Consider now a rigid body\(\cB\) of mass center \(G\text{,}\) and mass \(m\text{,}\) in motion relative to a referential \(\cE\text{.}\) We show in this section that the determination of the angular momentum of body \(\cB\) depends on the mass distribution of \(\cB\) through the definition of its inertia operator.
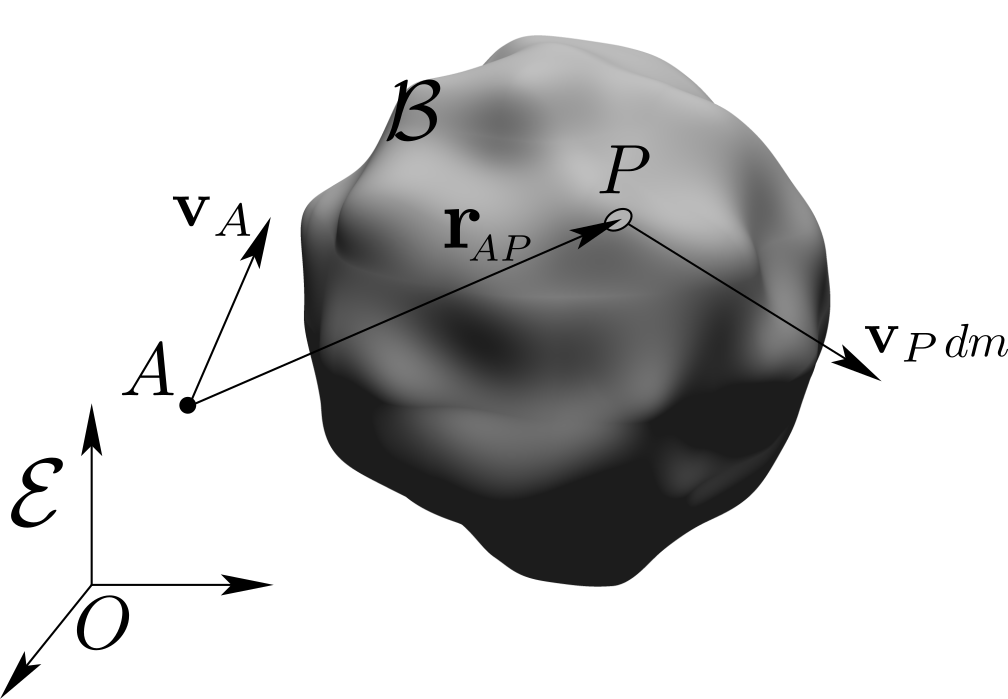
Figure9.5.1.
Consider an arbitrary point \(A\) about which the angular momentum \(\bH_A = \bH_{A, \cB / \cE}\) is sought. Point \(A\) may be in motion relative to \(\cE\text{,}\) and is in general not necessarily attached to \(\cB\text{.}\) In the expression
we can relate the velocity of generic point \(P\) to that of a particular point attached to \(\cB\text{.}\) Denote the chosen point as \(B\text{.}\) Then
We then obtain two integrals. The first integral \(\int_{\cB} \br_{AP} \times \vel _{B\in \cB} \, dm\) is readily shown to be \(m \br_{AG} \times \vel _{B\in\cB}\text{.}\) We then express the second integral by writing \(\br_{AP} =
\br_{AB}+ \br_{BP}\text{:}\)
In this last equation, the first term is simply \(m \br_{AB}\times (\bom_{\cB} \times
\br_{BG} )\text{.}\) We are left with the integral \(\int_{\cB} \br_{BP}\times (\bom_{\cB}
\times \br_{BP} ) \, dm\) which leads us to define the notion of inertia operator.
