Gravitational interactions are one of four fundamental action-at-a-distance interactions which are known to occur between particles. At the particle level, they are described by Newton’s law of gravitation. We are interested in a macroscopic description of gravitational interactions.
Subsection10.2.1Newton’s Law of Gravitation
The success of Newton in predicting the motion of a falling body on Earth or the motion of the planets around the Sun hinges on his law of universal attraction which can be stated as follows:
Definition10.2.1.Law of Gravitation.
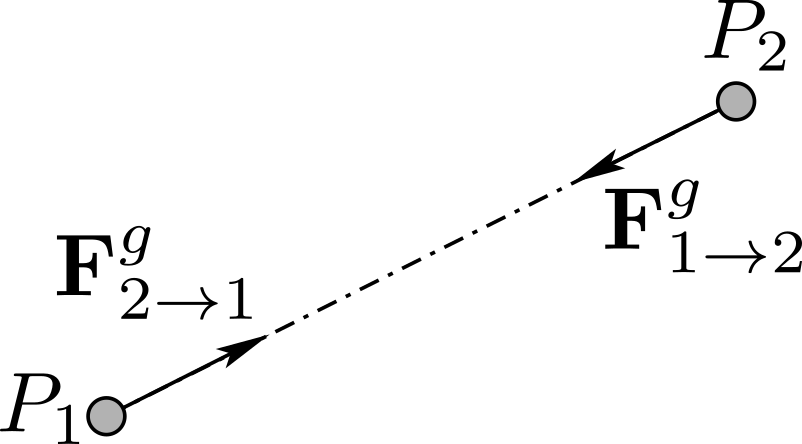
Two particles \(P_1\) and \(P_2\) of mass \(m_1\) and \(m_2\text{,}\) respectively, and at a distance \(r\) from each other, attract each other with a force proportional to their mass and inversely proportional to \(r^2\text{.}\) Hence, the force due to \(P_1\) on \(P_2\) can be written as
where \(G= 6.67 \times 10^{-11} \)N m\(^2\)kg\(^{-2}\) is a universal constant, called constant of gravitation.
Figure10.2.2.
Note that \(\bF_{2 \to 1}^g = - \bF_{1 \to 2}^g\text{.}\) Every mass particle attracts any other mass particle. However the effect of gravitational forces is only appreciable if at least one of the “particles” has a very large mass. For instance, on Earth’s surface we neglect the mutual attraction of bodies in comparison with Earth’s gravitational pull. This law is applicable for applications ranging from terrestrial mechanics to celestial mechanics.
Subsection10.2.2Gravitational Field
Definition10.2.3.Gravitational Field.
The effect of a discrete or continuous mass distribution \(\Sigma_1\) is equivalent to a gravitational field\(\bG_{\Sigma_1} (P)\) at any location \(P\) of space, such that, a particle of mass \(m\) located at point \(P\) at a particular instant would be subjected to the force
\begin{equation}
\bF_{\Sigma_1 \to P}^g = m \bG_{\Sigma_1} (P)\tag{10.2.2}
\end{equation}
For a discrete set of particles \(\Sigma_1 = \{ P_1 , P_2 , \cdots P_N \}\) of mass \(m_1\text{,}\)\(m_2\text{,}\)\(\cdots\) , \(m_N\text{,}\) we find
with \(r_i = |\br_{P_i P}|\) the distance from \(P_i\) to \(P\text{,}\) and \(\bu_i = \br_{P_i P} /r_i\) the unit vector directed from \(P_i\) to \(P\text{.}\) Hence the gravitational field is obtained by a superposition of individual fields. For a continuous mass system \(\Sigma_1\text{,}\) we obtain
where \(dm (P_1) = \rho (P_1) dV\) is an infinitesimal mass of volume \(dV\) surrounding \(P_1\text{.}\) In general, the calculation of this integral is difficult, unless certain assumptions are made, as will be done in Subsection 10.2.3.
The macroscopic gravitational effect of a material system \(\Sigma_1\) on material system \(\Sigma\) can then be modeled in terms of the gravitational action screw which takes the following form
For most terrestrial applications, one considers only the effects of Earth’s gravitational forces, that is, one neglects the gravitational effects of all celestial bodies other than that of Earth, because such systems are too far, or their mass is too small relative to that of Earth. Furthermore, for applications which take place in domains of small dimensions compared to that of Earth, one may assume that the gravitational field \(\bG_{\Earth\to \Si} (P)\) to be approximately uniform.
