Rigid bodies in planar motion play an important role in countless technological applications. Their kinematics can be analyzed in a straightforward manner.
Definition7.4.1.Planar Motion.
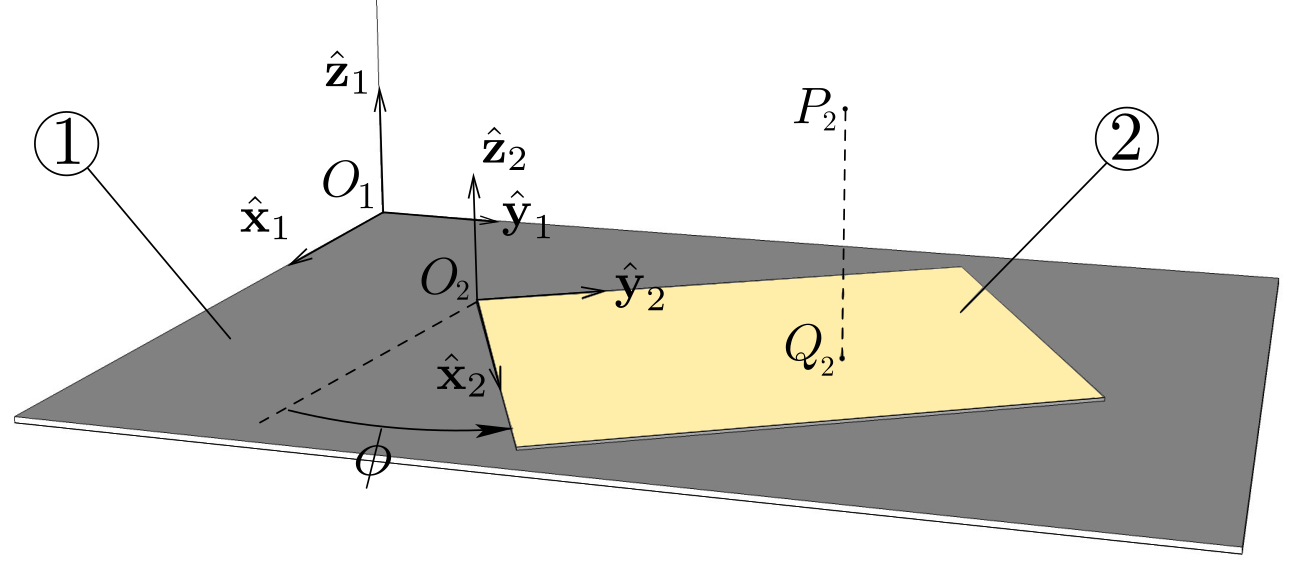
Rigid body \(\cB_2\) is in planar motion relative to rigid body \(\cB_1\) if a plane \((O_2 , \bx_2 , \by_2)\) of \(\cB_2\) coincides geometrically with a plane \((O_1 , \bx_1 , \by_1)\) of \(\cB_1\) at all times.
Figure7.4.2.Planar motion
Hence, all points attached to \(\cB_2\) move in planes parallel to plane \((O_1 , \bx_1 , \by_1)\text{.}\) The orientation of the normal direction to plane \((O_2 , \bx_2 , \by_2)\) remains constant, and we can choose \(\bz_2 = \bz_1\text{.}\) See Figure 7.4.2. At any instant, the position of \(\cB_2\) relative to \(\cB_1\) is defined by
the Cartesian coordinates \((x (t), y(t) )\) of point \(O_2\) on axes \((O_1, \bx_1)\) and \((O_1, \by_1)\text{:}\)
\begin{equation*}
\br_{O_1 O_2} = x (t) \bx_1 + y (t) \by_1
\end{equation*}
the angle \(\phi (t) = (\bx_1 , \bx_2) = (\by_1 , \by_2)\) defining the orientation of \(\cB_2\) relative to \(\cB_1\text{.}\)
Hence, in general, a rigid body \(\cB_2\) in planar motion relative to \(\cB_1\) has three degrees of freedom: the functions \(x (t)\text{,}\)\(y(t)\) and \(\phi(t)\) are in general independent, and completely specify the motion of \(\cB_2\text{.}\) Note that we can view \(x \equiv x(\phi)\) and \(y \equiv y(\phi)\) as functions of \(\phi\) instead of \(t\text{,}\) with \(\phi \equiv \phi (t)\text{.}\) The kinematic screw of \(\cB_2\) relative to \(\cB_1\) can then be written in terms of coordinates \((x , y , \phi)\text{:}\)
since position vector \(\br_{Q P}\) is collinear to \(\bz_1\text{.}\) This implies that the trajectory of point \(P\) can be obtained from that of \(Q\) by a translation along \(\bz_1\text{.}\) Similarly, the acceleration of \(P\) is equal to that of \(Q\)
This shows that the analysis of the kinematics of \(\cB_2\) can be reduced to that of plane \((O_2 , \bx_2 , \by_2)\text{.}\)
Subsection7.4.1Instantaneous center of rotation
Theorem7.4.3.Instantaneous Center of Rotation.