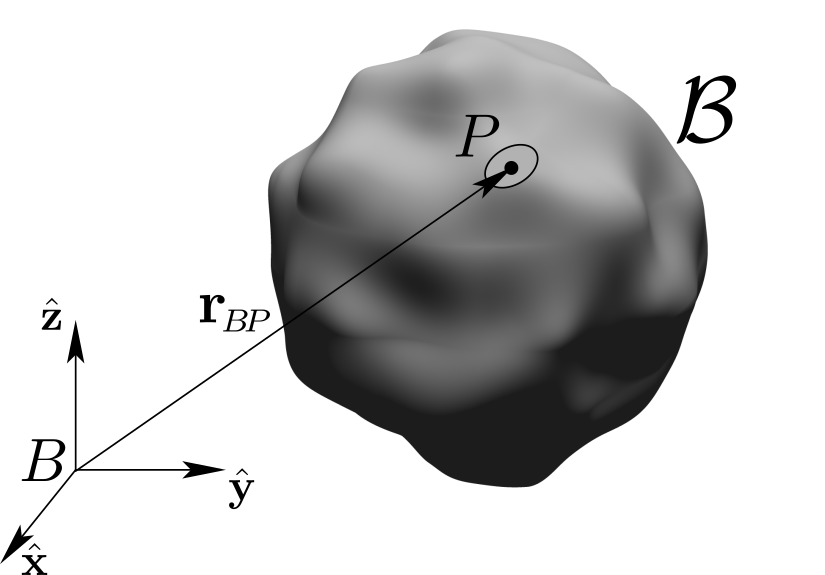
Definition9.5.2.Inertia Operator.
The inertia operator, denoted \(\iner\text{,}\) of rigid body \(\cB\) about point \(B\) is the operator defined by
In practice, the determination of \(\iner\) is done by choosing a basis of unit vectors \(b ( \bx,\by,\bz)\) (generally attached to \(\cB\)) as shown in Figure 9.5.4. By writing \({\bf r}_{BP}= x \bx + y \by + z \bz\text{,}\) it is possible to determine the corresponding matrix representation of the inertia operator \(\iner\) on this basis (see Subsection A.1.5). With the determination of the triple products
The diagonal element \(I_{Bx}\text{,}\)\(I_{By}\) and \(I_{Bz}\) of inertia matrix \([\cI_B]_b\) are called moments of inertia with respect to axis \((B,\, \bx)\text{,}\) axis \((B,\, \by)\text{,}\) and axis \((B,\, \bz)\text{,}\) respectively. They are given by the inertia operator \(\iner\) according to
The off-diagonal terms \(I_{B xy}\text{,}\)\(I_{B xz}\text{,}\) and \(I_{B yz}\text{,}\) are called products of inertia of \(\cB\) with respect to rectangular axes \(Bxyz\text{.}\) They are given by the inertia operator \(\iner\) according to
Moment \(I_{Bx}\) is not specific to point \(B\) but rather to axis \((B,\bx)\text{:}\) indeed, the integrand \((y^2 +z^2)\) is the squared distance from point \(P\) to axis \((B,\bx)\text{.}\)
Remark9.5.7.
The basis \({ b}(\bx , \by , \bz)\) is generally taken as fixed to rigid body \(\cB\text{.}\) The corresponding matrix of inertia is then independent of time when \(\cB\) is in motion relative to referential \(\cE\text{.}\) However, the matrix of inertia may still be independent of time for a basis not fixed to \(\cB\) in special cases of symmetry.
Remark9.5.8.
There is no simple physical interpretation of the products of inertia. In fact, they can always be found to vanish with an appropriate choice of axes for the representation of \(\iner\text{,}\) as shown by the following result.
Theorem9.5.9.Principal Axes of Inertia.
For any point \(B\text{,}\) there always exists a basis \((\bx_p , \by_p , \bz_p)\text{,}\) called principal basis of inertia at point \(B\text{,}\) such that the corresponding inertia matrix is diagonal, that is, for which the products of inertia are zero. The corresponding moments of inertia are then called principal moments of inertia.
Proof.
