(|F| = -F = \mu N = \mu mg\text{.}\) Now we can solve equations (2-4):
Time \(t_1\) corresponds the start of the no-slip phase of motion of the ball: once it stops slipping, it continues to roll without slipping. At time \(t=t_1\text{,}\)\(G\) takes the velocity
\begin{equation*}
v_1 = v_0 - \mu g t_1 = \tfrac{1}{7} (5v_0 -2 r \om_0)
\end{equation*}
if \(v_0 \gt \tfrac{2}{5} r \om_0\text{,}\) the ball rolls forward: \(v_1 \gt 0\) and \(\om_1 \lt 0\text{.}\)
if \(v_0 = \tfrac{2}{5} r \om_0\text{,}\) the ball stops: \(v_1 = 0\text{,}\)\(\om_1 =0\text{.}\)
if \(v_0 \lt \tfrac{2}{5} r \om_0\text{,}\) the ball rolls backward: \(v_1 \lt 0\) and \(\om_1 \gt 0\text{.}\)
Remark11.2.12.
We could have applied the moment equation about \(I\) instead of \(G\) to find: \(\bD_I = \bM_I = \bze\text{,}\) leading to \(d \bH_I /dt + \vel_I \times \vel_G = \bze\text{.}\) With \(\vel_I =\vel_G = v\be_x\text{,}\) we find that \(d \bH_I /dt = \bze\text{:}\)the angular momentum about I is conserved. With \(\bH_I = \bH_G + m \vel_G \times \br_{GI} = mr ( {2\over 5} r\om - v) \be_z\text{,}\) we find
b. For \(t \geq t_1\text{,}\)the ball rolls without slipping:\(\vel_{I\in 1/0} = \bze\text{.}\) The translational and rotational motion of \(\cS\) are now coupled:
\begin{equation*}
v = - r\om , \qquad t \geq t_1 \qquad (5)
\end{equation*}
The motion is still governed by the equations (2-4). Now with equation (5), we find
\begin{equation*}
F = m \dv = - mr \dom = \tfrac{2}{5}mr \dom
\end{equation*}
\begin{equation*}
v = v_1 , \qquad t \geq t_1
\end{equation*}
and
\begin{equation*}
F = 0 .
\end{equation*}
The friction force vanishes during the no-slip phase of the sphere which evolves with constant linear and angular velocity! Note that the condition \(|F| \lt \mu_k N\) is satisfied by the reaction force. These results can be made more realistic by adding the effect of rolling friction.
Remark11.2.13.
The friction force \(F \be_x\) is not necessarily opposed to \(\vel_G\text{:}\) assume that the initial conditions are such that \((v_0 + r \om_0 ) \lt 0\) (with sufficiently strong forward spin \(\om_0 \lt 0\)). Then the slip velocity is directed along \((-\be_x)\text{:}\) the friction force is directed along \((+\be_x)\text{,}\) that is, \(F \gt 0\text{.}\)
Example11.2.14.
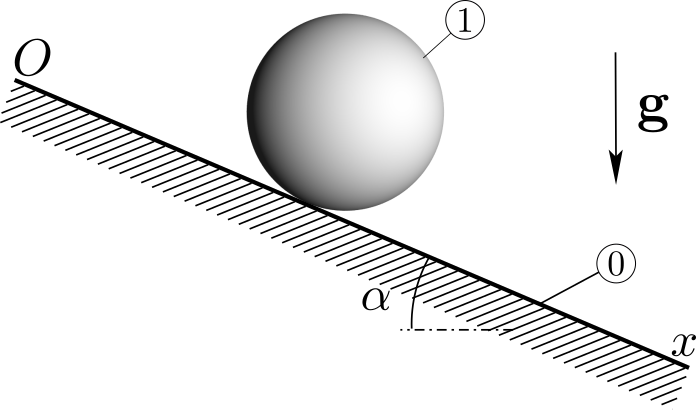
A spherical ball 1 of uniform mass \(m\) and radius \(r\) is released without initial speed on a support \(Ox\) inclined with the horizontal with angle \(\alpha\text{.}\) The contact is characterized by the coefficient of static and kinetic friction \(\mu_s\approx \mu_k = \mu\text{.}\)
Figure11.2.15.
Part 1: We neglect rolling friction. Immediately upon its release, the ball may begin to roll with or without slipping depending on the value of angle \(\alpha\text{.}\)
Assume that the ball begins to roll without slipping. Describe its motion. In particular, find the reaction force of the support on the ball. Conclude that such a motion is possible only if
Assume now \(\mu \lt \tfrac{2}{7} \tan\alpha\text{,}\) so that the ball begins to slip immediately upon its release. Find the velocity \(\vel_G\) of its mass center \(G\) and its angular velocity \(\bom\text{.}\) Describe its motion. Can it eventually stop slipping?
Part 2: We now account for rolling friction. Denote by \(k\) the coefficient of rolling friction. Assume that \({k\over r} \ll \mu\text{.}\) Examine under which conditions
the ball rolls without slipping,
the ball slips without rolling,
the ball rolls and slips.
Solution.
Part 1.
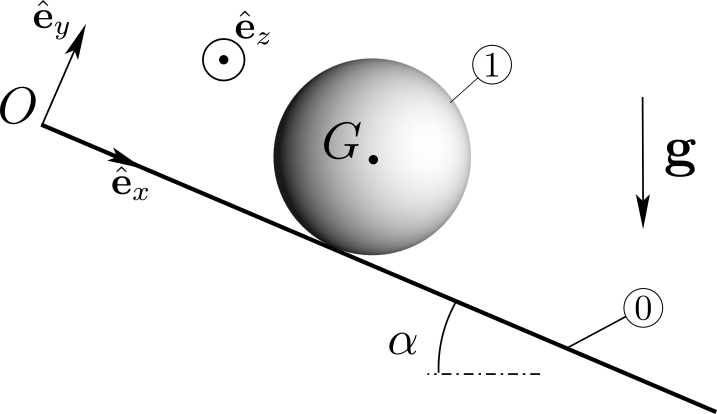
1a. The ball’s kinematics in referential 0\((O, \be_x , \be_y , \be_z)\) is entirely specified by the velocity \(\vel_G = v_G (t) \be_x\text{,}\) and by its the angular velocity \(\bom = \om (t) \be_z\text{.}\) Then its slip velocity is given by
If the ball rolls without slipping, then \(v_G + r \om = 0\text{,}\) and by differentiation w.r.t. time we find
\begin{equation*}
\dv_G + r \dom = 0 \qquad{(1)}
\end{equation*}
The external forces acting on 1 are (i) the gravitational force \(m \bg\) applied at mass center \(G\text{,}\) (ii) the reaction force \(\bR = F \be_x + N \be_y\) applied at the contact point \(I\text{,}\) assuming sliding friction only.
