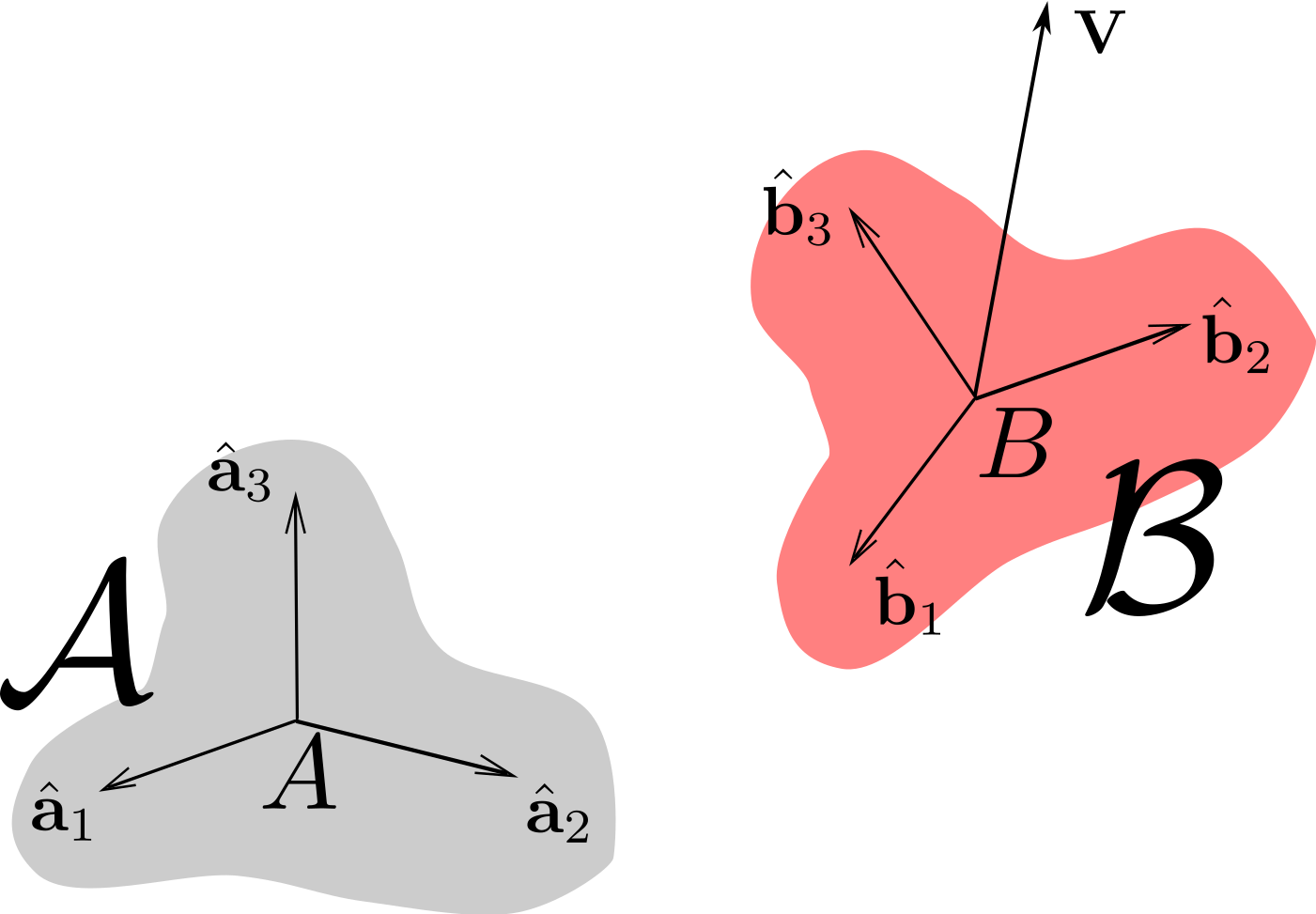
A rigid body \(\cB\) is in motion relative to a referential \(\cA\text{,}\) as shown in Figure 3.1.1. Consider an arbitrary vector \(\bvv\) attached to \(\cB\text{.}\) The components \((v_1, v_2, v_3)\) of \(\bvv\) on basis \(b_B =(\bhb_1,\bhb_2,\bhb_3)\) of \(\cB\) are constant. However, its components \((V_1, V_2, V_3)\) on basis \(b_A =(\bha_1,\bha_2,\bha_3)\) of \(\cA\) are necessarily (scalar) functions of time due to the motion of \(\cB\) relative to \(\cA\text{.}\)
Figure3.1.1.Rigid body \(\cB\) in motion relative to \(\cA\)
We seek an expression for the derivative \((d\bvv /dt)_\cA\) relative to \(\cA\) by a method more tractable than that which consists of differentiating \(\bvv= {V}_1 \bha_1 + {V}_2 \bha_2 + {V}_3 \bha_3\) resolved on basis \((\bha_1,\bha_2,\bha_3)\) of \(\cA\text{.}\) To this end, we introduce the following operator
since the scalar product \(\buu \cdot \bvv\) is constant for any two vectors \(\buu\) and \(\bvv\) fixed in \(\cB\text{.}\)
The matrix representation of this operator on basis \((\bhb_1 , \bhb_2 , \bhb_3)\) (or on any other basis attached to \(\cB\)) must then be skew-symmetric 1 given that
for any vector \(\bvv\) fixed in \(\cB\text{.}\) Vector \(\bom_{\cB/ \cA}\) is independent of \(\bvv\) and of the choice of basis of \(\cB\text{.}\)
Proof.
Uniqueness is easily shown: consider two vectors \(\bom_1\) and \(\bom_2\) satisfying (3.1.2), then \((\bom_1 -\bom_2) \times \bvv = \bze\) for all vectors \(\bvv\) fixed in \(\cB\text{.}\) This necessarily implies \(\bom_1= \bom_2\text{.}\) Furthermore, formula (3.1.2) is independent of the choice of basis of \(\cB\text{.}\)
Remark3.1.3.