However, in many applications of celestial mechanics, these assumptions are not adequate and one must then resort to use better approximations of Earth’s gravitational field \(\bG_{\Earth\to \Si} (P)\) to obtain useful expressions of \(\{ \cA^g_{\Earth \to \Si}\}\text{.}\)
Subsection10.2.3Gravitational Field of a Body with Spherical Symmetry
Most celestial bodies such as Earth are spherical to a first order of approximation. In addition, their mass density can be considered to be only a function of the distance \(r\) from their center. Such bodies are said to possess spherical material symmetry. Then, by symmetry, the resulting gravitational field at any point is only a function of the radial distance measured from this point to the center of the body. More specifically, we can state the following result:
Theorem10.2.4.Gravitational Action of Spherical Body.
The gravitational field created at a point \(P\) by a body \(\Sigma_1\) of spherical material symmetry, of mass \(M_1\) and center \(G_1\text{,}\) is given by
if point \(P\) is exterior to \(\Sigma_1\text{.}\) Hence, the gravitational field of a body with spherical material symmetry is equivalent to the gravitational field produced by a point mass located at center \(G_1\) of mass \(M_1\text{.}\)
Proof.
The proof is provided by the divergence theorem for the flux of gravitational field \(\bG_{\Sigma_1} (P)\) across a surface \(\partial \Omega\) enclosing a domain \(\Omega\)
\begin{equation*}
\int_{\partial\Omega} \bG_{\Sigma_1} \cdot \bn \, dA =
\int_\Omega \nabla \cdot \bG_{\Sigma_1} dV =
-4\pi G \int_\Omega \rho dV
\end{equation*}
where \(\bn\) being the outward unit normal to surface \(\partial \Omega\text{.}\) Recall that \(\nabla \cdot \bG_{\Sigma_1} = - 4\pi G \rho (P)\) where \(\rho\) is the local mass density. Let us choose for \(\partial\Omega\) the sphere of center \(G_1\) and radius \(r\text{.}\) Due to the spherical symmetry we expect \(\bG_{\Sigma_1}\) to be of the form \(\bG_{\Sigma_1}(P) = g(r) \be_r\) for all \(P\) on \(\partial \Omega\text{,}\) where \(\be_r = \bn\) is unit radial vector at \(P\text{.}\) This leads to