Figure11.2.16.
Application of the FTD \(\{\cA_{ \bar{1}\to 1 }\} = \{ \cD _{1 /0} \}\) gives:
(i) the resultant equation \(m \ba_G = m \bg + \bR\text{,}\) or by projection on \((\be_x , \be_y )\)
\begin{equation*}
m \dot{v}_G = F + mg \sin\alpha \qquad{(2)}
\end{equation*}
\begin{equation*}
N - mg \cos\alpha = 0 \qquad{(3)}
\end{equation*}
(ii) the moment equation \(\bD_G = \bM_G\) about point \(G\text{:}\)
\begin{equation*}
\tfrac{2}{5} mr^2 \dom = r F \qquad{(4)}
\end{equation*}
We have obtained 4 equations (1-4) solving for 4 unknowns \(v_G\text{,}\)\(\om\text{,}\)\(F\) and \(N\text{.}\) These equations are easily solved:
\begin{equation*}
\dv_G = \tfrac{5}{7} g \sin\al , \quad
\dom = - \tfrac{5}{7} {g \over r} \sin\al, \quad
F = - \frac{2}{7} mg \sin\al, \quad
N = m g \cos\al
\end{equation*}
This shows that the motion is uniformly accelerated in both translation and rotation. Since \(v_G =0\) and \(\om = 0\) at time \(t=0\text{,}\) we obtain by integration
which shows that the motion is independent of the coefficient of friction \(\mu\text{.}\) The no-slip motion of the ball is valid as long as \(| F | \leq \mu N\text{.}\) This gives the time-independent condition between \(\mu\) and \(\tan\alpha\text{.:}\)
Since \(F\) and \(N\) remain constant during the motion, the no-slip motion must continue indefinitely.
1b. If \(\mu \lt \tfrac{2}{7} \tan\alpha\text{,}\) the ball must begin to roll and slip. We must have \(\vel_{I \in 1/0} = ( v_G + r\om) \be_x \neq \bze\) for \(t \gt 0\text{.}\) Even though we expect \(v_G \gt 0\) and \(\om \lt 0\) for \(t \gt 0\text{,}\) we assume that the quantity \(( v_G + r \om )\) is positive, that is, we assume that the slip velocity has the direction of \(\be_x\text{,}\) as long as the ball slips.
In this case, for the friction force \(F \be_x\) to oppose the slip velocity \(\vel_{I\in 1/0}\text{,}\) we must have, according to Coulomb law, \(|F| = -F = \mu N\text{.}\)
Equations (2-4) are now replaced by
\begin{equation*}
N = mg \cos\alpha , \quad m \dot{v}_G = mg (\sin\al - \mu \cos\alpha)
\end{equation*}
\begin{equation*}
\tfrac{2}{5} mr^2 \dom = - \mu r N = - \mu mg r \cos\al
\end{equation*}
leading by integration to
\begin{equation*}
v_G (t) = g (\sin\al - \mu \cos\alpha) t , \qquad
\om (t) = - \tfrac{5}{2r} \mu g t \cos\al
\end{equation*}
Once again the motion is uniformly accelerated in both translation and rotation. But in this case the motion depends on the friction coefficient. We must check a posteriori the direction of the slip velocity. We find the expression
\begin{equation*}
\vel_{I \in 1/0} = (v_G + r \om ) \be_x = g (\sin\al - \tfrac{7}{2} \mu\cos\al ) t
\end{equation*}
Given the condition \(\mu \lt \tfrac{2}{7} \tan\alpha\text{,}\) our assumption that the slip-velocity is directed along \((+ \be_x )\) was correct. Furthermore, the slip velocity increases monotonically: the ball rolls and slips indefinitely.
Part 2. If we account for rolling friction, then the contact action screw \(\{\cA_{0\to 1}^c\}\) now takes the form
\begin{equation*}
\{\cA_{\cE\to \cS}^c\} =
\left\{
\begin{array}{c}
N \be_y + F \be_x \\
M_I \be_z
\end{array}
\right\}_I
\end{equation*}
where according to the laws of rolling friction:
(i) if \(\bom = {\bf 0}\) (no rolling), then \(| M_I | \leq k N\text{,}\) (ii) if \(\bom = \om \be_z \neq \bze\text{,}\) then \(| M_I | = k N , \qquad M_I \om \lt 0\text{,}\) Equations (2-4) are now replaced by
\begin{equation*}
N = mg \cos\alpha , \quad
m \dot{v}_G = F + mg \sin\alpha , \quad
{2\over 5} mr^2 \dom = r F+ M_I
\end{equation*}
The analysis then depends upon whether the ball rolls and/or slips.
2a.The ball rolls without slipping. Hence \(\om \neq 0\) and \(v_G + r \om = 0\) and \(| M_I | = k N\) with \(M_I \om \lt 0\text{.}\) We then find
\begin{equation*}
F = - \tfrac{2}{7} mg \sin\al - \tfrac{5}{7 r} M_I , \quad
N= mg \cos\al , \quad
| M_I | = k N, \quad M_I \om \lt 0
\end{equation*}
Since \(\om =0\) at \(t=0\text{,}\) the sign of \(\om\) must be that taken by \(\dom\text{,}\) that is, the sign of \((rF+M_I) = \tfrac{2}{7}(M_I - mg r \sin\al)\text{.}\) In fact, just as in Part I (no rolling friction), the equations of motion show that \(\dom = \text{constant}\text{,}\) leading to \(\om = \dom t\text{.}\) The condition \(M_I \om \lt 0\) is equivalent to \(M_I (M_I - mg r \sin\al) \lt 0\) which implies that
\begin{equation*}
0 \lt M_I \lt mg r \sin\al
\end{equation*}
Now we can set \(| M_I |= M_I = kN = k mg \cos\al\text{.}\) This then implies the condition of rolling without slipping}
We still have to verify that \(|F| \lt \mu N\) for no-slip to be guaranteed: we find the condition \(\tan\al \lt \tfrac{7}{2} \mu - \tfrac{5}{2} {k\over r}\text{.}\) Finally we conclude that the ball rolls without slipping as long as the condition
is satisfied. It is readily verified that this no-slip rolling motion must continue indefinitely.
2b. The ball slips without rolling. Now we assume \(\om =0\) for \(t\geq 0\) and the inequality \(| M_I | \leq k N\) must be satisfied. We can solve for \(M_I\) and \(N\) from the equations
\begin{equation*}
N = mg \cos\alpha , \quad
m \dot{v}_G = F + mg \sin\alpha , \quad
r F + M_I =0 , \quad
|F| = \mu mg \cos\alpha
\end{equation*}
which implies that \(|M_I| = r \mu mg \cos\alpha\) and the condition \({k\over r} \geq \mu\) which is not physically possible: the ball cannot slip without rolling.