At any instant, there exists a unique point \(I_{12}\) of \(\cB_2\) of plane \((O_2 , \bx_2 , \by_2)\text{,}\) called instantaneous center of rotation> of \(\cB_2\) relative to \(\cB_1\) whose instantaneous velocity relative to \(\cB_1\) is zero:
as long as \(\dphi \neq 0\text{,}\) and where \(\lambda\) is an arbitrary scalar. This set of points is the instantaneous axis of rotation \(\Delta_{12}\) of \(\cB_2\) relative to \(\cB_1\text{.}\) Point \(I_{12}\) in plane \((O_2 , \bx_2 , \by_2)\) is obtained by setting \(\lambda = 0\) in (7.4.3).
Hence, body \(\cB_2\) appears to be in an instantaneous rotational motion about axis \(\Delta_{12} (I_{12} ,\bz_1)\) as far as its velocity field is concerned}: for any point \(Q\) in plane \((O_2 , \bx_2 , \by_2)\)
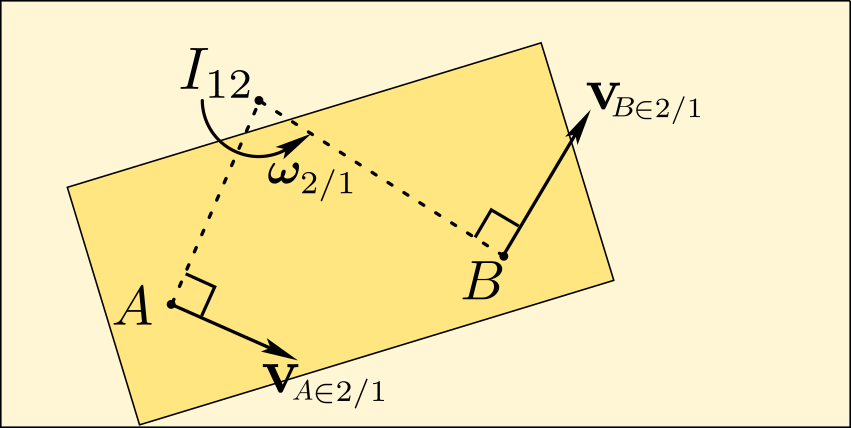
This shows that the line \(I_{12}Q\) is perpendicular to velocity \(\vel_{Q \in 2/1}\text{.}\) This property provides a method for the construction of \(I_{12}\text{.}\) If the velocity of two points \(A\) and \(B\) of body \(\cB_2\) are known in direction at a particular instant, then point \(I_{12}\) is located at the intersection of the two normals based at \(A\) and \(B\) to velocities \(\vel_{A \in 2 /1}\) and \(\vel_{B \in 2 /1}\text{,}\) respectively. See Figure 7.4.4.
Figure7.4.4.Construction of the instantaneous center.
Remark7.4.5.
The acceleration field of \(\cB_2\) is not that of a body in rotation about \(I_{12}\text{..}\) In fact, the acceleration of \(I_{12} \in 2\) is not zero.
Proof.