With \(\int_\Omega\rho dV = M_1\text{,}\) we obtain \(g(r)=- G M_1/r^2\text{.}\) Note that the same approach allows for the determination of field \(\bG_{\Sigma_1}\) at a point \(P\) of the interior of \(\Sigma_1\text{.}\)
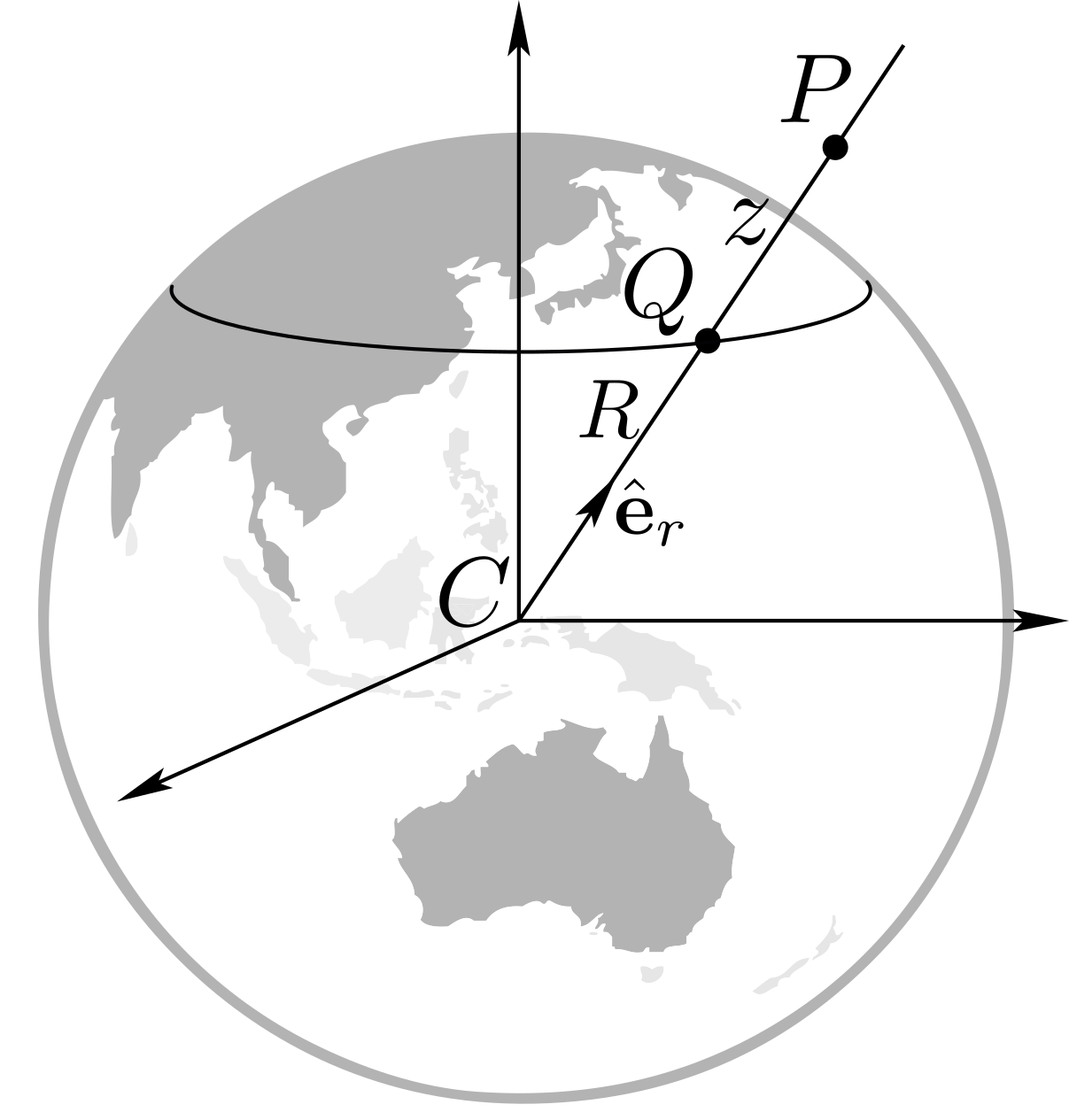
The Gravitational Field of Earth: We can treat Earth as a body of spherical material symmetry of center \(C\) and radius \(R\text{:}\) indeed, the difference between the equatorial radius \(R_E\) and the polar radius \(R_P\) leads to the value \(1/300\) of the ratio \((R_E - R_P)/R_E\text{.}\) Then, the gravitation field at a point \(P\) located at altitude \(z\) above Earth’s surface (see Figure 10.2.5) is given by (with \(r = R+z\)):
\begin{equation}
\bG_{E}(P) = - G \frac{M_E}{(R+z)^2}\be_r \tag{10.2.7}
\end{equation}
where \(M_E\) is Earth’s mass, and \(\be_r\) is the unit vector directed from \(C\) to \(P\text{.}\) If \(z \ll R\text{,}\) we can approximate \(1/(R+z)^2\) as \((1- 2z/R)/R^2\) to first order, and we obtain
is the gravitational field at ground level. Hence, it is seen that the magnitude of Earth’s gravitational field decreases with altitude, though the variation is very weak: with \(R = 6,400\) km, we find a decrease of \(1\%\) at elevation \(z = 32\) km. Its direction also varies weakly: two points on the surface of the Earth whose corresponding unit vectors \(\be_r\) make an angle of one degree are separated by a distance of \(110\) km. Hence, we see that, for most terrestrial applications, we may treat the gravitational field as a constant vector in both magnitude and direction:
With \(M_E = 6 \times 10^{24}\) kg, we find \(g_0 \approx 9.81\) m/s\(^2\text{.}\) In this case, the gravitational action screw \(\{\cA_{\Earth\to \Si}^g\}\) takes the form
where \(m_\Si\) denotes the mass of system \(\Si\text{,}\) and \(G\) denotes the mass center of \(\Si\text{.}\)
Figure10.2.5.
In the following problem, a correction term is obtained for the expression (10.2.11) of the gravitational action screw due to a body with spherical material symmetry on a “small” body.
Example10.2.6.(Small body approximation).