2c. The ball rolls and slips. This implies that the conditions of case 1 are not satisfied. Let us assume that
Now we must impose \(|F| = \mu N\) and \(| M_I | = k N\) with \(F (v_G + r \om) \lt 0\) and \(M_I \om \lt 0\text{.}\) We proceed as in case 1b, rolling friction being a small perturbation of sliding friction. Hence we assume that for \(t \gt 0\text{,}\)\(v_G \gt 0\text{,}\)\(\om \lt 0\) and \(v_G + r \om \gt 0\text{.}\) We will verify a posteriori that these assumptions are correct. Then, this imposes \(M_I \gt 0\) and \(F \lt 0\text{:}\)
\begin{equation*}
M_I = k mg \cos\al , \qquad F = - \mu mg \cos\al
\end{equation*}
To impose \(v_G \gt 0\) and \(\om \lt 0\) we must have \(\tan\al \gt \mu\) and \(k/r \lt \mu\text{:}\) both conditions are satisfied. We can now determine the rate of change of the slip velocity
\begin{equation*}
\dv_G + r \dom = g \cos\al (\tan\al - \tfrac{7}{2}\mu + \tfrac{5}{2} {k\over r})
\end{equation*}
We now verify that \(v_G + r \om \gt 0\text{.}\) We conclude that the ball rolls and slips if the condition
Finally the case \(\tan\al \leq {k \over r}\) must be considered: it is easy to verify that in this case the ball remains fixed.
Example11.2.17.
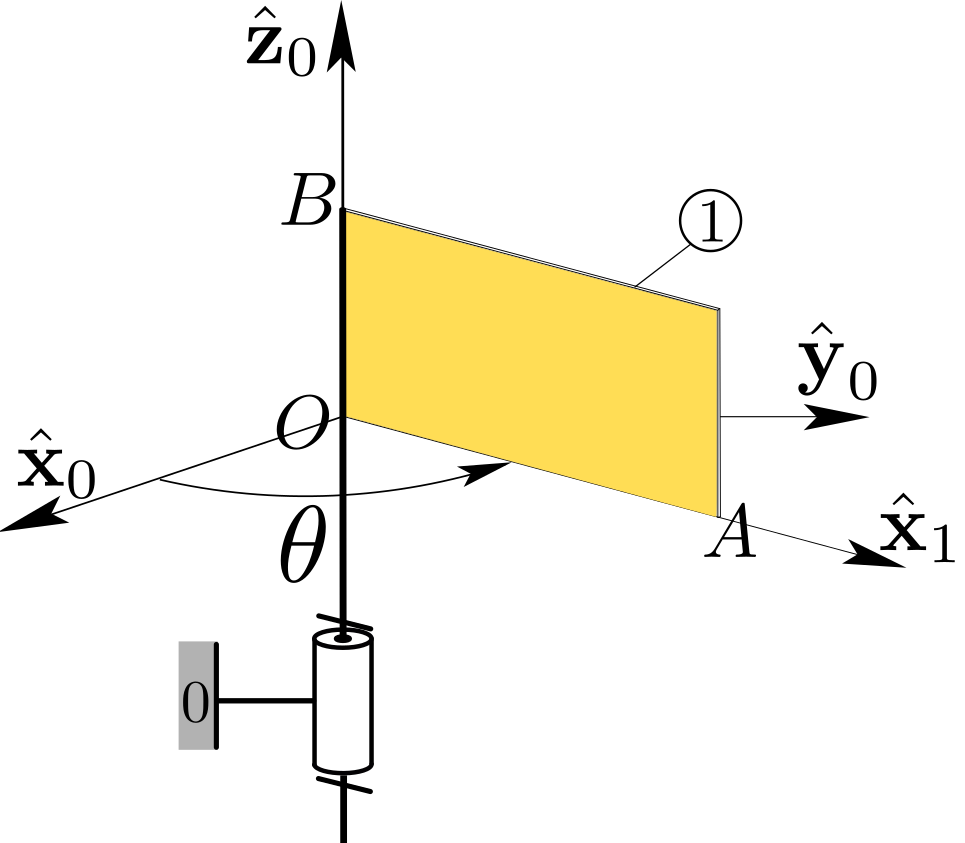
Consider rigid body 1 of Example 9.9.1. It is constrained to rotate about a vertical fixed axis \((O, \bz_0)\) of a referential 0. Body 1 is in the shape of a rectangular plate \(OAB\) (of negligible thickness) of uniformly distributed mass \(m\text{,}\) with \(\br_{OB} = b \bz_0\) and \(\br_{OA} = a \bx_1\text{.}\) See Figure 11.2.18.
The pivot connecting 0 and 1 is assumed frictionless. A motor \(\cM\) is mounted between 0 and 1 and its action on 1 is equivalent to a constant couple \(\cC \bz_0\text{.}\) In addition, the ambient fluid exerts a viscous force \(d \bF (P) = - \mu \vel_{P/0} dA\) on an element of area \(dA\) surrounding a point \(P\) of the plate, where \(\mu\) is a positive constant.
Figure11.2.18.
After finding the kinematic, kinetic and dynamic screws of the plate, determine the external action screw \(\{ \cA_{\bar{1}\to 1} \}\) exerted on the plate.
Apply the FTD to find the equation of motion and the unknown contact action screw \(\{\cA_{0 \to 1}^c \}\) transmitted through the frictionless pivot. Can a steady regime of rotation be established?
