a. We expect \(I_{Oyz}=0\) by symmetry. We can find the moment/products \(I_{Ozz}\text{,}\) \(I_{Ozz}\) and \(I_{Oxz}\) from those about axes \(OXYZ\text{.}\) For instance
\begin{align*}
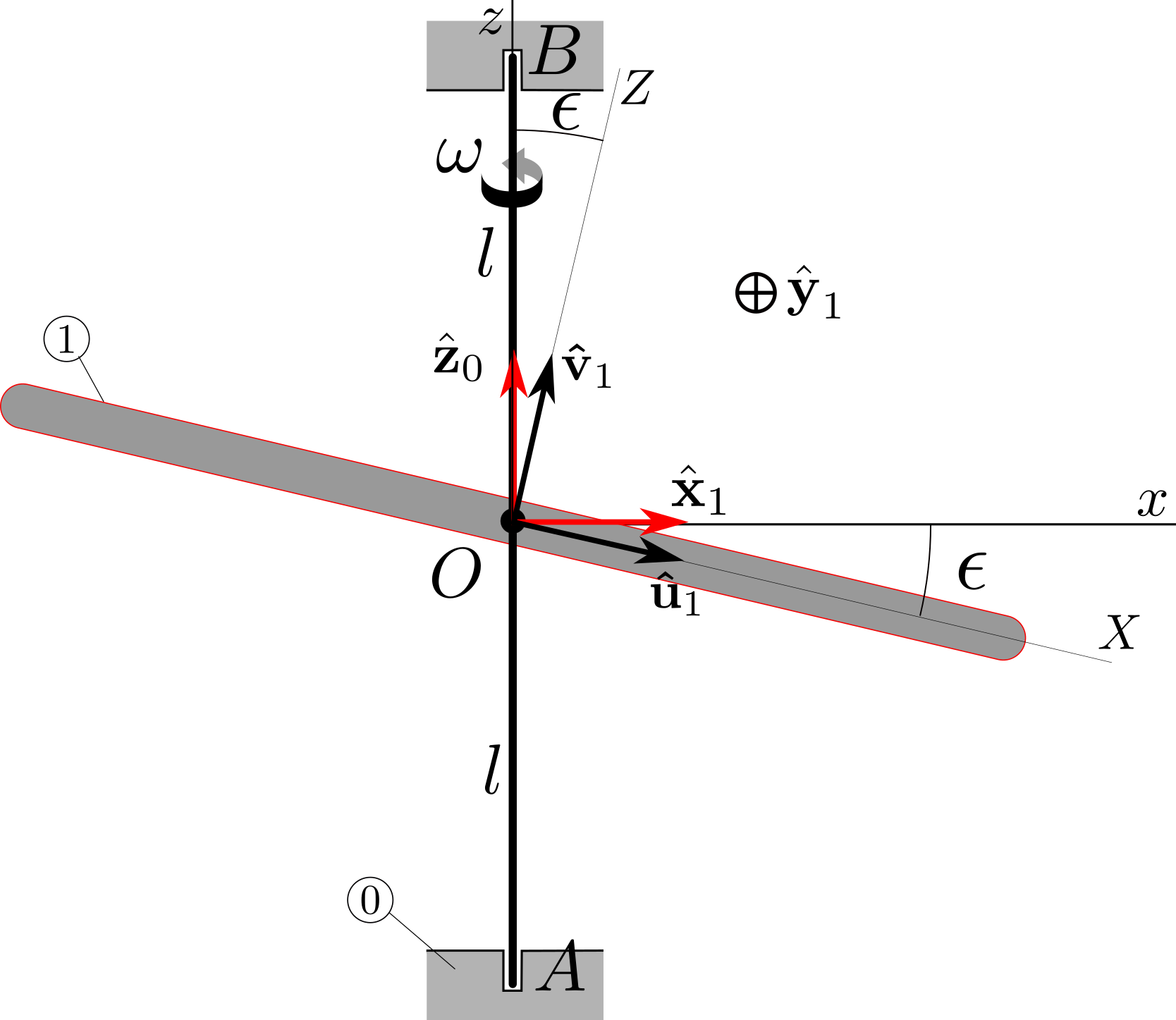
I_{Ozz} \amp = \int (x^2 +y^2) dm = \int \Big( (X \cos\ep + Z \sin\ep)^2 + Y^2 \Big) dm\\
\amp = \int (X^2 \cos^2 \ep + Y^2) dm\\
\amp = \frac{1}{4}mr^2 (1+ \cos^2\ep)
\end{align*}
where we used \(\int X^2 dm = \int Y^2 dm = \frac{1}{4}mr^2\text{.}\) Likewise we find
\begin{align*}
I_{Oxz} \amp = - \int xz dm = -\int(X \cos\ep + Z \sin\ep)(-X \sin\ep + Z \cos\ep) dm\\
\amp = \int X^2 \cos\ep\sin\ep dm\\
\amp = \frac{1}{4}mr^2 \cos\ep \sin\ep
\end{align*}
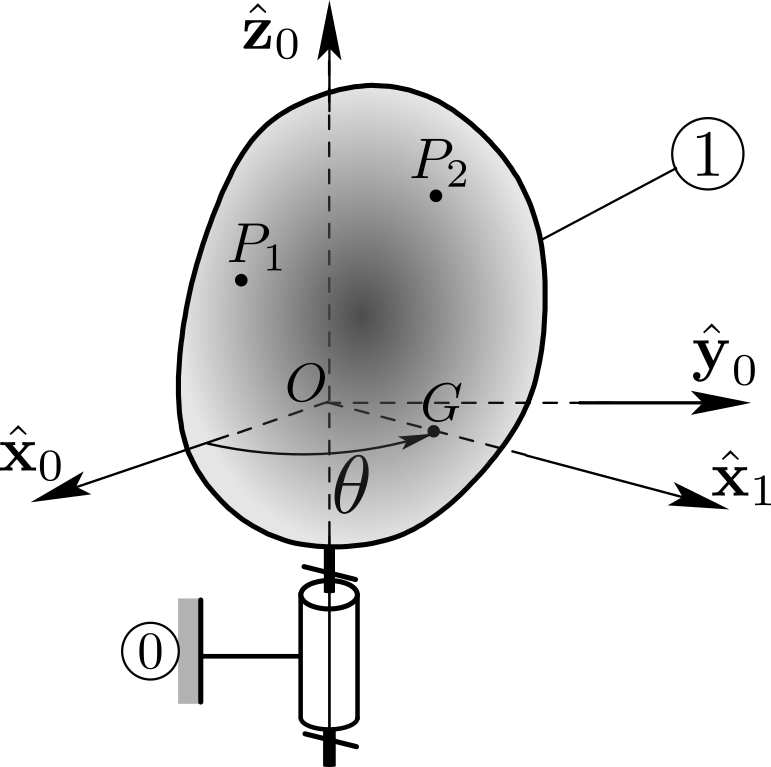