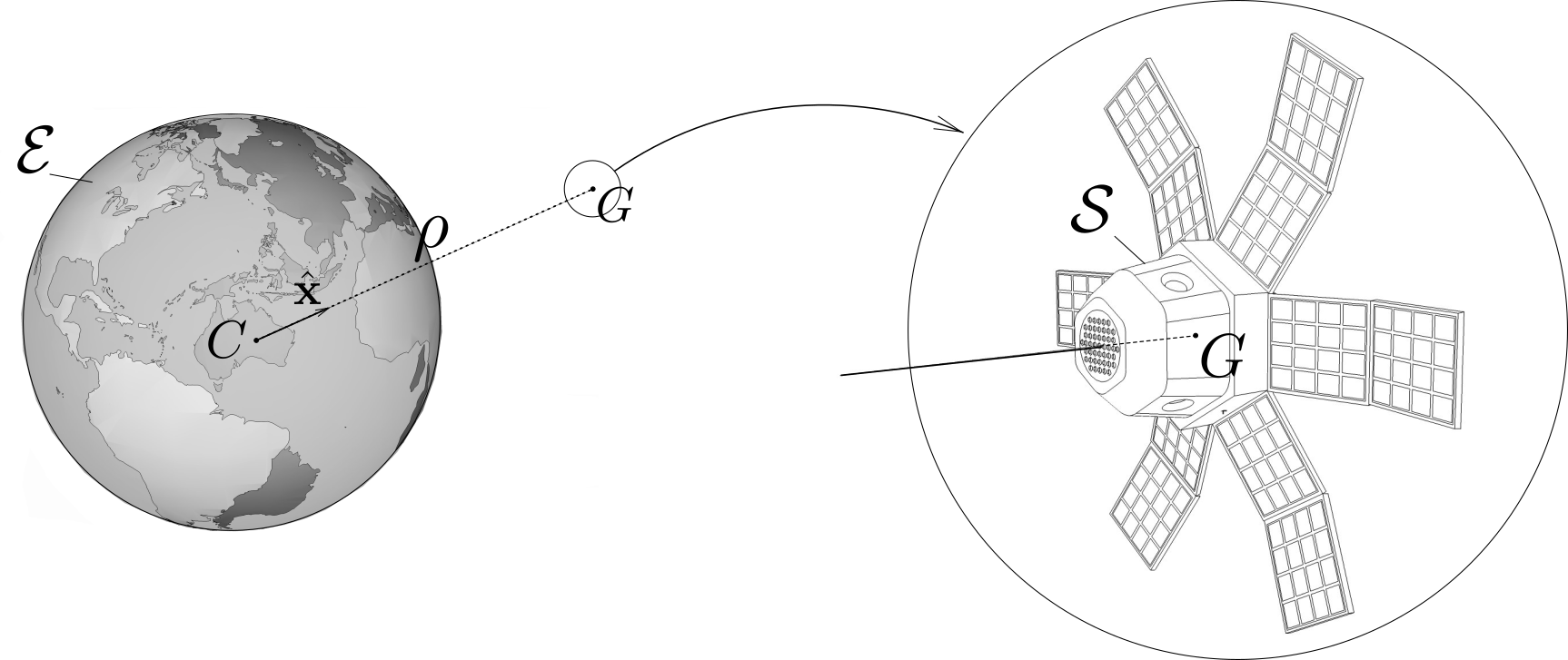
Consider the gravitational effect of Earth \(\cE\) (of mass \(M\text{,}\) and mass center \(C\text{.}\) possessing spherical material symmetry on a satellite \(\cS\) (of mass \(m\text{,}\) and mass center \(G\)) considered small in relation to its distance to Earth. See Figure 10.2.7.
Show that the resulting gravitational action screw \(\{\cA^g_{\cE \to \cS}\}\) is given by
where unit vector \(\bx\) is defined by \(\br_{CG} = \rho \bx\text{,}\) and where \((\bx, \by, \bz)\) forms a right-handed basis. The scalars \(I_{Gx}= \bx \cdot \cI_G (\bx)\text{,}\)\(I_{Gy} =\by \cdot \cI_G (\by)\text{,}\) and \(I_{Gz}= \bz \cdot \cI_G (\bz)\) are moments of inertia about mass center \(G\text{.}\) The scalars \(I_{Gxy} = \bx \cdot \cI_G (\by)\text{,}\)\(I_{Gxz} = \bx \cdot \cI_G (\bz)\) are the corresponding products of inertia.
Hint.