To find the expression of \(\ba_{I_{12}\in 2/1}\text{,}\) let us denote \(\br_{O_1 O_2} = \br (\phi)\) and note that the position of \(I_{12}\) according to (7.4.3)} can be rewritten in the form
where the derivative \(d\br /d\phi\) is performed relative to \(\cB_1\text{.}\) Then, the acceleration \(\ba_{I_{12}\in 2/1}\) is found according to formula relating the accelerations of two points of \(\cB_2\)
which shows that \(\ba_{I_{12}\in 2/1}\) is not zero even if \(\ddphi = 0\) In fact, it is not a function of \(\ddphi\text{.}\)
Subsection7.4.2The fixed and moving centrodes
Definition7.4.6.Centrodes.
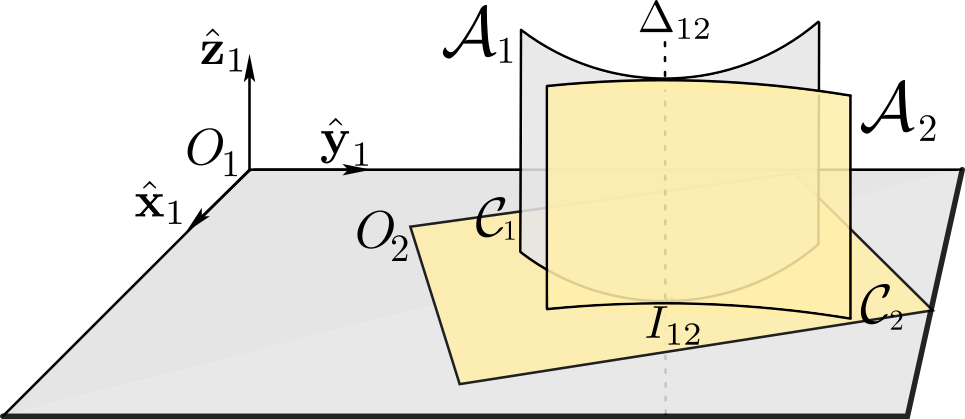
During the planar motion of body \(\cB_2\) relative to \(\cB_1\text{,}\) the instantaneous center of rotation \(I_{12}\) describes a curve \(\cC_{1}\) in \(\cB_1\) and a curve \(\cC_2\) in \(\cB_2\text{,}\) known as the fixed and moving centrodes of the motion of \(\cB_2\) relative to \(\cB_1\text{.}\)
Figure7.4.7.The fixed and moving centrodes.
The centrodes \(\cC_1\) and \(\cC_2\) are clearly obtained as the cross-sections of the axodes \(\cA_1\) and \(\cA_2\text{,}\) respectively, with plane \((O_1, \bx_1 , \by_1)\text{.}\) See Figure 7.4.7 We can imagine a point, still denoted \(I_{12}\text{,}\) whose trajectory relative to \(\cB_1\) is the fixed centrode \(\cC_1\text{.}\) From an observer attached to \(\cB_2\text{,}\) the same point moves along the moving centrode \(\cC_2\text{.}\) Condition (7.4.2) is equivalent to
Furthermore, the velocity field of plane \((O_2 , \bx_2 , \by_2)\) relative to plane \((O_1 , \bx_1 , \by_1)\) is equivalent to that of centrode \(\cC_2\) rolling without slipping on centrode \(\cC_1\text{.}\)
The Cartesian equations of \(\cC_1\) on \((\bx_1 , \by_1)\) can be easily be found from equation (7.4.5). Denoting the Cartesian coordinates of \(I_{12}\) as \((X_I , Y_I)\) on \((O_1 , \bx_1 ,\by_1)\text{,}\) we find
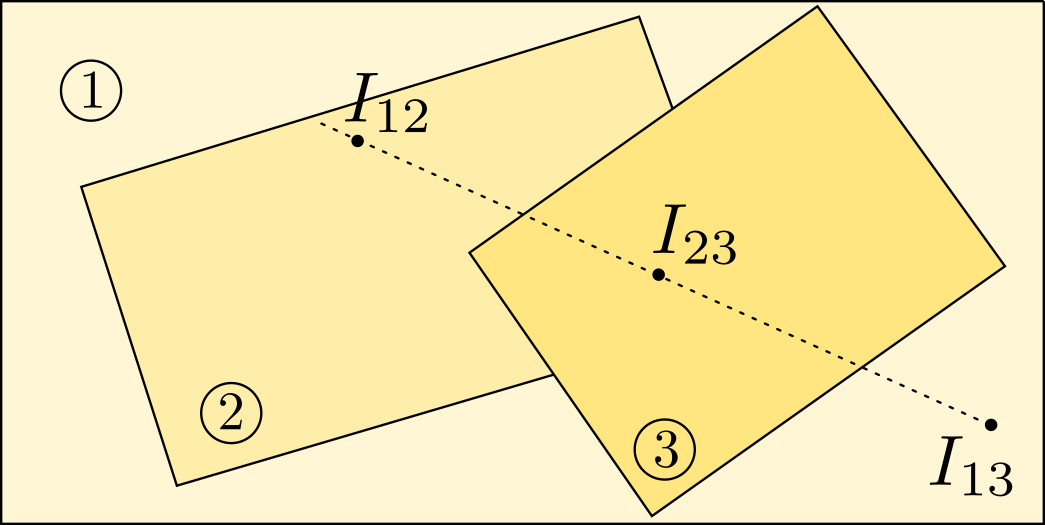