Solution.
a. The kinematic and kinetic screws of the plate take the form (see Example 9.9.1 for details):
\begin{equation*}
\{ {\cal V} _{1 / 0 } \} =
\left\{
\begin{array}{c}
\dte \bz_0 \\
\bze
\end{array}
\right\}_O
\quad
\{ {\cal H} _{1 / 0 } \} =
\left\{
\begin{array}{c}
m a \dte \by_1 \\
m a \dte ( -b \bx_1 + \tfrac{4}{3} a \bz_0)
\end{array}
\right\}_O
\end{equation*}
from which we obtain the expression of its dynamic screw
\begin{equation*}
\{ {\cal D} _{1 / 0 } \} =
\left\{
\begin{array}{c}
m a (\ddte \by_1 - \dte^2 \bx_1) \\
m a ( -b\ddte \bx_1 -b \dte^2 \by_1 + \tfrac{4}{3} a\ddte \bz_0)
\end{array}
\right\}_O
\end{equation*}
The external action screw \(\{ \cA_{\bar{1}\to 1} \}\) exerted on body 1 is the sum \(\{\cA^g_{\text{Earth}\to 1}\}+ \{\cA_{ 0 \to 1}^c \}
+\{\cA_{\text{fluid}\to 1} \} + \{\cA_{\cM\to 1}\}\)
We have taken into account the frictionless nature of the joint between body 1 and its support 0: \(\bM^c_{O, 0\to 1}\cdot \bz_0 = 0\text{.}\) We need to determine \(\{\cA_{\text{fluid}\to 1} \}\) by integration of the local surface force field:
It is then readily recognized that this last expression is related to the kinetic screw \(\{ {\cal H} _{1 / 0 } \}\) according to
\begin{equation*}
\left\{\cA_{\text{fluid}\to 1} \right\} = - {\mu ab \over m} \{ {\cal H} _{1 / 0 } \}
=
- \mu ab
\left\{
\begin{array}{c}
a \dte \by_1 \\
a \dte ( -b \bx_1 + \tfrac{4}{3} a \bz_0)
\end{array}
\right\}_O
\end{equation*}
b. Now application of the FTD \(\{ {\cal D}_{1 / 0 } \} =\{\cA_{\bar{1}\to 1}\}\) by resolving all screws about point \(O\) (indeed we need to take into account \(\bM^c_{O, 0\to 1}\cdot \bz_0 = 0\)) leads to two equations:
\begin{equation*}
m a (\ddte \by_1 - \dte^2 \bx_1) = - mg \bz_0 + \bR^c_{0\to 1}
- \mu a^2 b \dte \by_1
\end{equation*}
\begin{align*}
m a ( -b\ddte \bx_1 -b \dte^2 \by_1 + \tfrac{4}{3} a\ddte \bz_0) =
\amp - \br_{OG}\times m g \bz_0 + \bM^c_{O, 0\to 1}\\
\amp - \mu a^2 b \dte ( -b \bx_1 + \tfrac{4}{3} a \bz_0) + \cC\bz_0
\end{align*}
This gives:
(i) the resultant \(\bR^c_{0\to 1} = P\bx_1+Q\by_1 +R\bz_0 \) of the contact forces transmitted through the pivot
\begin{equation*}
P = - ma \dte^2 , \qquad Q = m a \ddte + \mu a^2 b \dte , \qquad R= mg
\end{equation*}
(ii) the moment \(\bM^c_{O, 0\to 1}= M\bx_1 +N \by_1\) about \(O\) of these forces
\begin{equation*}
M = - m ab\ddte - \mu a^2 b^2 \dte , \qquad
N= - m g a - m ab \dte^2
\end{equation*}
(iii) the equation of motion
\begin{equation*}
m a^2 \ddte + \tfrac{4}{3} \mu a^3 b \, \dte = \cC
\end{equation*}
This last equation shows that a steady regime can be established at angular speed
Note that even in a steady regime, there is a non-zero resultant reaction force and a resultant moment: the rigid plate is not balanced dynamically. See Section 11.5 on the method to achieve dynamic balancing.
Example11.2.19.
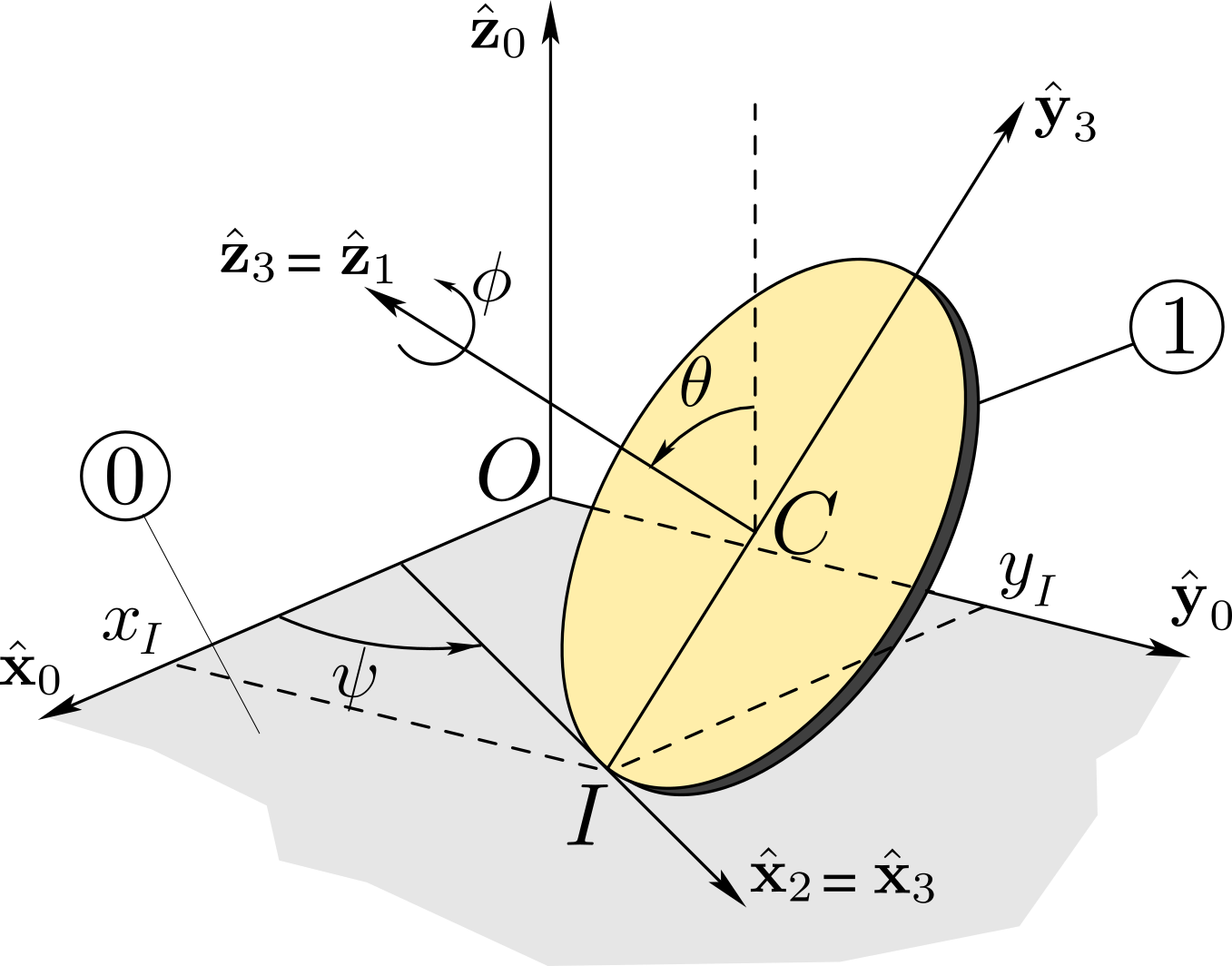
A circular disk 1 of center \(C\text{,}\) radius \(R\) and uniform mass is in motion on a planar horizontal support \((O, \, \bx_0,\by_0)\) in a referential 0\((O, \, \bx_{0},\by_{0},\bz_{0})\text{.}\) See Figure 11.2.20. A basis \(b_3 (\bx_{3},\by_{3},\bz_{3})\) is defined as follows:
the line \((I, \, \bx_3)\) is the tangent at the point of contact \(I\) to the edge of the disk.
the line \((I, \, \by_3)\) is the line connecting \(I\) and \(C\text{.}\)
the line \((C, \, \bz_3)\) is normal to the plane of the disk.