To derive this result, assume that \(\br \equiv \br_{GP}\) is much smaller in magnitude than \(\rho = |\br_{CG}|\) for any point \(P\) of \(\cS\text{,}\) and expand the expression \((1+ 2 \bx\cdot \br /\rho+ \br^2 /\rho^2)^{-3/2}\) up to second-order in powers of \(|\br| /\rho \ll 1\text{.}\)
Figure10.2.7.
Solution.
We first find the general expression of the resultant of the action screw by using \(\bG_{\cE} (P) = - G M(\rho\bx + \br)/|\rho\bx + \br|^3\) and denoting \(\br = \br_{GP}\text{:}\)
where we have used the fact that \(\int_\cS \br \, dm = \bze\text{.}\) Each of the integrals in the brackets (the second-order terms) can be expressed in terms of the inertia characteristics of \(\cS\) about its mass center: by writing \(\br = x\bx + y\by + z\bz\) we find
Note that, as expected, the second-order term vanishes for a body \(\cS\) of spherical material symmetry, that is, when \(I_{Gx}= I_{Gy}= I_{Gz}\) and \(I_{Gxy} = I_{Gxz} = 0\text{.}\) To find the moment about mass center \(G\text{,}\) we first write
With \(\int_{\cS} \br \times \bx (\bx\cdot \br) dm = \int_{\cS} x (-y \bz + z\by)dm =
(I_{Gxy} \bz - I_{Gxz} \by)\text{,}\) we find the final results.
Subsection10.2.4Weight of a Particle and Gravitational Acceleration
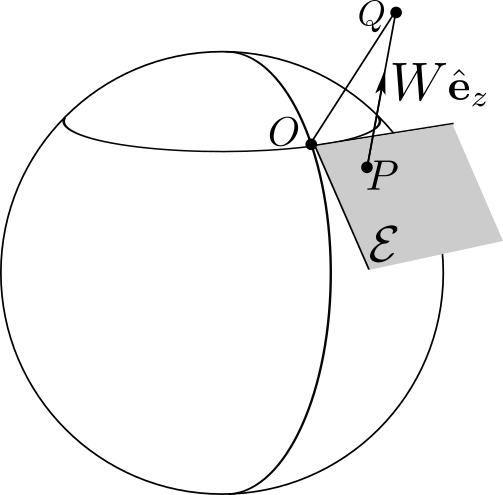
Consider a plumb line experiment in a referential \(\cE\text{,}\) whereby a particle \(P\) of mass \(m\) is suspended by a string attached at a point \(Q\) fixed in \(\cE\text{.}\) See Figure 10.2.9. If \(P\) is at rest in \(\cE\text{,}\) we call vertical in \(\cE\) the direction taken by the plumb line.
Definition10.2.8.Gravitational Acceleration.
The weight\(\bW\) of particle \(P\) of mass \(m\) in referential \(\cE\) is the force which balances the tension in the string of a plumb line experiment (in the absence of any other external perturbing influence). Then, the gravitational acceleration at the location of \(P\) in \(\cE\) is the vector field \(\bg (P)\) defined by
\begin{equation}
\bW = m \bg (P)\tag{10.2.12}
\end{equation}
Figure10.2.9.Plumb line experiment.
Hence, the weight of a particle and the corresponding gravitational acceleration depend on the local value of the gravitational field \(\bG\) created by one or more celestial bodies and on the transport acceleration of referential \(\cE\) relative to a (Newtonian) referential \(\cF\) relative to which it is in motion:
The same particle of mass \(m\) will have a different weight whether the plumb line experiment is done on Earth, on the Moon, in the space station, or in an elevator in acceleration.
In terrestrial applications, \(\bg\) is mostly a function of Earth’s gravity field \(\bG = \bG_E\) (which is mostly a function of elevation) and to a much lesser extent a function of Earth’s rotation (thus dependent of latitude). The latter effect is obtained by evaluating \(\ba_{P\in\cE /\cF}\) relative to the geocentric referential \(\cF\text{.}\) The following problem quantifies the effect of Earth’s rotation.
Example10.2.10.
