We can now return to the determination of angular momentum \(\bH_A\) which was started in Section 9.5. Recall that the inertia operator \(\iner\) of body \(\cB\) about point \(B\) is characterized by
for any vector \(\bvv\text{.}\) In addition, the velocity field of \(\cB\) relative to referential \(\cE\) is entirely described by the kinematic screw \(\{ \cV _{\cB / \cE} \}\text{.}\) We found in Section 9.5 that the angular momentum of \(\cB\) about point \(A\) is given by
We now can replace the remaining integral term by \(\iner (\bom_{\cB})\text{.}\) We have thus obtained the most general formula for the determination of the angular momentum of a rigid body.
Theorem9.6.1.Angular Momentum of a Rigid Body.
The angular momentum about point \(A\) of a rigid body \(\cB\) of mass \(m\text{,}\) mass center \(G\text{,}\) and inertia operator \(\iner\) about point \(B\) is given by
\begin{equation}
\bH_{A} = m \br_{AG} \times \vel_{B\in\cB}
+
m \br_{AB}\times (\bom_{\cB} \times \br_{BG} )
+
\iner (\bom_{\cB} )\tag{9.6.1}
\end{equation}
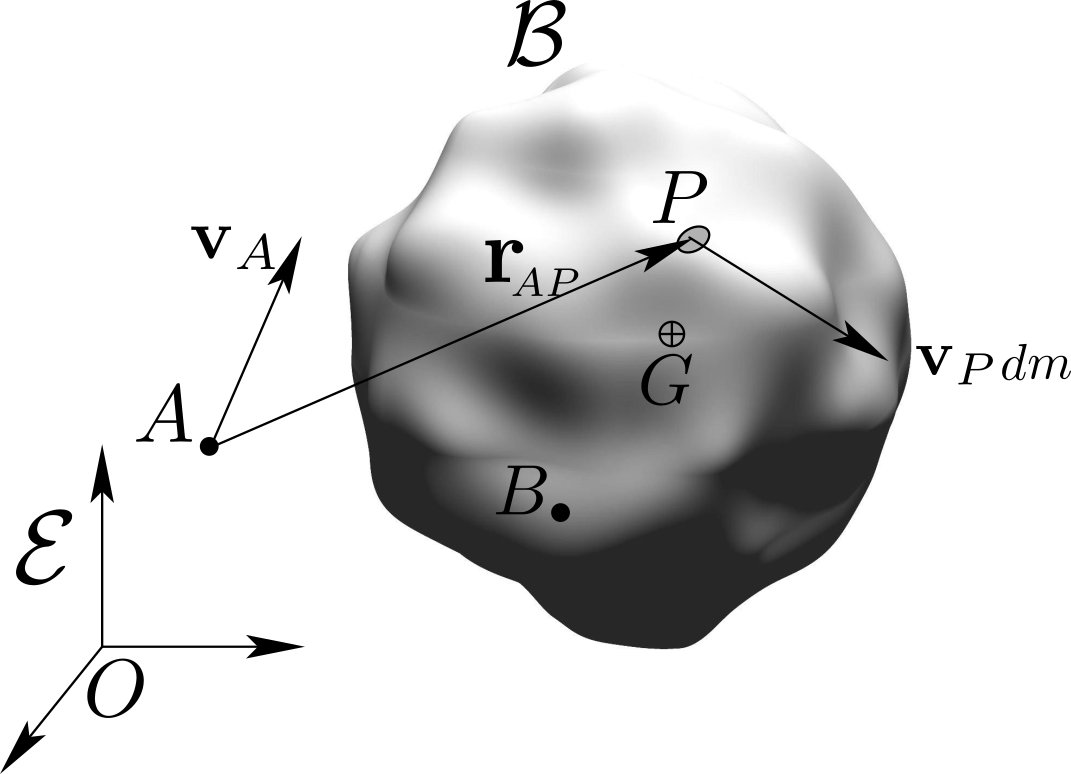
Figure9.6.2.
Remark9.6.3.
In formula (9.6.1), \(\vel_{B\in \cB}\) may be the velocity of a point attached to \(\cB\) only instantaneously.
Remark9.6.4.
The term \(\iner (\bom_{\cB})\) in (9.6.1) is determined in practice by choosing a basis preferably (but not necessarily) attached to \(\cB\) leading to a matrix representation of operator \(\iner\text{.}\)
Simplifications can be obtained in formula (9.6.1) in special cases:
Case 1:\(B \equiv G\text{.}\) Then the second term in (9.6.1) drops out, and we obtain
\begin{equation}
\bH_{A} = \br_{AG} \times m \vel_{G}+\inerG (\bom_\cB)\tag{9.6.2}
\end{equation}
If we let \(A\equiv G\) in this formula, we obtain
This result shows that in general \(\bH_{B} \neq \iner(\bom_{\cB})\) unless
point \(B\) is the mass center \(G\text{,}\)
body \(\cB\) is in rotational motion about point \(B\) fixed in both \(\cE\) and \(\cB\text{,}\)
point \(B\) is an instantaneous center of rotation (in which case body \(\cB\) admits an instantaneous axis of rotation).
\(\danger\) Finally, recall that the dynamic moment about mass center \(G\) is related to angular momentum about \(G\) by the equation \(\bD_G = d\bH_G /dt\text{.}\) It is tempting to then write \(\bD_G = {d \over dt} (\inerG \bom) = \inerG \bal\text{.}\) But this last equality is incorrect.