This result is a consequence of the symmetry of operator \(\iner\text{.}\)
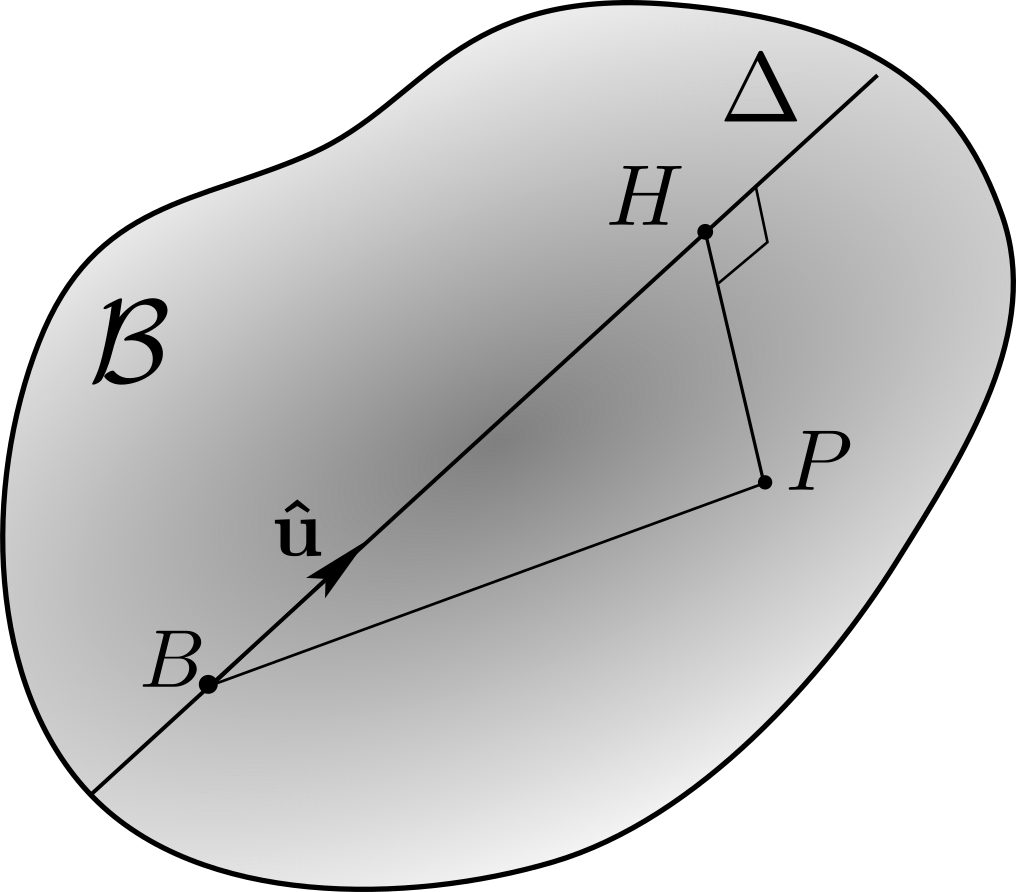
The diagonal elements of the inertia matrix \([\iner]_b\) on basis \({b}(\bx , \by , \bz)\) define three moments of inertia about the rectangular axes \(Bxyz\text{.}\) Operator \(\iner\) can actually lead to the determination of any moment of inertia about any axis \(\Delta\) passing through \(B\text{.}\) In view of the expressions of moments of inertia \(I_{Bx}\text{,}\)\(I_{By}\) and \(I_{Bz}\text{,}\) moment of inertia \(I_{\Delta}\) is defined as
where point \(H\) is the projection of \(P \in \cB\) onto axis \(\Delta\text{.}\) See Figure 9.5.10. Its determination is given by the following theorem.
Figure9.5.10.
Theorem9.5.11.Moment of inertia about an axis \(\Delta\).
The moment of inertia \(I_\Delta\) of body \(\cB\) about an axis \(\Delta\) passing through \(B\) is given by operator \(\iner\) according to
As a special case, we verify that the moment \(I_{Bx}\) can be obtained as \({\bx} \cdot \, {\iner}(\bx)\) according to (9.5.5) by choosing \(\bu = \bx\text{.}\)
Finally, we ask if the inertia operators of a given body can be related from one point to another. The answer is provided by the so-called parallel axis theorem: it relates the inertia operator \(\iner\) about point \(B\) of \(\cB\) to inertia operator \(\inerG\) about mass center \(G\text{.}\)
Theorem9.5.12.Parallel Axis Theorem.
The inertia operator \(\iner\) about point \(B\) of body \(\cB\) can be obtained from inertia operator \(\inerG\) about its mass center \(G\) according to
Note that the last term \(m \br_{BG} \times ( \bvv \times \br_{BG} )\) in equation (9.5.6) may be viewed as the inertia operator about point \(B\) of the “system” defined as particle \(G\) of mass \(m\text{.}\)
Remark9.5.15.