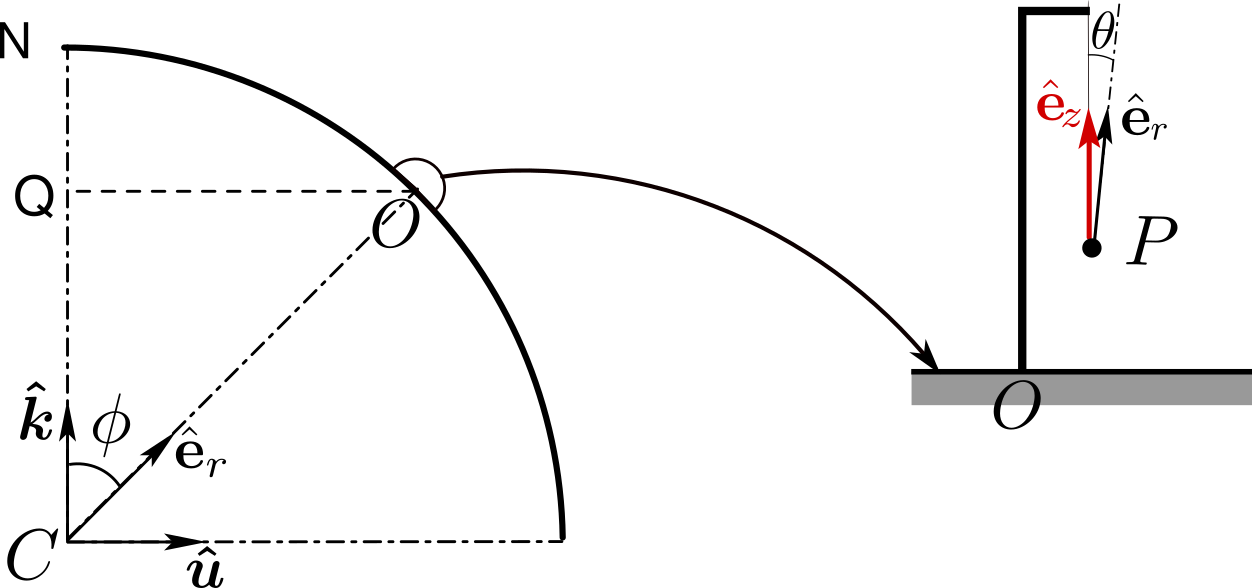
Consider the plumb line experiment done in the terrestrial referential \(\cE\) attached to Earth at a colatitude \(\phi\text{.}\) Apply Newton’s second law relative to the geocentric referential\(\cF\) about which a terrestrial referential \(\cE\) rotates with angular velocity \(\bom_{\cE/\cF} = \omega_E \bk\text{,}\) that is, solve equation
\begin{equation*}
-m g_0 \be_r + W \be_z = m \ba_{P/\cF}
\end{equation*}
to find the weight \(W\) of a particle \(P\) of mass \(m\text{,}\) and the angle \(\theta\) taken by the vertical \(\be_z\text{.}\) Use the expression \(\ba_{P/\cF} = \om_E \bk \times (\om_E \bk \times \br_{CP})\approx \om_E^2 \br_{OQ}\text{.}\) See Figure 10.2.11 for the definitions of unit vectors \(\bk, \be_z, \be_r\text{.}\)
Figure10.2.11.
Solution.
We treat Earth as a body of spherical material symmetry, and neglecting the effect of altitude (\(z=0\)), we approximate the gravitational field as \(\bG_{E}(P) = - g_0 \be_r\) with \(g_0 = {G M_E / R^2}\text{.}\) We denote by \(\be_z\) the unit vector along the string from \(P\) to the attachment point \(Q\text{,}\) by \(\be_r\) the unit vector directed from Earth’s center \(C\) to \(P\) or to any point “nearby” such as origin \(O\text{.}\) The string tension is given by \(W \be_z\text{,}\) denoting by \(W\) the weight of particle \(P\) in \(\cE\text{.}\) If we account for the rotation of the Earth, the equilibrium of \(P\) is now governed by the equation
\begin{equation*}
m \ba_{P / \cF } = -m g_0 \be_r + W \be_z
\end{equation*}
where \(\cF\) is the so-called geocentric referential defined by Earth’s axis of rotation \(SN\text{,}\) with two additional axes pointing to “fixed stars”, and about which referential \(\cE\) (Earth) has angular velocity \(\bom_{\cE / \cF}= \om_E \bk\text{,}\) with \(\om = 2 \pi\)\(\rm rad/day\text{.}\)\(\bk\) is the unit vector directed from the south pole \(S\) to the north pole \(N\text{.}\) The change of referential formula for acceleration gives us
since \(P\) is fixed in \(\cE\text{,}\) and the motion of \(\cE\) relative to \(\cF\) is a uniform rotation about axis \((C, \bk)\text{.}\) Unit vector \(\bu\) is defined as the vector perpendicular to \(\bk\) lying in the plane containing axis \((C, \bk)\) and point \(P\text{.}\) Hence, the equilibrium equation of \(P\) becomes
\begin{equation*}
-m g_0 \be_r + W \be_z + m R \om_E^2 \sin\phi \; \bu = \bze
\end{equation*}
Let us define the ratio \(\ep\) of accelerations by