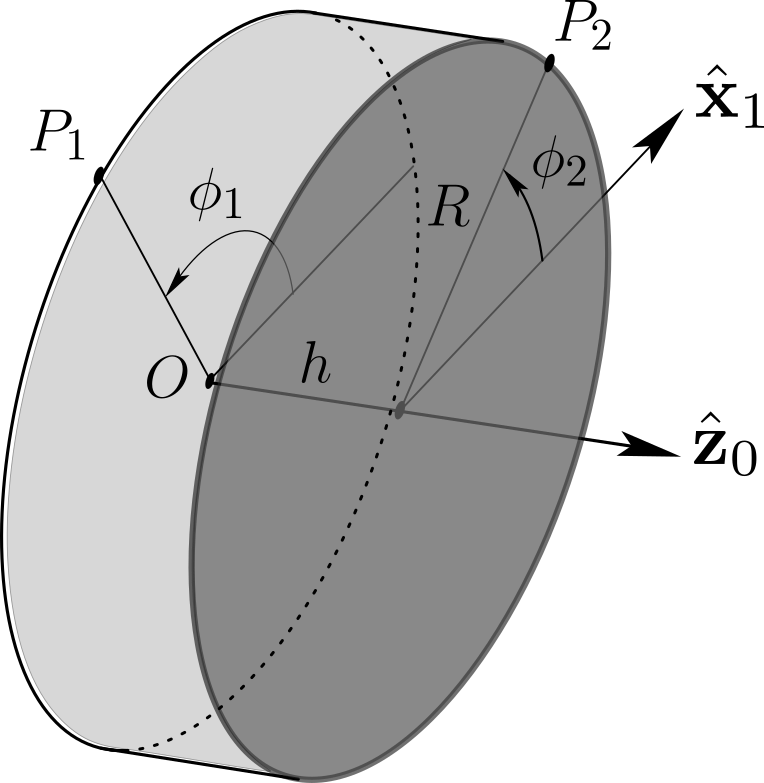
b. We use two points in plane \(Oxz\) of coordinates \(P_1 (l_1\cos\ep, 0,-l_1\cos\ep)\) and \(P_2 (-l_2\cos\ep, 0, l_2\cos\ep)\text{.}\) Static and dynamic balancing is imposed by the equations
\begin{gather*}
m_1 l_1 \cos\ep = m_2 l_2 \cos\ep\\
m_1 l_1 \sin\ep = m_2 l_2 \sin\ep\\
\frac{1}{4}mr^2 \cos\ep \sin\ep = - (m_1 l_1^2 +m_2 l_2^2) \cos\ep \sin\ep
\end{gather*}
A solution is supplied by imposing \(m_1 = m_2 =-\delta^2 m/8\) and \(l_1 = l_2 =r/\delta\) for \(1\lt \delta \lt 2\text{.}\) This solution is not practical, as substantial amounts of material need to be removed from the flywheel (\(m_1+m_2\) ranges from \(- m/4 \) to \(-m\text{!}\)).