Section2.4Kinematics in Normal/Tangential Components
The trajectory \(\cC\) of a particle \(P\) observed in a referential \(\cE\) is completely specified once a parametrization of the position vector \(\br_{OP} (u)\) has been found where parameter \(u\) is a known function of time. For instance, the trajectory of \(P\) can be defined by a parametric representation \((x(u), y(u), z(u))\) in Cartesian coordinates, or \((r(u), \te(u), z(u))\) in cylindrical coordinates. As a possible choice for parameter \(u\text{,}\) we may use the length \(s\) of the arc of trajectory \(P_0 P\) from an arbitrary origin \(P_0\) of \(\cC\) which we orient in the sense of the motion}. Coordinate \(s\) is intrinsic to the curve \(\cC\text{,}\) that is, it does not depend on coordinate axes defined in \(\cE\text{,}\) or even the chosen referential itself.
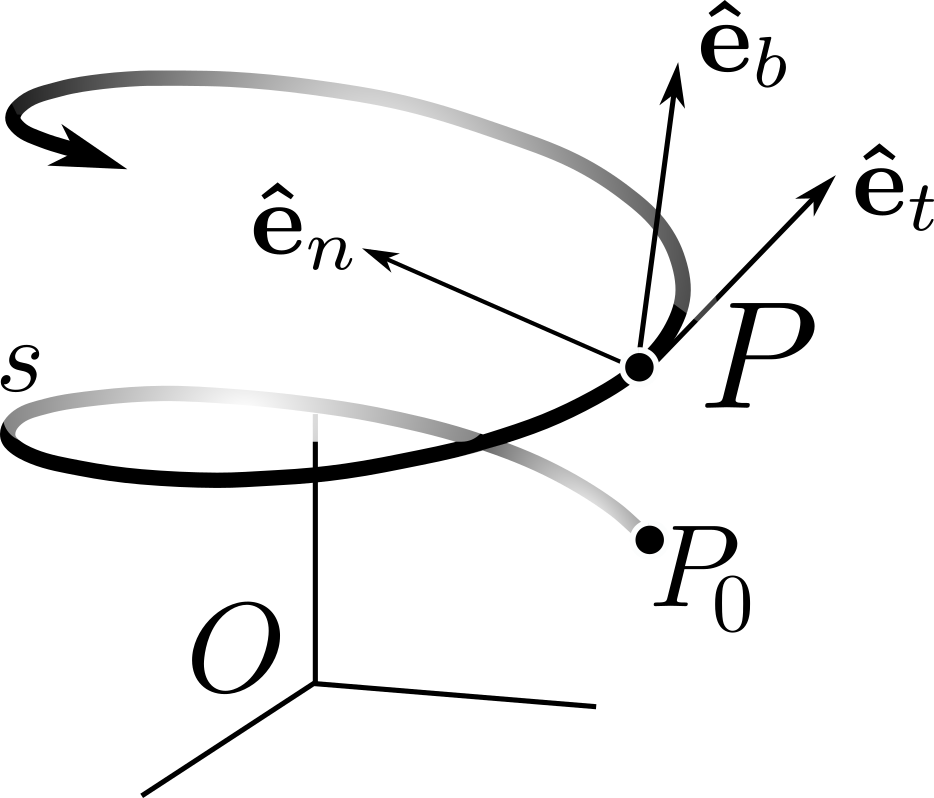
Figure2.4.1.The Frenet basis at \(P\text{.}\)
As \(P\) moves along \(\cC\text{,}\) the arc length \(s\) is an increasing function of time. We can find the velocity of \(P\) in \(\cE\) in the following manner:
\begin{equation*}
\lim_{\Delta s \to 0} \frac{ ( \br_{OP} (s+ \Delta s ) -
\br_{OP} (s) ) }{\Delta s }
\end{equation*}
we obtain a unit vector \(\be_t\) since the magnitude of \(\Delta \br = \br_{OP} (s+ \Delta s ) - \br_{OP} (s)\) tends to the arc length \(\Delta s\) in the limit \(\Delta s \to 0\text{.}\) This unit vector also tends to the tangent direction of \(\cC\) at \(P\text{,}\) and is directed in the sense of the motion. It depends only upon \(\cC\) and its orientation, and not upon the particular evolution of \(P\) on \(\cC\text{.}\)
Definition2.4.2.Unit tangent vector.