Figure11.2.20.
Basis \(b_1 (\bx_{1},\by_{1},\bz_1 = \bz_3)\) attached to the disk is obtained from basis \(b_0 ( \bx_0,\by_0, \bz_0)\) by the following sequence of rotations
Assume that the initial conditions are such that the disk initially rolls without slipping on the horizontal plane. It is then physically acceptable to assume that the disk will not slip subsequently. Neglect rolling and pivoting friction can be neglected.
Derive the equations of motions governing the coordinates \(x\text{,}\)\(y\text{,}\)\(\psi\text{,}\)\(\te\text{,}\)\(\phi\text{.}\) Then find the unknown reaction force of the support on the disk.
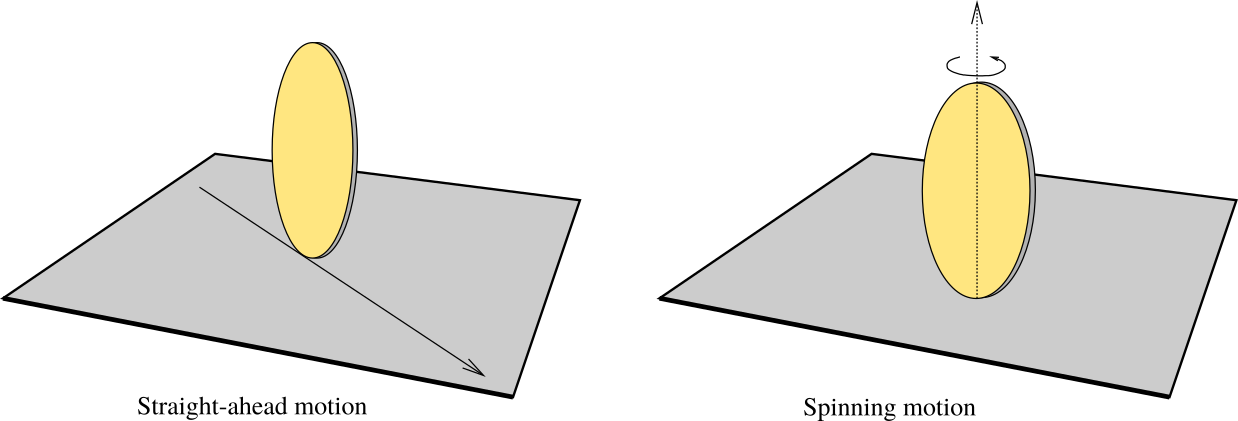
Show that the disk can have a “straight-ahead” motion during which it remains vertical and rolls at constant angular velocity \(\dphi_0\text{.}\) Under which condition is such a motion stable?
Show that the disk can have a “spinning motion” about one of its stationary, vertical diameter at constant angular velocity \(\dpsi_0\text{.}\) Under which condition is such a motion stable?
Solution.
a. With the notations of Figure 11.2.20, we find the following kinematic screw of the disk relative to referential 0=
where the friction force \(\bF\) lies in the horizontal plane, and must satisfy \(| \bF | \leq \mu_k N\) (\(\mu_k\) is the coefficient of kinetic friction). We have neglected spinning and rolling friction.
There are eight unknowns in this problem: \(x\text{,}\)\(y\text{,}\)\(\psi\text{,}\)\(\te\text{,}\)\(\phi\text{,}\)\(N\text{,}\)\(\bF\text{.}\) The first two equations are given by the non-holonomic constraint equations (no-slip at \(I\)).
\begin{align*}
\end{align*}
Application of the FTD to the disk gives \(\{\cD_{1/0} \} = \{\cA_{\bar{1} \to 1}\}\) leads to six scalar equations:
the resultant equation would allow the determination of \(N\) and \(\bF\) once acceleration \(\ba_C\) is found
\begin{equation*}
\bF +(N-mg) \bz_0 = m \ba_C \qquad{(3)}
\end{equation*}
the moment equation \(\bD_I = \bM_{I, \bar{1} \to 1}\) about point \(I\) eliminates the contribution of the reaction force \(N\bz_0 + \bF\) and results in three equations of motion governing \(\psi\text{,}\)\(\te\) and \(\phi\) which in turn would determine the motion of center \(C\) and \(\ba_C\) through the use of (1-2).