The consequence of this result is that knowing the inertia operator about one point \(B\) implies the knowledge of the inertia operator about any other point \(Q\text{:}\)
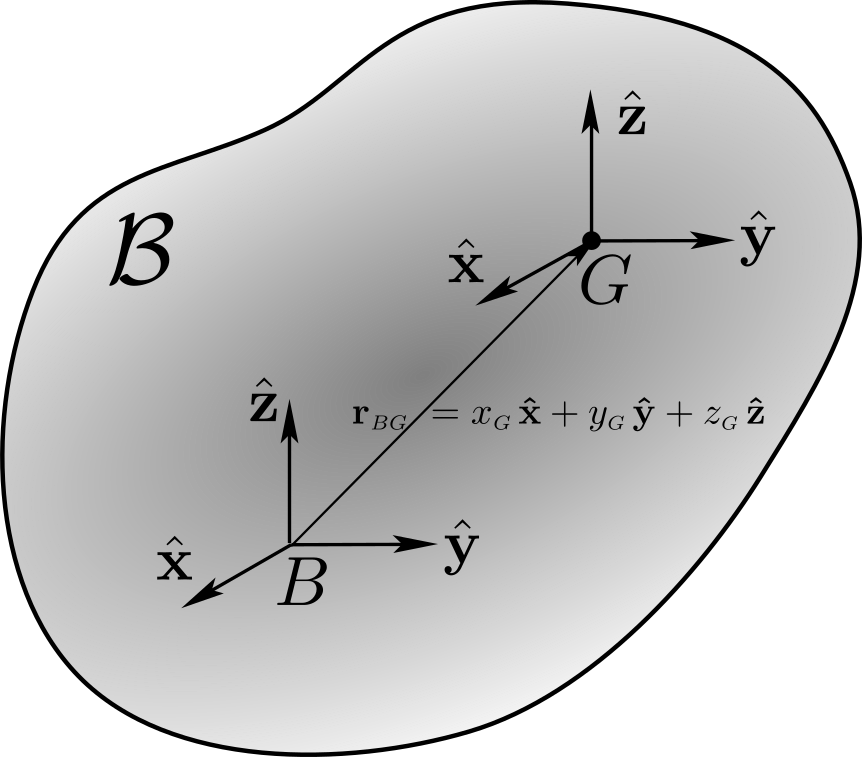
By choosing a basis \(( \bx,\by,\bz)\text{,}\) it is possible to relate moments and products of inertia about point \(B\) to those about mass center \(G\text{.}\) See Figure 9.5.13. For instance, the relationship between moment \(I_{Bx}\) about axis \((B,\bx)\) and moment \(I_{Gx}\) about (parallel) axis \((G, \bx)\) is found to be
where \((y^2_G + z^2_G)\) is seen to be the squared distance between the two axes. Similarly, the products \(I_{Bxy}\) and \(I_{Gxy}\) are related according to
In the form of (9.5.8)-(9.5.9), we can now understand why Theorem 9.5.12 is referred to as the Parallel Axis theorem.
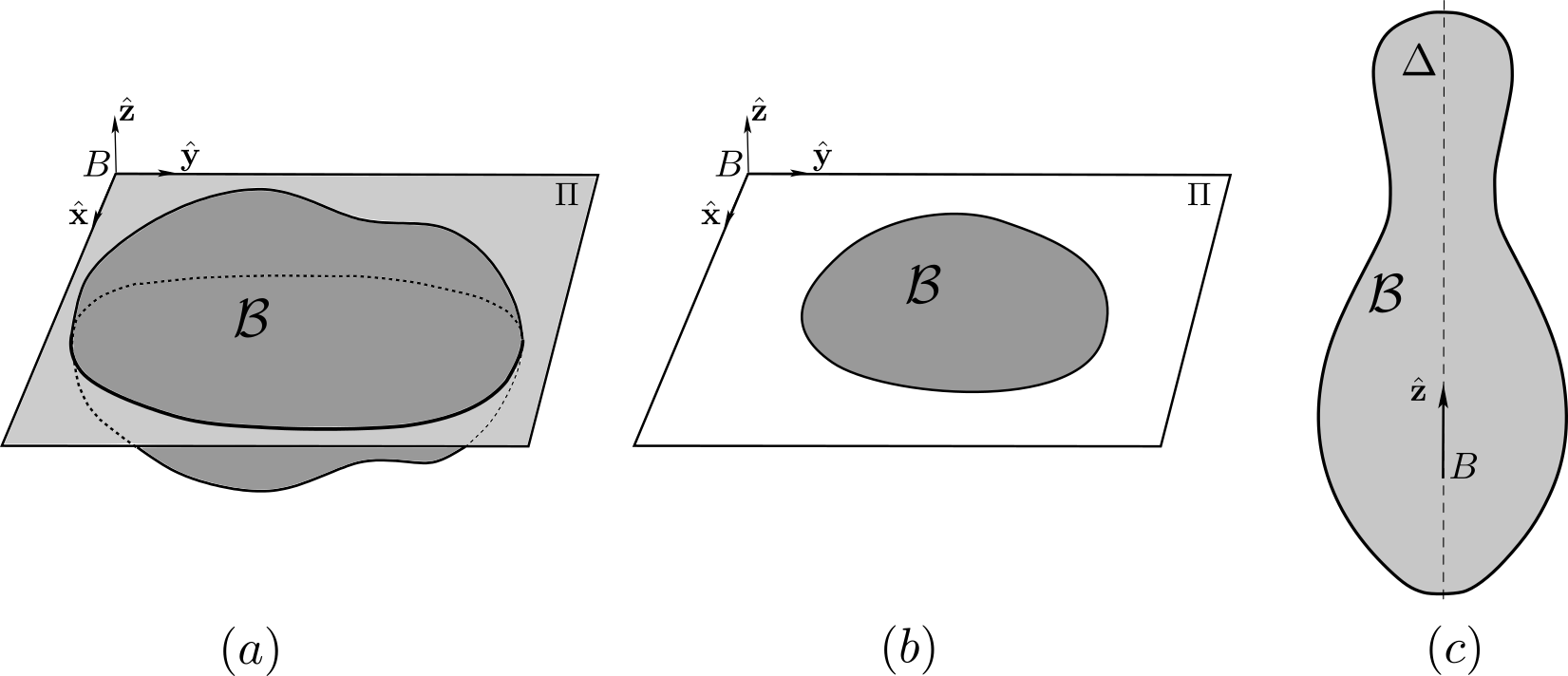
In practice, it is advantageous to choose a point \(B\) and a basis \((\bx,\by,\bz)\) which leads to the simplest determination of the corresponding inertia matrix. One approach consists of exploiting the special characteristics of the rigid body \(\cB\) at hand, such as material symmetries. Here are three special cases:
Case 1: Body \(\cB\) admits a plane \(\Pi\) of material symmetry. Then we choose \((B ,\bx,\by)\) in plane \(\Pi\) and unit vector \(\bz\) normal to \(\Pi\text{.}\) See Figure 9.5.17(a). To any point \(P(x,y,z)\) of density \(\rho (P)\) corresponds a point \(P'(x,y,-z)\) of same density \(\rho(P')= \rho(P)\text{.}\) This leads to the following inertia matrix