The unit tangent vector at \(P\) is the vector \(\be_t\) defined by
We note that the vector \(d \be_t / ds\) is necessarily orthogonal to \(\be_t\) since \(\be_t\) is a unit vector. Hence, we have decomposed the acceleration into a component \(\ba_{Pt} = \dv_P \be_t = \dds \be_t\) along the tangential direction and a component \(\ba_{Pn} = v_P^2 \; {d \be_t / ds}\) normal to the trajectory. Clearly, \(\ba_{Pt}\) reflects the time rate of change of the magnitude of the velocity vector \(\vel_P\text{.}\) Therefore \(\ba_{Pn}\) must reflect the time rate of change of the direction of \(\vel_P\text{.}\) We define the normal direction as follows:
Definition2.4.3.Principal normal.
The principal unit normal vector \(\be_n\) to the trajectory at \(P\) is defined by the equation
where the positive scalar\(\rho\) is referred to as the radius of curvature of the trajectory at \(P\text{.}\)
The curvature \(\kappa (s) =1/\rho = |\frac{d \be_t}{ds}|\) measures the deviation of \(\cC\) from a straight line. Equation (2.4.3) gives the following expression of the normal acceleration
The plane \((P, \be_t, \be_n)\) is called the osculating plane: it contains the trajectory \(\cC\) in a small neighborhood of \(P\text{.}\) The circle of center \(C\) and radius \(\rho\) defined by \(\br_{PC}= \rho \be_n\) is called the osculating circle at \(P\text{:}\) it is the circle that best approximates the trajectory of \(P\) in a small neighborhood of \(P\text{.}\) Point \(C\) is called the center of curvature of \(\cC\) at \(P\text{.}\)
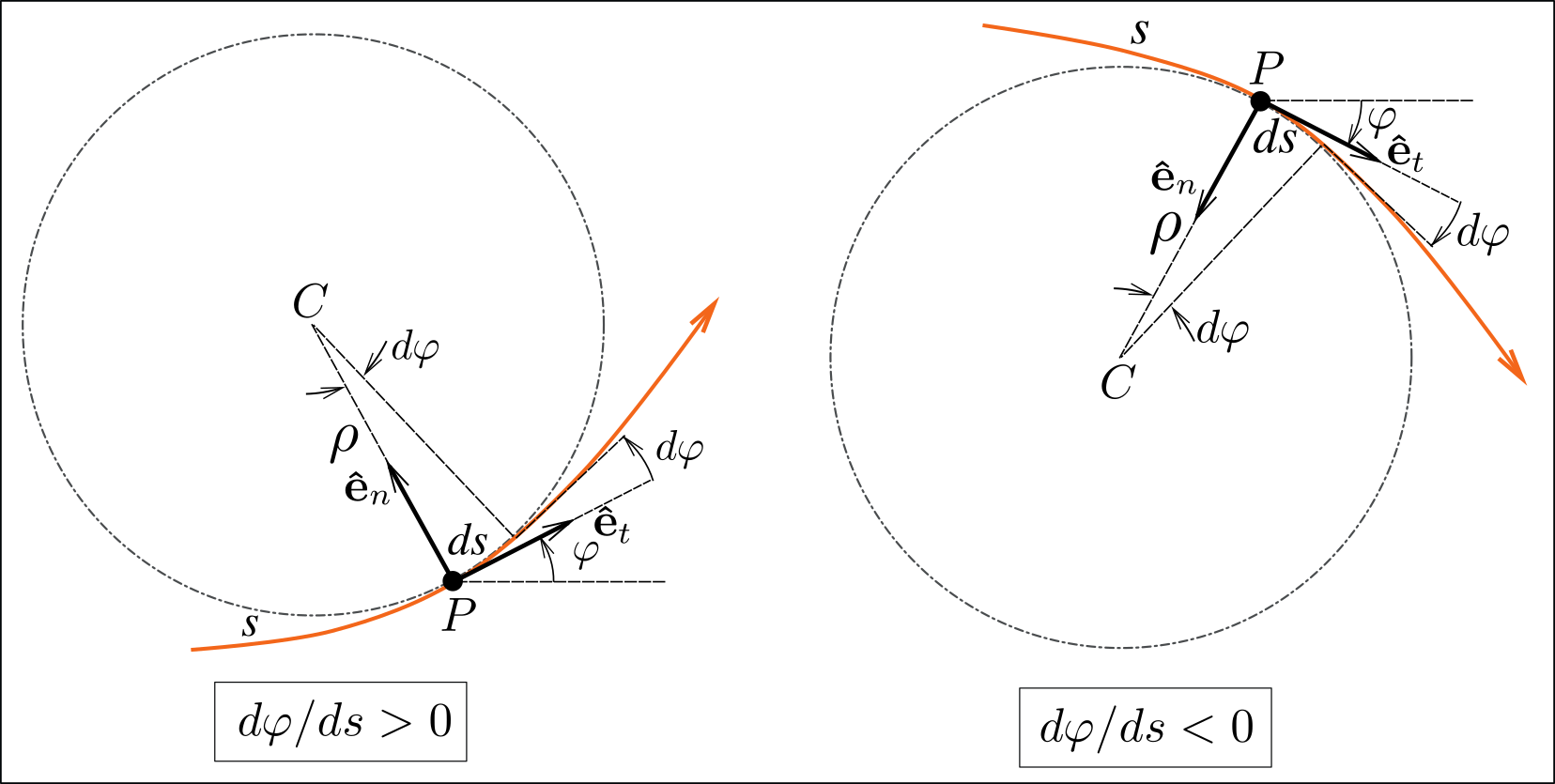
In order to gain more insight into equation (2.4.3), consider the case of a plane curve \(\cC\text{.}\) Let \(\varphi = (\be_x, \be_t ) \) be the angle made by vector \(\be_t\) with axis \(Ox\text{.}\) Angle \(\varphi\) is referred to the tangential angle or turning angle. Then we can write
The ratio \(|ds /d\varphi|\) is recognized as the radius of curvature \(\rho\) of a planar curve, that is, the radius of the osculating circle to the trajectory. Whether \(d\varphi / ds\) is positive or not, one can readily see that \(d\be_t / ds\) and hence \(\be_n = \rho (d\be_t / ds)\) (since \(\rho\) is always positive by convention) is always directed toward the center of curvature of the trajectory. Hence with the sign of \(\dv_P\) and the curvature of the curve at a particular position \(P\text{,}\) one can get an idea of the direction of the acceleration vector \(\ba_P\) at any location of the trajectory.
