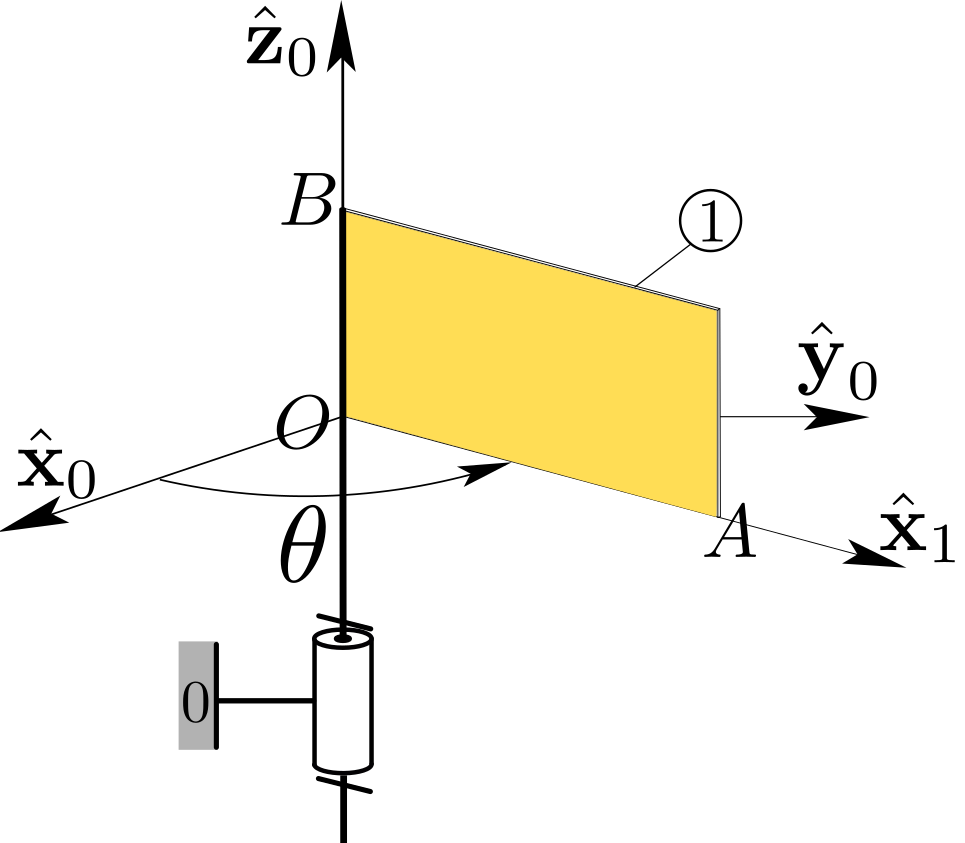
Consider the rectangular plate 1 of Example 12.2.4 Using the same assumptions regarding the forces acting on body 1, apply the KET to find a scalar equation. How does this equation relate to the FTD?
Figure12.7.2.
Solution.
We found the total external power \(\Pow_{\bar{1}\to 1/0}\) in Example 12.2.4.
In other words, equation (1) is nothing but the \(\bz_0\)-component of the dynamic moment equation about \(O\) premultiplied by \(\dte\text{.}\)
Example12.7.3.