With \(R = 6400\) km, \(\om_E = \frac{2\pi}{24\times 3600}\)\(\rm rad/s\text{,}\) and \(g_0 = 9.8\)\(\rm m/s^2\text{,}\) we obtain a very small value \(\ep = 0.0034\text{.}\) Now from the vectorial equation
we can determine the direction of the vertical \(\be_z\) and the weight \(W\) in referential \(\cE\text{:}\) denote by \(\te\) the angle \((\be_r , \be_z)\text{.}\) To eliminate \(W\) from equation (1), take the cross-product with \(\be_z\) to obtain
To obtain the weight \(W\) and the corresponding gravitational acceleration \(g\) in \(\cE\text{,}\) take the scalar product of equation (1) with \(\be_r\)
\begin{equation*}
W = mg , \qquad g = g_0 (1 - \ep \sin^2 \phi) .
\end{equation*}
The maximum angle \(\te\) leading to the minimum gravitational acceleration is obtained at colatitude \(\phi = \pi /4\text{:}\)
These results show that considering \(\cE\) as a Newtonian referential for a body at rest is a valid approximation: the error incurred by neglecting the Earth’s rotation is very small.
A more detailed description of the gravitational acceleration \(\bg (P)\) at a point \(P\) of the surface of the Earth can be given by including the effect of the gravitational field generated by both the Moon \(\bG_M\) and the Sun \(\bG_S\text{,}\) and by accounting for the transport acceleration relative to a heliocentric referential \(\cF\text{:}\)
where the transport acceleration \(\ba_{P\in\cE /\cF}\) includes the acceleration \(\ba_{C/\cF}\) of the mass center of the Earth around the Sun, in addition to the term \(-\omega_E^2 \br_{QP}\) accounting for the rotation of the Earth about its axis
where point \(Q\) is the projection of \(P\) on the Earth’s axis of rotation. To find \(\ba_{C/\cF}\) we apply Newton’s second law for the motion of \(C\) relative to referential \(\cF\)
\begin{equation*}
M \ba_{C/\cF} = M ( \bG_M (C) + \bG_S (C) )
\end{equation*}
under the gravitational attraction of the Moon and the Earth.
Definition10.2.12.Tidal Acceleration.
The terrestrial gravitational acceleration can be expressed in the form
where \(G_M\) and \(G_S\) are the gravitational fields generated by the Moon and the Sun, respectively. The differential terms \(\bG_M (P)-\bG_M (C)\) and \(\bG_S (P)- \bG_S (C)\) are called tidal accelerations.
Remark10.2.13.
The contributions of the tidal accelerations to \(\bg(P)\) are responsible for the tidal phenomena of the Earth’s oceans, and for other celestial phenomena.
The following problem attempts to give an explanation of the ocean’s tides.
Example10.2.14.