The moment equation about \(I\) gives
\begin{equation*}
\bD_I = {d \over dt}\bH_I + \vel_I \times m \vel_C =
\br_{IC}\times (-m g \bz_0) = - mg R \cos\te \bx_3
\end{equation*}
Note that \(\vel_I = \vel_{I/0}\) is not equal to \(\vel_{I\in 1/0}\) but rather
We can then find the contact resultant force \(\bF + N \bz_0 = mg (\bz_0 + m \ba_C)\) according to (3). Note that the no-slip assumption remains valid as long as \(|\bF | \leq \mu_k N\text{.}\) If this condition is satisfied at \(t=0\text{,}\) it is likely satisfied for all \(t\gt 0\text{.}\)
b. It is easy to show that the motion characterized by
is a solution of equations (4-6). It represents a vertical disk rolling ``straight-ahead’’ with constant (rolling) angular velocity \(\dphi_0\text{.}\) See Figure 11.2.21(left). It is physically plausible that if \(\dphi_0\) is sufficiently large, this motion of the disk is stable to small perturbations: the small deviations from this steady motion will stay bounded. To show this, we study the fate of the small perturbations \(\ep (t) = \pi/2 - \te\) by linearizing the equations of motion (4-6): from (5) we find to leading order
which gives the evolution of the small perturbations of the trajectory of \(C\) from the straight path. It is then straightforward to obtain the stability condition of the “straight-ahead” motion:
where \(\psi_0\text{,}\)\(\dpsi_0\) and \(\phi_0\) are constant. See Figure 11.2.21(right). This represents the “spinning” motion of the disk about one of its stationary vertical diameter with constant spinning angular velocity \(\dpsi_0\text{.}\) Once again, we can obtain linear equations for the small perturbations \((\phi , \ep = {\pi\over 2} - \te)\text{:}\)
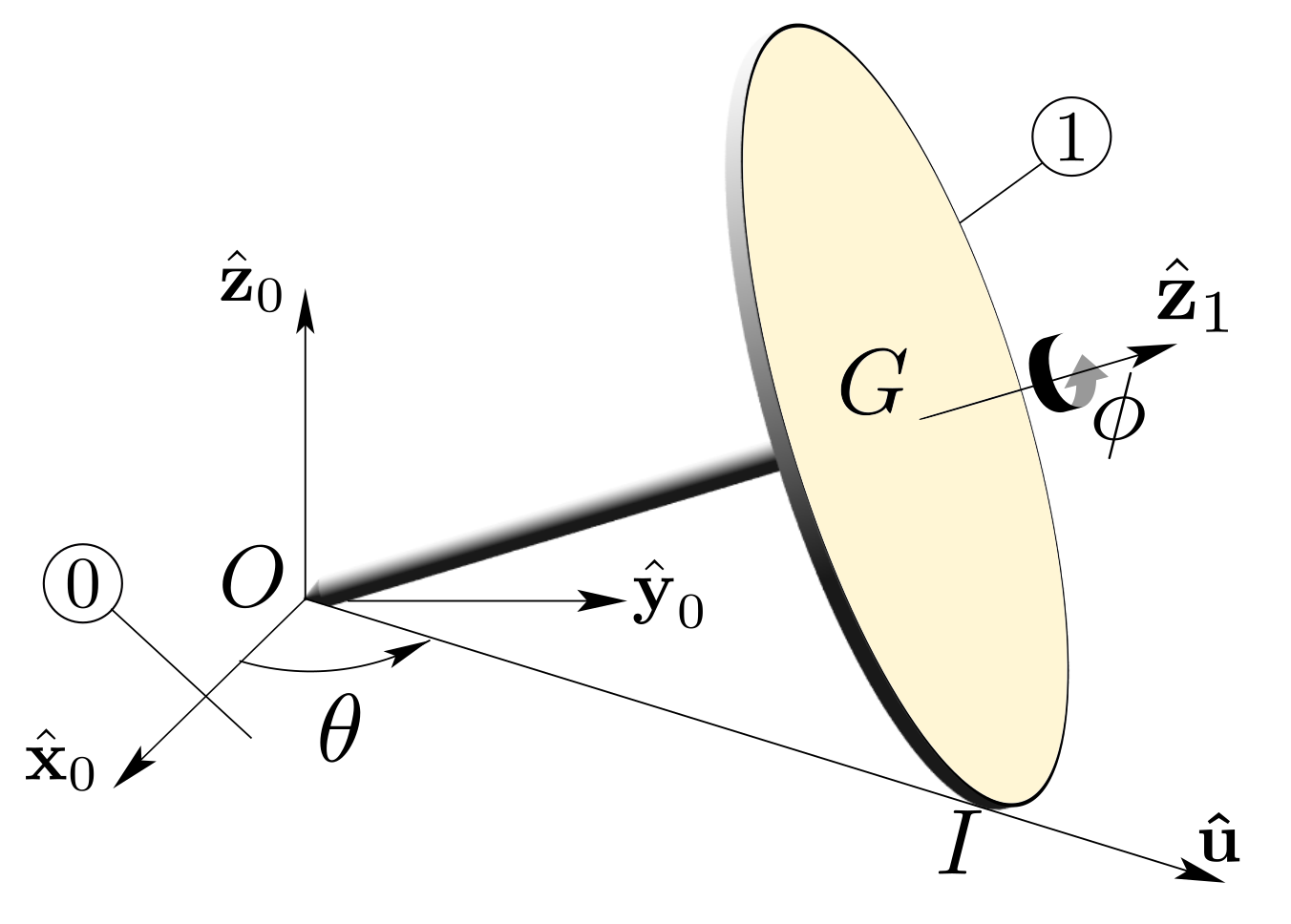
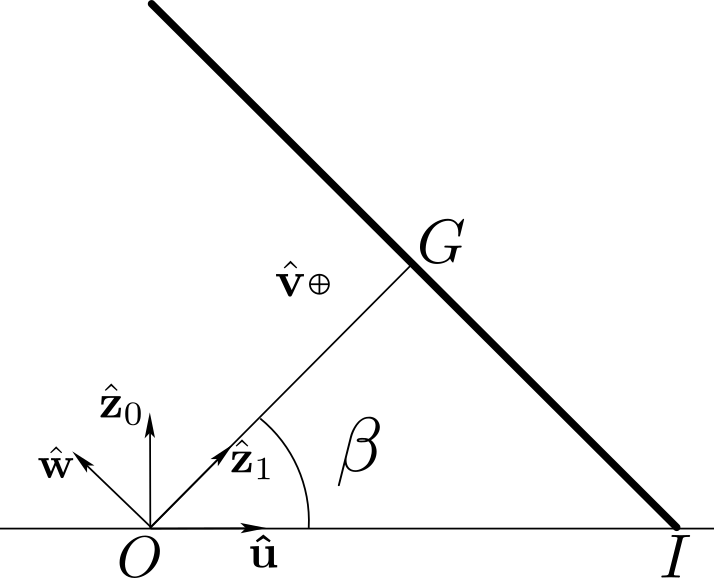
A disk 1 of mass center \(G\text{,}\) mass \(m\text{,}\) and radius \(r\) is in motion on the horizontal plane \(\Pi (O, \bx_0, \by_0)\) of referential 0 in such a way that the unconstrained extremity \(O\) of its massless axle \(OG\) remains fixed in the plane \(\Pi\text{.}\) See Figure 11.2.23.
Figure11.2.23.
Hence, the center \(G\) travels along a horizontal circle. We assume that there is sufficient friction between the disk and its support to prevent slipping at both \(O\) and \(I\text{.}\) The motion is then described by the two variable angles \(\theta (t)\) and \(\phi (t)\) which define the rotation about axis \((O, \bz_0)\) and the rotation about axis \((O, \bz_1)\text{,}\) respectively. The length of axle \(OG\) is \(r\text{.}\)
Find the expression of kinematic screw \(\{\cV_{1/0}\}\) and of angular momentum \(\bH_O\text{.}\)
Denote by \({\bf R}_{O}=N_O \bz_0 + F_{Ou}\bu + F_{Ov}\bv\) and \({\bf R}_{I}=
N_I \bz_0 + F_{Iu}\bu + F_{Iv}\bv\) the reaction forces of the support on body 1 at point \(O\) and point \(I\text{,}\) respectively. Apply the FTD to show that \(\dte\) is constant and to find the components \(N_O\text{,}\)\(N_I\text{,}\)\(F_{Ou}\text{,}\)\(F_{Ov}\text{,}\)\(F_{Iu}\) and \(F_{Iv}\) of the reaction forces.