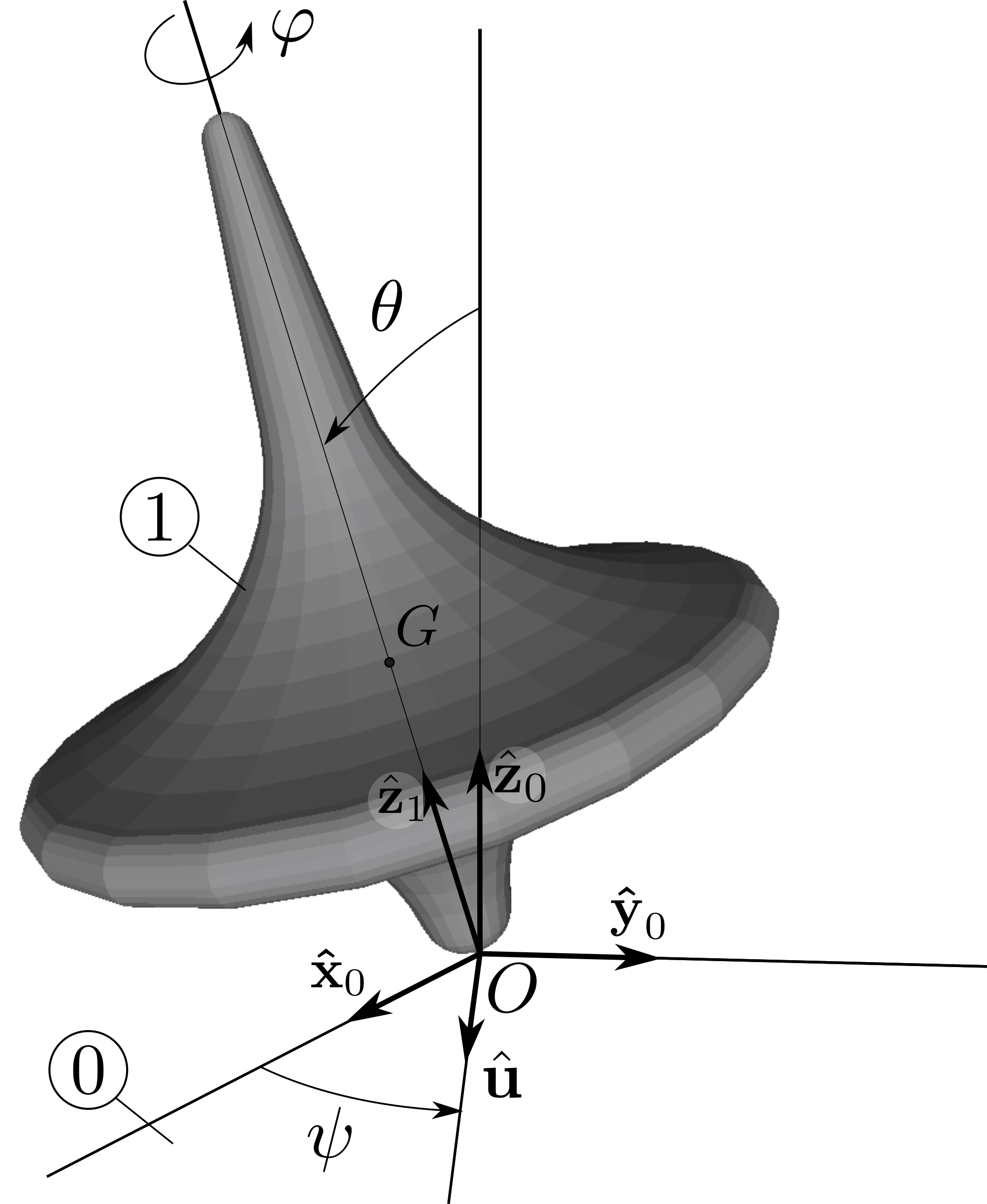
A spinning top 1\((O,\bx_1, \by_1,\bz_1)\) of mass center \(G\) and mass \(m\) is in motion in a referential 0\((O,\bx_0, \by_0,\bz_0)\) in such a way that its tip \(O\) remains stationary relative to 0. The connection between 0 and 1 is equivalent to a frictionless spherical joint. The upward vertical is directed along \(\bz_0\text{.}\) The orientation of body 1 relative to 0 is defined in terms of the three angles \((\psi,\te, \phi)\) according the following sequence of rotations:
The top is axisymmetric about axis \((O,\bz_1)\text{.}\) The position of its mass center is defined by \(\br_{OG}= l \bz_1\text{.}\) Its inertia operator about \(O\) is entirely defined by its axial moment of inertia \(C= \bz_1 \cdot \cI_O (\bz_1)\) and its transverse moment of inertia \(A= \bx_1 \cdot \cI_O (\bx_1)= \by_1 \cdot \cI_O (\by_1)\text{.}\) The top is under the sole effect of gravity and contact forces, neglecting rolling and pivoting friction.
Figure12.7.4.
Apply the Kinetic Energy Theorem to body 1 and find a first-integral of motion.
Solution.