Consider three rigid bodies \(\cB_1\text{,}\)\(\cB_2\) and \(\cB_3\) in relative planar motion. Suppose that at a given time the positions of instantaneous centers of rotation \(I_{12}\) and \(I_{23}\) are known. See Figure 7.4.9. Recall from Section 6.5 that kinematic screw \(\{\cV_{3 /1}\}\) can be determined as the sum of screws \(\{\cV_{2 /1}\}\) and \(\{\cV_{3 /2}\}\) according to the kinematic loop formula (6.5.4). We may then ask whether the position of instantaneous center \(I_{13}\) can be found from those of \(I_{12}\) and \(I_{23}\text{.}\)
The equality \(\{\cV_{3 /1}\}= \{\cV_{2 /1}\} + \{\cV_{3 /2}\}\) is equivalent to the equations
denoting by \(\bz = \bz_1 = \bz_2 = \bz_3\) the common normal to the three planes. This shows that \(\br_{I_{23} I_{13}}\) and \(\br_{I_{12} I_{13}}\) are collinear.
Theorem7.4.8.Kennedy’s Theorem.
If three rigid bodies are in relative planar motions, the three instantaneous centers \(I_{12}\text{,}\)\(I_{23}\) and \(I_{13}\) are collinear points. Furthermore, the position of \(I_{13}\) must satisfy
Figure7.4.9.Kennedy’s theorem: the 3 instantaneous centers \(I_{12}\text{,}\)\(I_{23}\) and \(I_{13}\) are collinear points.
Example7.4.10.
A body \(\cB_2\) is in planar motion relative to \(\cB_1(O_1 , \bx_1, \by_1)\) in such a way that point \(O_2\) of \(\cB_2\) slides along axis \((O_1 , \bx_1)\) of \(\cB_1\) while point \(A_2\) of \(\cB_2\) slides along axis \((O_1 , \by_1)\) of \(\cB_1\text{.}\) Let \(\bx_2\) be the unit vector such that \(\br_{O_2 A_2} = \ell \bx_2\) (\(\ell\) is a constant), and let \(\phi (t)\) be the angle which line \(O_2 A_2\) makes with axis \((O_1 , \bx_1)\text{.}\) See Figure 7.4.11.
Determine the kinematic screw of \(\cB_2\) relative to \(\cB_1\text{.}\)
Find the position of the instantaneous center of rotation \(I_{12}\text{.}\) Then determine the corresponding fixed and moving centrodes. Sketch the moving centrodes at various instants. Find the velocity of \(I_{12}\) in motion along the fixed centrode, then along the moving centrode. Verify that these two velocities are equal.
Solution.