Figure2.4.4.The position of particle \(P\) is defined by intrinsic coordinates \(s\) (arc length) and \(\varphi\) (turning angle).
For a particle \(P\) moving along a space curve, a third unit vector can be defined as \(\be_b = \be_t \times \be_n\text{.}\) Being normal to \(\be_t\text{,}\) unit vector \(\be_b\) is also normal to the trajectory at \(P\) which we call binormal unit vector. Hence a right-handed basis \((\be_t , \be_n , \be_b )\) of unit vectors, called the Frenet basis, is defined at every location of \(P\) along its trajectory. The variation of these unit vectors along \(\cC\) is given by the Serret-Frenet formulas.
Theorem2.4.5.Serret-Frenet formulas.
The time-rate of change of unit vectors \((\be_t , \be_n , \be_b )\) are given by the formulas
To prove the last two Serret-Frenet formulas, we first use the fact that \(\be_n\) and \(\be_b\text{,}\) being unit vectors, are orthogonal to their derivatives. Hence there exist four scalars \(a\text{,}\)\(b\text{,}\)\(c\) and \(d\) such that
\begin{equation*}
\frac{d \be_n }{ ds} = a \be_t + b \be_b, \qquad \frac{d \be_b }{ ds} = c \be_t + d \be_n
\end{equation*}
To find these scalars, we differentiate the relations \(\be_t \cdot \be_n =0\text{,}\)\(\be_n \cdot \be_b =0\text{,}\) and \(\be_t \cdot \be_b =0\) w.r.t. arc length \(s\) and upon replacing \(d\be_t / ds\) by \(\be_n / \ro\text{,}\)\({d \be_n / ds}\) by \(a \be_t + b \be_b\text{,}\) and \({d \be_b / ds}\) by \(c \be_t + d \be_n\) we obtain
\begin{equation*}
a + 1/\ro = 0, \quad b+ d = 0 , \quad c = 0
\end{equation*}
Hence, we obtain (2.4.4) after writing \(b = 1/\tau = -d\text{.}\) Equation (2.4.5) is found from the expression of \(d\be_n / ds\text{:}\)
denoting \(\br = \br_{OP}\) and \((\cdot)' = d(\cdot)/ds\text{.}\)
Note that the radius of torsion, as opposed to the radius of curvature, is not necessarily positive. It measures the deviation of \(\cC\) from a planar curve.
We can summarize the results of this section with the following theorem.
Theorem2.4.6.Kinematics in N-T Components.
At any given time, it is possible to define two unit vectors \((\be_t,\be_n)\text{,}\) called tangential and principal normal unit vectors to the path at \(P\text{.}\) Then the velocity and acceleration of \(P\) take the expressions
where \(s\) and \(\rho\) are the arc length and the radius of curvature of the path at \(P\text{.}\)
The formulas (2.4.6) and (2.4.7) are fundamental in particle kinematics. They are expressed in terms of the local, intrinsic characteristics \(s\text{,}\)\(\rho\text{,}\)\(\be_t\text{,}\) and \(\be_n\) of the curve described by \(P\text{.}\)