Step 1: kinematics. With \(\bom_{1/0} = \dpsi \bz_0 + \dte \bu + \dphi \bz_1\) and \(\vel_{O\in 1/0} =\bze\text{,}\) we find the expression of the kinematic screw of the top
Step 2: kinetic energy. We find the KE of the top as a body rotating about fixed point \(O\) by representing inertia operator \(\cI_O\) on basis \(b (\bu,\bw,\bz_1)\) (using \(\bom_{1/0} \cdot\bz_1 = \dpsi \cos\te +\dphi\text{,}\)\(\bom_{1/0}\cdot \bw= \dpsi \sin\te\text{,}\) and \(\bom_{1/0}\cdot \bu= \dte\)):
Step 3: action screw. We find the contributions to action screw \(\{\cA_{\bar{1}\to 1}\}\)
\begin{equation*}
\{\cA_{\bar{1}\to 1}\}=
\begin{Bmatrix}
-m g \bz_0 \\\bze
\end{Bmatrix}_G
+
\begin{Bmatrix}
\bR_O \\ \bze
\end{Bmatrix}_O
=
\begin{Bmatrix}
\bR_O -m g \bz_0 \\ mg l \sin\te \bu
\end{Bmatrix}_O
\end{equation*}
Step 4: We find the power \(\Pow_{\bar{1}\to 1/0}\text{:}\)
\begin{equation*}
\Pow_{\bar{1}\to 1/0}= mg l \sin\te \bu \cdot \bom_{1/0}
= mg l \dte \sin\te
= - \frac{d}{dt}( mg l \cos\te)
\end{equation*}
Step 5: We apply the KET \(\tfrac{d}{dt} \kin_{1/0} = \Pow_{\bar{1}\to 1/0}\) to find
\begin{equation*}
\frac{d}{dt}\Big(
A (\dpsi^2 \sin^2\te + \dte^2) + C (\dpsi \cos\te +\dphi)^2
\Big)
= - \frac{d}{dt}( 2mg l \cos\te)
\end{equation*}
which yields a first-integral of motion (conservation of mechanical energy):
\begin{equation*}
A (\dpsi^2 \sin^2\te + \dte^2) + C (\dpsi \cos\te +\dphi)^2 + 2mg l \cos\te = Cst
\end{equation*}
Note that we could have used the potential energy \(\pot_{earth \to 1 /0} = mg l \cos\te\text{.}\)
Example12.7.5.
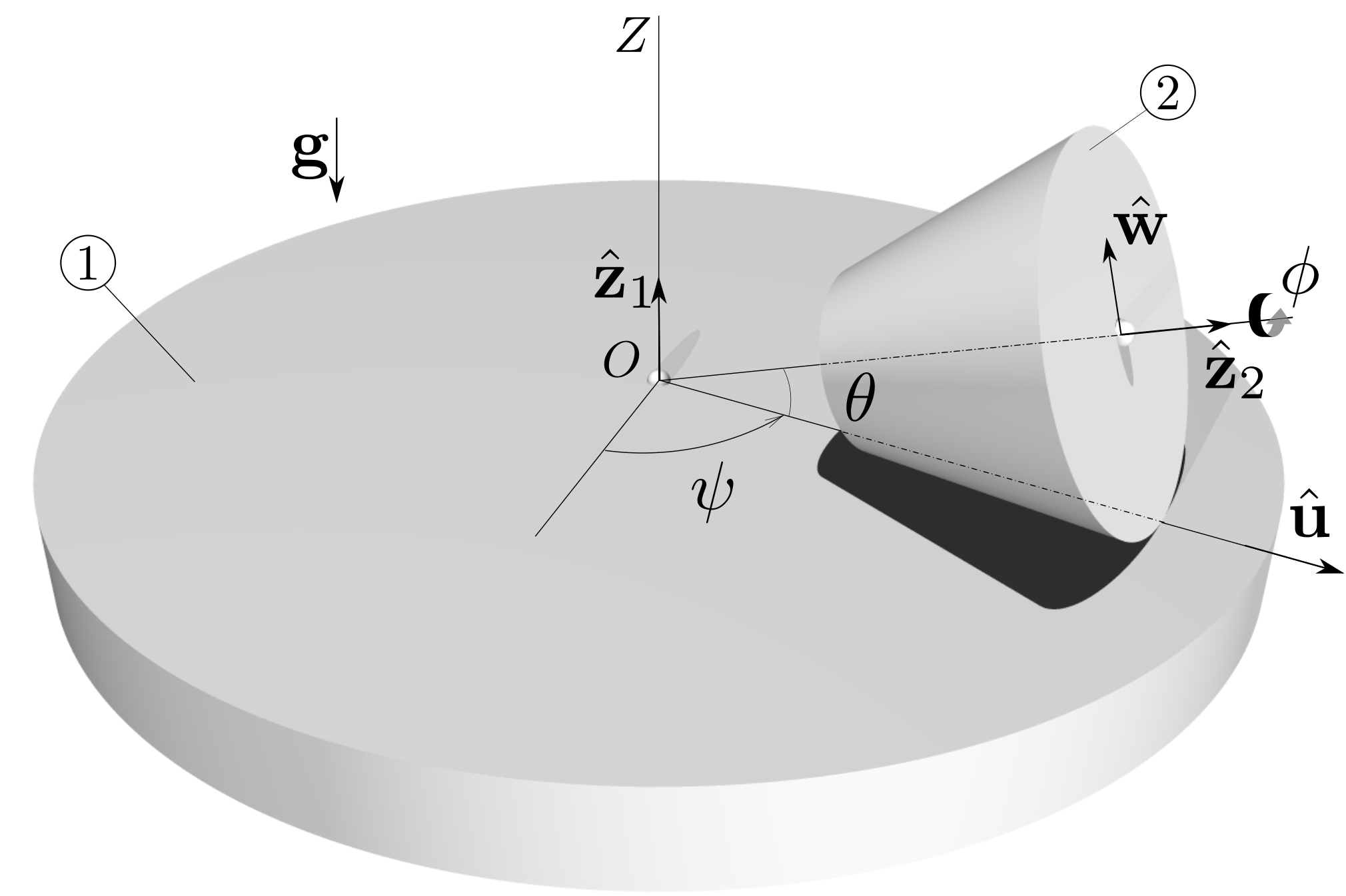
Figure 12.7.6 shows a truncated right-circular cone 2 of half-angle \(\theta\text{,}\) uniformly-distributed mass \(m\text{,}\) and mass center \(G\text{.}\) It is in motion relative to a horizontal support 1 in such a way that (i) one of its generatrix lines is in contact with 1, and (ii) its axis always passes through fixed point \(O\) of 1, (iii) it does not slip relative to 1.
Figure12.7.6.