The kinematic screw of \(\cB_2\) relative to \(\cB_1\) is found by determining angular velocity \(\bom_{2/1}\) and the velocity of a point of \(\cB_2\text{.}\) With the notations of Figure 7.4.11, we find
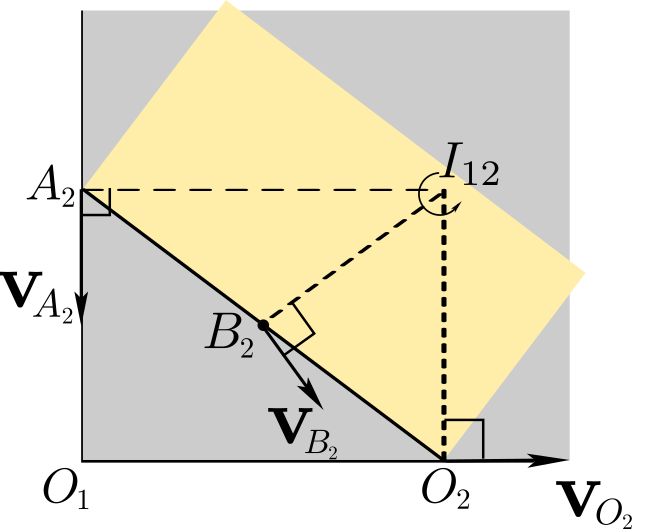
Given the direction of \(\vel_{O_2 \in 2 / 1}\) and \(\vel_{A_2 \in 2 / 1}\text{,}\) the instantaneous center of rotation \(I_{12}\) is located at the intersection of lines \((O_2 , \by_1)\) and line \((A_2 , \bx_1)\text{:}\) hence the figure \(O_1 A_1 I_{12} O_2\) forms a rectangle. See Figure 7.4.12.
Figure7.4.12. The Cartesian coordinates of \(I_{12}\) on \((O_1, \bx_1 , \by_1)\) are easily found to be
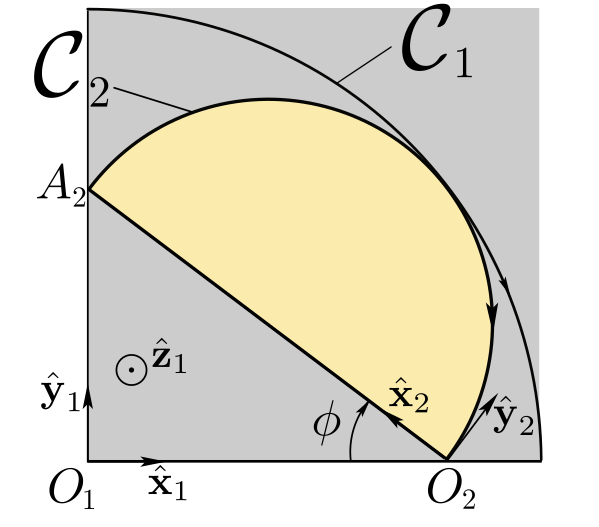
These coordinates define the fixed centrode \(\cC_1\) of the motion, whose equation is given by \(X_I^2 + Y_I^2 = \ell^2\) (by eliminating \(\phi\)): \(\cC_1\) is the circle of center \(O_1\) and radius \(\ell\text{.}\) The fixed centrode must be viewed as a subset of \(\cB_1\text{.}\) As \(\cB_2\) moves relative to \(\cB_1\text{,}\) the geometric point \(I_{12}\) travels along curve \(\cC_1\) with velocity \(d\br_{O_1 I_{12}} /dt\text{:}\)
The moving centrode \(\cC_2\) is found by determining the coordinates \((x_I, y_I)\) of \(I_{12}\) in the Cartesian coordinate system \((O_2, \bx_2, \by_2)\) attached to \(\cB_2\text{:}\)
Elimination of \(\phi\) gives the equation \((x_I - \ell/2)^2 + y_I^2 = \ell^2/4\text{:}\)\(\cC_2\) is the circle of center \(B_2\) (midpoint of line segment \(O_2A_2\)). and radius \(\ell/2\) (passing through points \(O_2\) and \(A_2\)). As \(\cB_2\) moves relative to \(\cB_1\text{,}\)\(\cC_2\) (attached to \(\cB_2\)) rolls without slipping on \(\cC_1\) (attached to \(\cB_1\)) in “contact” at \(I_{12}\text{.