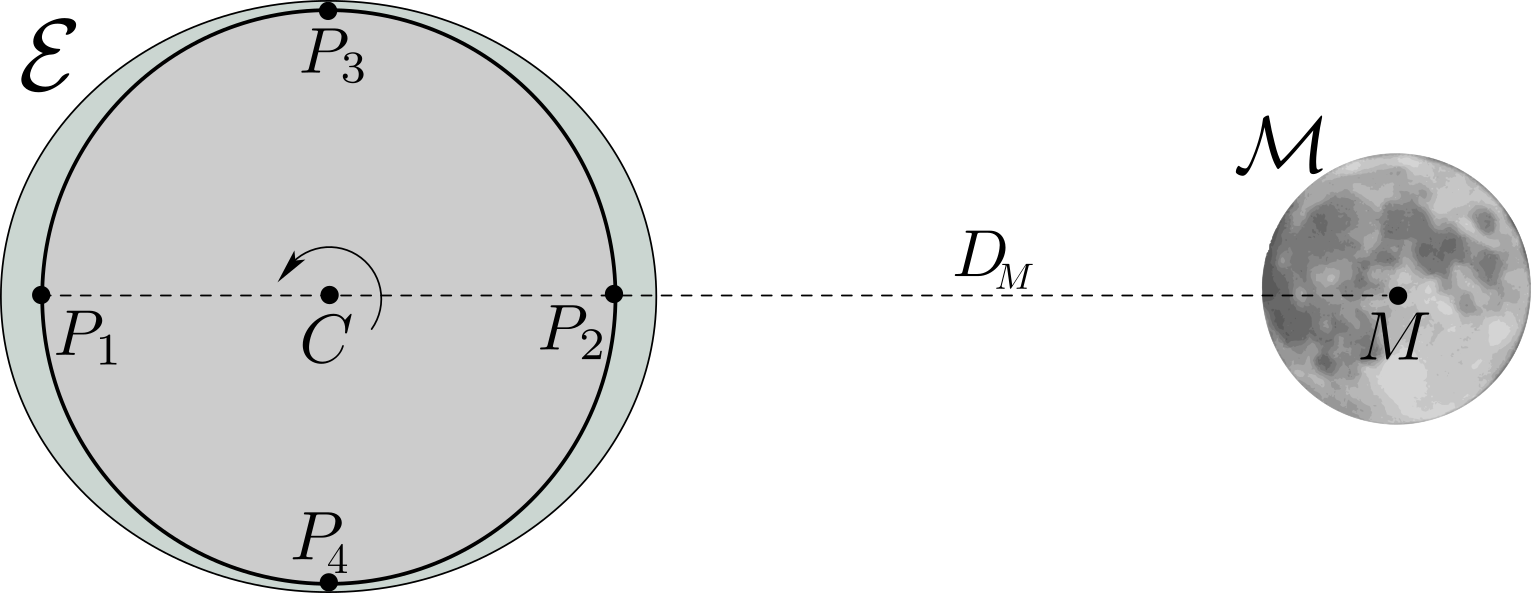
Consider the system Earth-Moon shown in Figure 10.2.15. The plane of the figure is assumed to be the equatorial plane of Earth containing the mass center \(M\) of the Moon. Both bodies are assumed spherical and of homogeneous mass. The lines \(CM\) intersects Earth’s surface at points \(P_1\) and \(P_2\text{.}\) Find the tidal accelerations \(\bG_M (P)-\bG_M (C)\) at these two diametrically opposed points to show that two effects of opposed directions and equal magnitude are obtained, thus explaining the bulging of the oceans at these locations (high tides). Assume that the distance \(D_M = |CM|\) is much larger than Earth radius \(R\text{.}\) How many daily high tides are obtained? Where are low tides obtained?
To assess the strength of the Moon’s tidal acceleration relative to that of the Sun, evaluate the ratio \(|\bG_M (P_1)-\bG_M (C)|/ |\bG_S (P_1)-\bG_S (C)|\text{.}\) Use \(D_M / D_S= 2.5 \times 10^{-3}\) and \(m_M /m_S = 3.65 \times 10^{-8}\text{.}\)
Figure10.2.15.
Solution.
Denote by \(\bu\) the unit vector \(\br_{CM} /|\br_{CM}|\text{.}\) Assuming that the Moon is spherical and homogeneous, its gravitational field at points \(P_1\text{,}\)\(P_2\) and \(C\) are given by (denoting \(m_M\) the mass of the Moon)
where we have used the fact that \(R/D_M \ll 1\text{.}\) We have thus obtained two opposed tidal accelerations of equal magnitude at \(P_1\) and \(P_2\text{.}\) This explains the rising of Earth’s ocean surface.
Tidal phenomena vary in time due to the Earth’s rotation about its axis. Assuming the Moon stationary relative to a geocentric referential, a given meridian will reach the position \(P_1 P_2\) twice a day, thus leading to two high tides per day. In reality, the Moon has a period of 27 days around the Earth, leading to high tides every 12h25min. Low tides are obtained at the locations of a meridian which is perpendicular to line \(P_1 P_2\text{.}\)
We can replace the role played by the Moon by that of the Sun:
This shows that the Moon’s tidal force is stronger than that of the Sun by a factor of 2.3. These two effects are superimposed when the Sun and Moon become aligned with Earth: this happens about twice a month, at the new and full moons, leading to a maximum range between low and high tides.