Its motion relative to 1 is entirely specified by the angles \(\psi\) and \(\phi\text{.}\) Denote by \(I_1\) the moment of inertia of 1 about axis \(OZ\text{,}\) by \(A_2\) and \(C_2\) the transverse and axial moments of inertia which characterize the inertia operator \(\cI_{O,2}\) of body 2.
Assume that support 1 is stationary. Apply the KET to body 2 relative to body 1.
Now assume that support 1 is in rotation about vertical axis \(OZ\) at angular velocity \(\Omega\) under the action of a motor of couple \(\cC\) mounted between 1 and the supporting frame 0. Apply the KET to 2 relative to 0, and then to the system \(\Sigma=\{1, 2\}\) relative to 0. Assume that the connection between 1 and 0 is an ideal pivot of axis \(OZ\text{.}\)
Solution.
a. If body 1 is stationary, we can apply the KET to body 2 relative to body 1:
where we have accounted for contact forces distributed along the contact line \(AB\) (with \(\bv = \bz_1 \times \bu\)), and the no-slip kinematic condition \(\vel_{Q\in 2/1} = \bze\text{.}\)
It results that kinetic energy \(\kin_{2/1}\) remains constant during the motion (thus yielding a first-integral of motion). To find \(\kin_{2/1}\text{,}\) we first find angular velocity \(\bom_{2/1}= \dpsi \bz_1 + \dphi \bz_2\text{.}\) Imposing the no-slip condition at \(Q\) gives the condition \(\dpsi = - \dphi \sin\te\) and \(\bom_{2/1}= -\dpsi\cot\te \bu\text{.}\)
The kinetic energy \(\kin_{2/1}\) is then given by
This implies that \(\dot{\psi} =\) constant (or \(\dot{\phi} =\) constant).
b. If body 1 is in rotation, we cannot apply the KET to 2 relative to 1 which is no longer Newtonian. We find power \(\Pow_{\bar{2}\to 2/0}\) as in question a):
where we have used \(\vel_{Q\in 2/0} = \vel_{Q\in 2/1} +\vel_{Q\in 1/0}=\vel_{Q\in 1/0}= \Omega l \bv\) (denoting \(l= |OQ|\)). We end up with an integral expression whose value cannot be explicitly written in terms of the motion variables \((\Omega, \psi, \phi)\text{.}\)
The situation is different if we apply the KET to the system \(\Sigma=\{1,2\}\) relative to 0:
Note here that we have to account for the internal interaction between 1 and 2 in the term \(\Pow^c_{1\leftrightarrow 2}\) which is in fact identical to \(\Pow^c_{1\to 2/1} =0\text{.}\)