}\) One can easily verify that the two circles found are tangential at \(I_{12}\text{.}\)
Point \(I_{12}\) moves along centrode \(\cC_2\) with velocity \(\vel_{I_{12}/ 2}\) obtained by differentiating \(\br_{O_2I_{12}}\) relative to \(\cB_2\text{:}\)
The condition \(\vel_{I_{12}\in 2/1} = \bze\) is equivalent to \(\vel_{I_{12}/2} = \vel_{I_{12}/1}
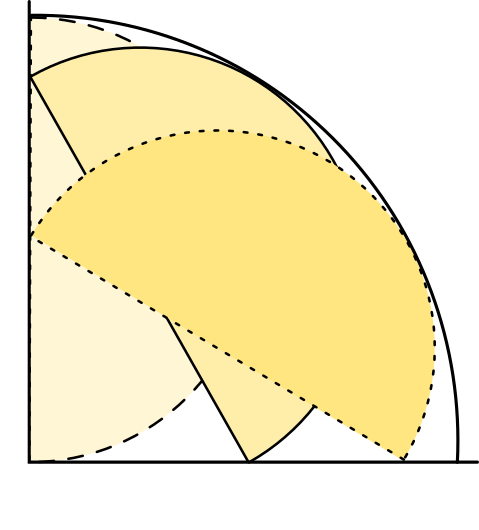
\text{.}\) This result can easily be verified by comparing equation (1) to equation (2). The two centrodes are shown in Figure 7.4.13. A few snapshots of the corresponding motion are shown in Figure 7.4.14.
Figure7.4.13.
Figure7.4.14.
Subsection7.4.4Instantaneous Center of Acceleration
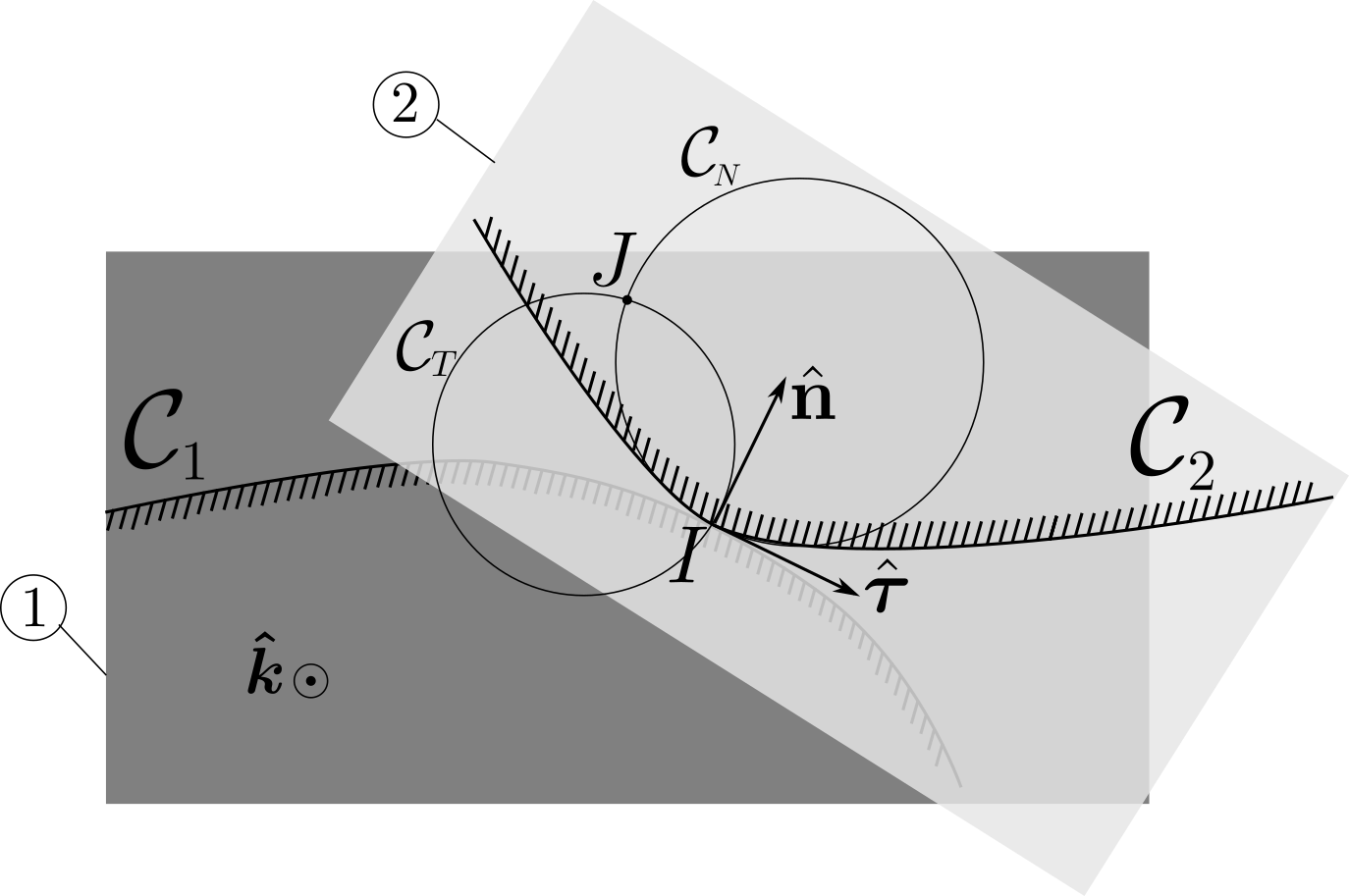
Recall that a body \(\cB_2\) in planar motion relative to rigid body \(\cB_1\) admits an instantaneous center of rotation \(I\equiv I_{12}\text{,}\) that is, such that \(\vel_{P\in 2/1} = \bom_{2/1}\times \br_{IP}\) for any point \(P\) and at any given time (as long as \(\bom_{2/1}\neq \bze\text{..}\) Also recall that point \(I\) describes two curves, the fixed centrode \(\cC_1\) relative to \(\cB_1\) and the moving centrode \(\cC_2\) relative to \(\cB_2\) and that \(\cC_2\) rolls without slipping on \(\cC_1\text{.}\) See Figure 7.4.15. Here we wish to show that the motion of \(\cB_2\) can also be characterized in terms of an instantaneous center of acceleration.
Figure7.4.15.Center of acceleration \(J\text{.}\)