Case 2: Body \(\cB\) is a plate, that is, it can be viewed as a planar figure of negligible thickness. Then we choose \((B, \bx,\by)\) as the plane containing \(\cB\text{,}\) with \(\bz\) normal to \(\cB\text{.}\) See Figure 9.5.17(b). Points \(P \in \cB\) are characterized by \({\bf r}_{BP}=x \bx+y\by\text{.}\) This leads to \(I_{Bxz}=I_{Byz} =0\) and \(I_{Bz}=I_{Bx}+I_{By}\) and to the following inertia matrix:
Case 3: Body \(\cB\) admits an axis of revolution \(\Delta (B,\bz)\text{.}\) See Figure 9.5.17(c). Then the inertia matrix about \(B\) is invariant under an arbitrary rotation about axis \(\Delta\) directed along unit vector \(\bz\text{.}\) This leads to the following expression
on any orthonormal basis \(b ({\bf -},{\bf -},\bz)\) not necessarily attached to \(\cB\text{.}\)
The inertia properties of standard shapes are listed in Section B.1. In all cases, a particular set of axes \(Bxyz\) is chosen so as to take into account the body’s symmetries. The mass density is assumed uniform throughout the body. From this data, we can find moments/products of inertia of complex (composite) bodies by using the extensive property of these quantities:
If rigid body \(\cB_0 = \cB_1 \bigcup \cB_2\) is assembled as the union of two bodies \(\cB_1\) and \(\cB_2\) without intersection, then
These properties are illustrated with the following examples.
Example9.5.18.