It can be shown that all skew-symmetric operators \(\cU\) of 3-dimensional oriented vector spaces must be of the type \(\cU (\bvv) = \bU \times \bvv\text{.}\)
Remark3.1.4.
Vector \(\bom _{\cB/ \cA}\) is not expected to be a constant vector in \(\cB\) nor in \(\cA\text{.}\)
We can generalize formula (3.1.2) for arbitrary vector functions \(\bvv \text{,}\) that is, varying relative to both \(\cA\) and \(\cB\text{.}\)
This fundamental formula shows that the time-derivative of \(\bvv\) relative to \(\cA\) can be found from that relative to \(\cB\) by evaluating the term \(\bom _{\cB/ \cA} \times \bvv\) which accounts for the change of orientation of \(\cB\) relative to \(\cA\text{.}\) The consequence of this formula is that it offers a practical way to determine the time-derivatives of vectors. If angular velocities can be determined for arbitrary motions, we have an efficient means of calculating \((d\bvv/dt)_\cA\) by simple cross-product evaluations of vectors, without having to resolve vector \(\bvv\) into components on the chosen basis of referential \(\cA\text{.}\)
Note that the components of angular velocity \(\bom_{\cB/ \cA}\) on basis \((\bhb_{1},\bhb_{2},\bhb_{3})\) of \(\cB\) can be expressed as, according to matrix representation of operator \((d\cdot /dt)_\cA\) on the same basis,
Unfortunately these expressions do not offer a practical way of calculating \(\bom_{\cB/ \cA}\) since the time derivatives \((d \bhb_{i} / dt )_{\cA}\) (\(i=1,2,3\)) are not easily found. They could be evaluated by expressing each basis vector \(\bhb_i\) on a basis of \(\cA\text{.}\) this is not only unpractical, but we would lose all benefits of formula (3.1.2). In fact, the simplest representation of \(\bom_{\cB/ \cA}\) is most often resolved on neither a basis of \(\cA\) nor a basis of \(\cB\).