What is the value \(\dot{\theta}_{1}\) which \(\dot{\theta}\) must not exceed if the slip of body 1 is to be avoided? (call \(\mu\) the coefficient of static friction).
Using the expressions of \(N_{O}\) and \(N_{I}\text{,}\) find the value \(\dot{\theta}_{2}\) which \(\dot{\theta}\) must not exceed if the tipping of body 1 about \(I\) is to be avoided.
Solution.
a. First introduce angle \(\te = (\bx_0 , \bu) = ( \by_0 , \bv )\) which defines the orientation of plane \((O, \bu , \bz_0 )\) containing points \(O\text{,}\)\(I\) and \(G\text{.}\) Then introduce two unit vectors \(\bz_1\) and \(\bw\) in plane \((O, \bu , \bz_0 )\) such that
\begin{equation*}
\br_{OG}= r \bz_1, \qquad \br_{IG} = r \bw
\end{equation*}
Unit vector \(\bz_1\) is attached to disk 1. The angle \(\beta = (\bu, \bz_1)\) is the constant \(\pi /4\text{.}\) A rotation of angle \(\phi\) about axis \((O, \bz_1)\) would define a basis \(b_1 (\bx_1, \by_1 , \bz_1)\) attached to body 1. Note however that basis \(b_1\) is not used in what follows due to the axisymmetry of the system w.r.t. \((O, \bz_1)\text{.}\) We also note in view of \(\br_{OG}= r \bz_1\) that point \(O\) can be considered as rigidly attached to body 1 (the rigid extension of the disk). Hence we obtain
Note that body 1 admits as instantaneous axis of rotation the line \(OI\) since \(\vel_{O\in 1/0} = \vel _{I\in 1/0}=\bze\text{.}\) This shows that \(\bom_{1/0}\) is indeed directed along unit vector \(\bu\text{.}\)
Figure11.2.24.
With the following expression of the inertia matrix about point \(G\)
One could also have used \(\bH_O = \cI_O (\bom_{1/0})\) since point \(O\) is a fixed point of the body (\(\cI_O\) is found from \(\cI_C\) by applying the Parallel Axis theorem).
b. The total external action screw \(\{\cA_{ \bar{1}\to 1} \}\) exerted on body 1 is given by the sum
where (i) we are accounting for the contact forces at both points \(O\) and \(I\text{,}\) (ii) rolling and spinning friction is neglected, (iii) the contact resultant forces have been decomposed into the sum of normal and tangential components.
There is no possible way of eliminating both unknown contact forces \(\bR_O\) and \(\bR_I\) by applying a dynamic moment equation \(\bD_Q
=\bM _{Q, \bar{1}\to 1}\) about a particular point \(Q\text{.}\) So we choose point \(Q\) to be \(O\) since it leads to the simplest evaluation of the dynamic moment: we find
angular velocity \(\dte = \)constant from equation (3): the rotation of 1 about axis \((O, \bz_0 )\) evolves at constant rate.
\(F_{Iv} = 0\) from equation (4) using \(\ddte =0\text{.}\)
We then write the resultant equation \(m \ba_G = \bR_O + \bR_I -mg\bz_0\) on \((\bu, \bv, \bz_0)\text{,}\) using \(\ba_G =\tfrac{1}{\sqrt{2}} r \dte
d\bv/dt = - \tfrac{1}{\sqrt{2}} r \dte^2 \bu\text{.}\) We find
\begin{equation*}
- \tfrac{1}{\sqrt{2}} m r \dte^2 = F_{Ou}+ F_{Iu}
\end{equation*}
which shows that \(F_{Ov}= 0\text{.}\) However we arrive at an indetermination: only the sum \(F_{Ou} + F_{Iu}\) can be determined, and not the individual values of the friction forces of \(I\) and \(O\). Indeed we have six equations from the application of the FTD for seven unknowns: \(\te\text{,}\)\(\bR_O\text{,}\)\(\bR_I\text{.}\)
c. The no-slip motion of 1 relative to support \(\Pi\) occurs as long as
This would appear to be only a necessary condition.
Assume that the value taken for \(\dte\) leads to impending slip (at both \(O\) and \(I\)): then \(|\bF_O| = \mu N_O\) and \(| \bF_I| = \mu N_I\text{.}\) However both \(F_{Ou}\) and \(F_{Iu}\) must be of the same sign: this follows from the fact that the \(\vel_{O\in 1/0}\cdot \bu =\vel_{I\in 1/0}\cdot\bu\text{.}\) So at impending slip we can write \(|F_{Ou} + F_{Ov} | = |F_{Ou}| +
|F_{Ov} | = \mu (N_O + N_I )\text{:}\) this leads to \(\dte = \dte_1\text{.}\)
d. We need to find the normal reaction at point \(O\text{:}\)
Note that this result presupposes that the system does not slip. So it is valid as long as \(\dte_2 ^2 \lt \dte_1 ^2\text{,}\) i.e. \(\mu \gt \tfrac{4}{7}\text{.}\) If \(\mu \lt \tfrac{4}{7}\text{,}\) then sliding occurs before tipping about point \(I\text{.}\)
It was mentioned in Subsection 10.3.2 that Coulomb laws can lead to ill-posed problems: non-physical situations may arise whereby either no solution or multiple solutions are found from the Fundamental Theorem of Dynamics and the application of these friction laws. This is illustrated in the following example. See also Exercise 11.8.2.
Example11.2.25.