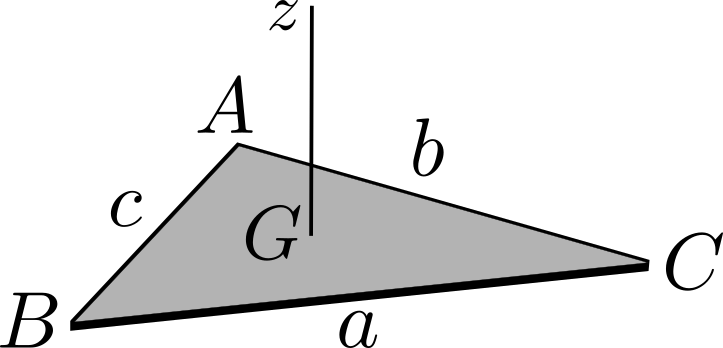
Consider an arbitrary triangle \(ABC\) of side lengths \(a\text{,}\)\(b\) and \(c\) and mass center \(G\text{.}\) Show that its moment of inertia about axis \(Gz\) is given by
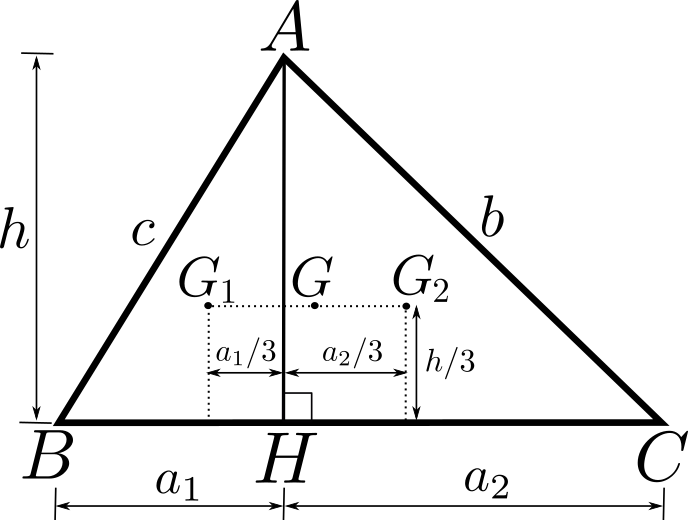
We will use a combination of the extensive property of moments of inertia and the Parallel Axis theorem by splitting the triangle into two right-triangular plates of mass center \(G_1\) and \(G_2\) and mass \(m_1 = m a_1/a\) and \(m_2 = m a_2/a\text{,}\) respectively. See Figure 9.5.20. We assume that \(A\) can be projected onto side \(BC\) to obtain point \(H\text{.}\) We know the moment of inertia of each right triangle \(AHB\) (partition 1) and \(AHC\) (partition 2) about \(H\) (see Section B.1):