First, we express the acceleration of any point \(P\) of \(\cB_2\) in the following way 1
In (7.4.7), \(\vel_{I/1}\) is the velocity of \(I\) along the fixed centrode \(\cC_1\text{.}\) Recall that \(\vel_{I/1}\) is necessarily tangent to \(\cC_1\) (and \(\cC_2\text{.}\) at contact point \(I\text{.}\) If we define the unit tangent vector \(\btau\) and unit normal vector \(\bn\) at \(I\text{,}\) 2 we can then write \(\vel_{I/1} = v_I \btau\text{.}\) With \(\bk = \btau \times \bn\text{,}\) we write the angular velocity \(\bom_{2/1} = \om_{2/1} \bk\) and the angular acceleration \(\bal_{2/1} = \al_{2/1}\bk\text{.}\) We can now express \(\ba_{P/1}\) in the form
where we have used \(\bom_{2/1}\times\vel_{P/1} = \bom_{2/1}\times(\bom_{2/1}\times\br_{IP}) = -\om_{2/1}^2 \br_{IP}\text{.}\)
First, we ask if points of \(\cB_2\) can be found with vanishing normal acceleration: since the tangent direction associated with the path of point \(P\) is normal to line \(IP\text{,}\) such points must satisfy \(\ba_{P/1} \cdot \br_{IP} =0\text{.}\) Using (7.4.8), we obtain
Let us define the position of \(P\) in terms of its coordinates relative to axes \((I,\btau)\) and \((I,\bn)\text{,}\) that is, we define \(\br_{IP}= x\btau + y \bn\text{:}\) then the set of points, denoted \(\cC_N\text{,}\) with vanishing normal acceleration is characterized by the equation
\begin{equation}
(x^2 +y^2) - \frac{v_I}{\om_{2/1}} y = 0 \tag{7.4.9}
\end{equation}
This is the circle centered at \((0 , \frac{v_I}{2\om_{2/1}})\) and of radius \(r_N=\frac{v_I}{2\om_{2/1}}\text{.}\)