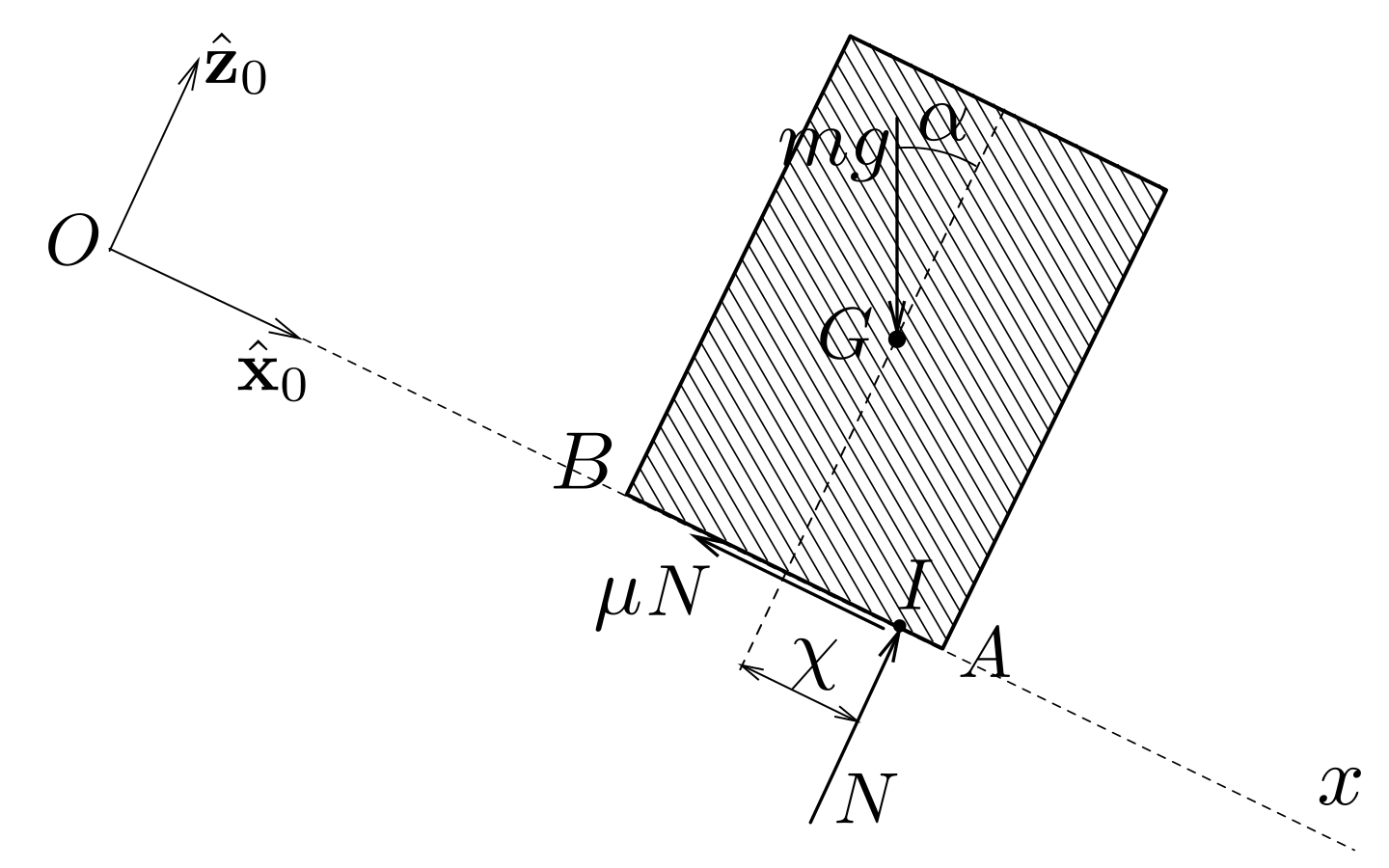
A right-circular cylinder 1 of uniformly distributed mass \(m\) and mass center \(G\) is set on a rough inclined plane 0 on one of its bases. The contact is characterized by coefficient of kinetic friction \(\mu\text{.}\) The cylinder is given an initial translational motion so that it begins to slip downward along a line \(Ox\) of steepest incline: the velocity of its mass center \(\vel_G\) is initially \(\vel_0\) while its angular velocity \(\bom\) is zero. The geometry of cylinder 1 is defined by its radius \(r\) and its height \(2h\text{.}\) Its moment of inertia about an axis passing through \(G\) and perpendicular to its axis \(Gz\) is \(J= mk^2\text{.}\)
Figure11.2.26.
Study the motion of the cylinder as a function of friction coefficient \(\mu\text{.}\) In particular show that if the condition \(\mu \gt \frac{k^2}{rh} + \frac{r}{h}\) is satisfied, no motion compatible with Coulomb friction is possible.
Solution.
We first define basis \((\bx_0,\by_0, \bz_0)\) attached to referential 0 with \((\bx_0, \bz_0)\) in the plane of motion containing mass center \(G\text{.}\) If we assume that the subsequent motion of body 1 is a translation along axis \((O,\bx_0)\text{,}\) then application of the FTD shows that the following equations must be satisfied
\begin{align*}
m \dv_G \amp = mg \sin\al -\mu N \amp \qquad (1)\\
0 \amp = N - mg \cos\al \amp \qquad (2) \\
mk^2 \dom \amp = - \chi N + \mu h N =0 \amp \qquad (3)
\end{align*}
in accordance with Coulomb laws. The location of point \(I\) is defined by distance \(\chi\) measured from \(I\) to axis \(Gz\text{.}\) See Figure 11.2.27. Equation (3) gives \(\chi = \mu h\text{.}\) Since point \(I\) must be located between the points \(A\) and \(B\) of the contact surface, we must impose \(\chi \lt r\text{,}\) leading to the condition \(\mu \lt \frac{r}{h}\text{.}\) When \(\mu \to \frac{r}{h}\text{,}\) the cylinder is about to tip about point \(A\text{.}\)
Figure11.2.27.
For \(\mu \gt \frac{r}{h}\text{,}\) the cylinder must tip about point \(A\) and we must modify equations (1-3) since immediately after release the cylinder possesses a non-zero angular acceleration \(\dom\) (with \(\om = 0\) and \(\chi =r\)). Application of the FTD now gives
\begin{align*}
m (a_A + h \dom) \amp = mg \sin\al -\mu N \amp \qquad (4)\\
m r \dom \amp = N - mg \cos\al \amp \qquad (5) \\
mk^2 \dom \amp = - r N + \mu h N \amp \qquad (6)
\end{align*}
where we have used \(\ba_G = \ba_A + \dom \by_0 \times\br_{AG} = (a_A + h \dom)\bx_0 + r\dom \bz_0\text{.}\) We can solve equations (5-6) to find the normal reaction
Since the contact is unilateral, we must impose \(N \gt 0\text{:}\) this leads to the condition \(\mu \lt \frac{k^2}{rh}+ \frac{r}{h}\text{.}\) Hence the cylinder slips and tips about \(A\) if the condition \(\frac{r}{h} \lt \mu \lt \frac{k^2}{rh}+ \frac{r}{h}\) is satisfied.
Finally for \(\mu \gt \frac{k^2}{rh}+ \frac{r}{h}\text{,}\) no solution compatible with the equations of motion and the friction laws can be found!