Finally, we need to express \(a_1\) and \(a_2\) in terms of \((a,b,c)\text{:}\) in triangle \(ABC\) the law of cosines gives (denoting by \(\te\) the angle at \(B\text{.}\)
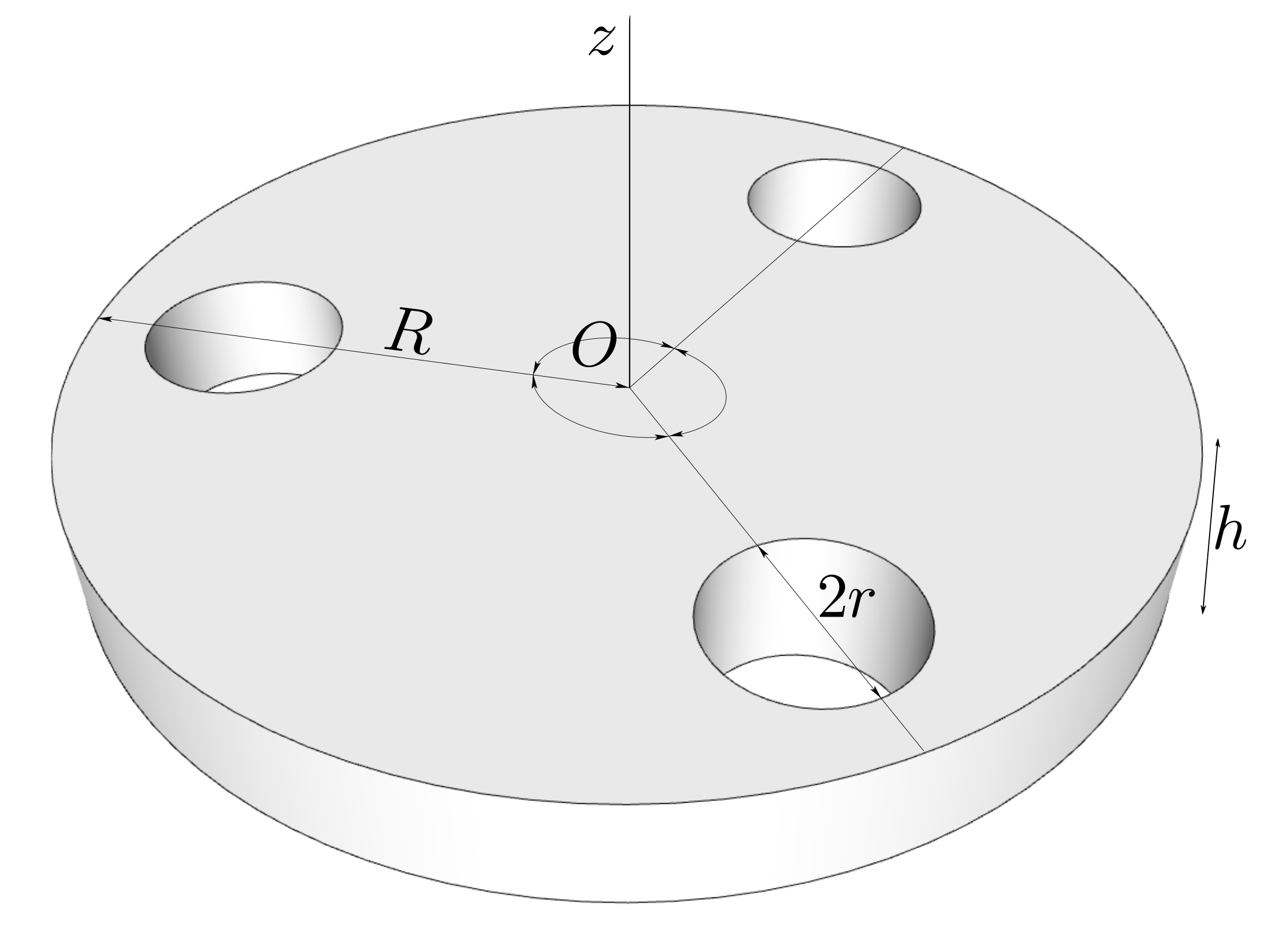
Consider the body \(\cB\) obtained by boring three cylindrical, evenly spaced holes into a cylinder \(\cB_0\) of axis \(O z\text{,}\) radius \(R\) and height \(h\text{.}\) The cylindrical bores \(\cB_i\) (\(i=1,2,3)\) have radius \(r\) and axis \(G_i z\) a distance \(d\) from axis \(O z\text{.}\) Denote by \(m\) the mass and \(G\) the mass center of body \(\cB\text{.}\)
Show that the inertia matrix of body \(\cB\) about \(G\) has the form
\begin{equation*}
[\cI_G]_b =
\begin{bmatrix}
A \amp 0 \amp 0 \\
0 \amp A \amp 0 \\
0 \amp 0 \amp C
\end{bmatrix}_{b}
\end{equation*}
on any basis \(b (-,-, \bz)\text{.}\) Then find the moments \(A\) and \(C\text{.}\)
Figure9.5.22.
Solution.