Similarly, we can determine the set \(\cC_T\) of points of body \(\cB_2\) with vanishing tangential acceleration: now we set \(\ba_{P/2} \times \br_{IP} =\bze\text{.}\) Using (7.4.8) we obtain
The set \(\cC_T\) is the circle centered at \((-\frac{\om_{2/1} v_I}{2\al_{2/1}},0)\) and of radius \(r_T=\frac{\om_{2/1} v_I}{2\al_{2/1}}\text{.}\) If there exists a point \(J\) satisfying \(\vel_{J\in 2/1} =\bze\) it must necessarily lie at the intersection of circles \(\cC_N\) and \(\cC_T\text{:}\) its coordinates \((x_J, y_J)\) must satisfy (7.4.9) and (7.4.10) leading to \(y=- \frac{\om_{2/1}^2}{\al_{2/1}} x\) and the coordinates
Theorem7.4.16.Instantaneous center of acceleration.
At any instant, the motion of body \(\cB_2\) relative to body \(\cB_1\) can be characterized by an instantaneous center of acceleration \(J\) whose position relative to instantaneous center of rotation \(I\) is given by (7.4.11). Then, the acceleration of any point \(P\) of \(\cB_2\) is given by
Body \(\cB_2\) behaves as if in rotation about \(J\text{,}\) as far as its acceleration is concerned.
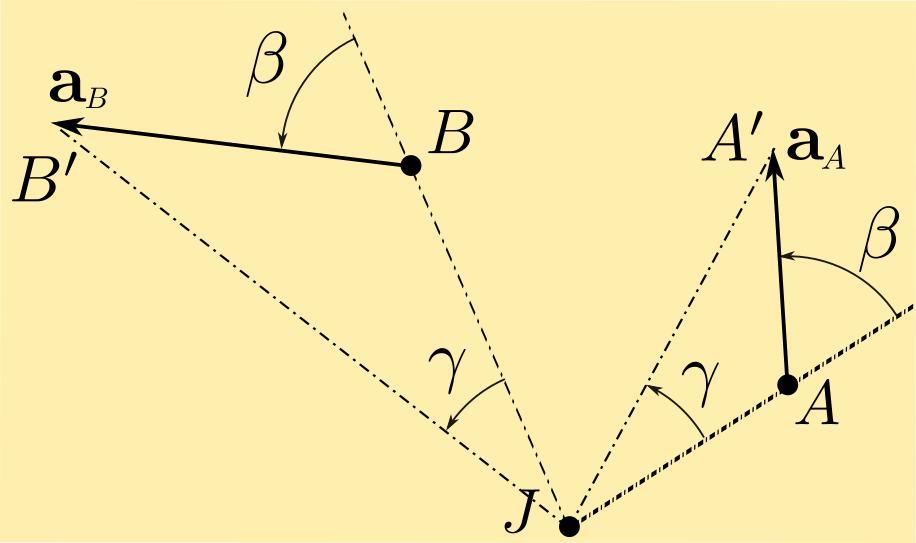
Once its location has been determined, the instantaneous center of acceleration \(J\) can lead to the graphical construction shown in Figure 7.4.15. If the acceleration of a point \(A\) is known, then the acceleration of any other point \(B\) can be found. The triangles \(JAA'\) and \(JBB'\) are directly similar, that all corresponding angles in triangles \(JAA'\) and \(JBB'\) are equal and described in the same rotational sense.
Figure7.4.17.Construction of \(\ba_B\) from \(\ba_A\text{.}\)