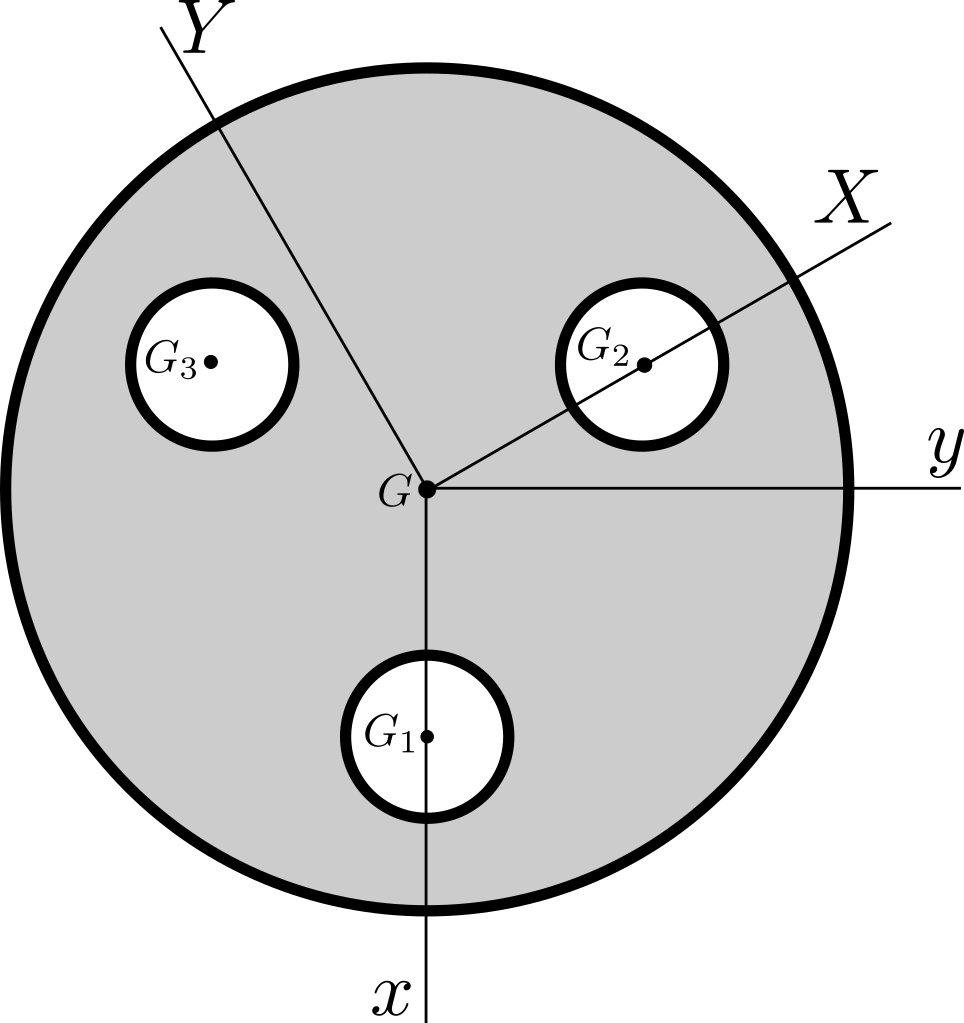
To find the inertia operator \(\cI_G\) of body \(\cB\text{,}\) we must take into account its symmetry. More specifically, the body’s mass distribution is invariant under a rotation of angle \(\al=2\pi/3\) about axis \(Oz\text{.}\) This implies that its mass and products of inertia on rectangular axes \(Gxyz\) and \(GXYZ\) obtained by rotation of angle \(\al\) about \(Oz=OZ\) are identical. See Figure 9.5.23. This rotation is characterized by the following coordinate transformations:
\begin{equation*}
X= x \cos\al + y \sin\al, \qquad Y= -x \sin\al + y \cos \al, \qquad Z =z
\end{equation*}
Starting with product of inertia \(I_{GXY}\text{,}\) we find
Upon setting \(I_{GXY}= I_{Gxy}\text{,}\)\(I_{GX}= I_{Gx}\) and \(I_{GY}= I_{Gy}\text{,}\) we deduce that
\begin{equation*}
I_{Gxy}= 0, \qquad I_{Gx}= I_{Gy}= A
\end{equation*}
Furthermore, the symmetry of the body with respect to plane \(Gxy\) implies that \(I_{Gxz}= I_{Gyz}= 0\text{.}\)
Figure9.5.23.
To find the axial moment \(C= I_{Gz}\text{,}\) we use \(I_{G_i z, i} = \half m_1 r^2\) for cylinder \(\cB_i\) (of mass \(m_i= m_1\text{.}\) leading to \(I_{Gz, i}= m_1 (r^2 /2 + d^2)\text{.}\) We then impose the equality \(I_{Gz} + 3 I_{Gz,i} = I_{Gz,0}\) to find
with \(m_0 = m+ 3m_1\) and \(m_1 = m_0 r^2/R^2\text{.}\) To find the transverse moment \(A= I_{Gx}\text{,}\) we choose axis \(Gx\) to pass through mass center \(G_1\) of cylinder \(\cB_1\) (as shown in Figure 9.5.23): then \(I_{Gx,1}= I_{G_1 x, 1}= m_1 (r^2 /4 + h^2/12)\text{.}\) For cylinders \(\cB_2\) and \(\cB_3\text{,}\) we find \(I_{Gx,2}= I_{Gx,3} = m_1 (r^2 /4 + h^2/12) + 3m_1 d^2 /4\) (using the Parallel Axis Theorem). This gives