The axis\(\Delta\) of screw \(\{\cV\}\) of non-zero resultant \(\bV\) is defined as the set of points \(Q\) about which the moments are collinear to \(\bV\text{:}\) hence for all points \(Q\) of \(\Delta\text{,}\) there exists a scalar \(p\) such that \(\bvv_Q = p \bV\text{.}\)
Note first that couples do not possess an axis. Assuming \(\bV \neq 0\text{,}\) the axis \(\Delta\) of a screw is in fact not an empty set. It can be found by solving for the position vector \(\br_{OQ}\) solution of the vector equation
\begin{equation}
\bV \times \br_{OQ} = p \bV - \bvv_O\tag{4.6.1}
\end{equation}
relative to some arbitrary point \(O\) of \(\cE\text{.}\)
A necessary condition for equation (4.6.1) to have a solution is that the resultant \(\bV\) be orthogonal to \((p \bV - \bvv_O)\text{.}\) This leads to the following expression for scalar \(p\text{:}\)
We recognize in (4.6.2) the scalar invariant of \(\{\cV\}\text{:}\)\(p\) is not a function of point \(O\text{,}\) but rather is a quantity intrinsic to screw \(\{\cV\}\text{.}\)
To solve equation (4.6.1), we first note that if \(\br_{OQ^*}\) is a particular solution, then \(\br_{OQ^*} + \lambda \bV\) is also solution for all scalars \(\lambda\text{:}\) hence the general solution of (4.6.1) is of the type: \(\br_{OQ} = \br_{OQ^*} + \lambda \bV\text{,}\) where \(\br_{OQ^*}\) is a particular solution orthogonal to \(\bV\text{.}\) This shows that the axis is a straight line directed along \(\bV\text{.}\)
To find a particular solution, we take the cross-product of both sides of (4.6.1) with \(\bV\) to find:
The points \(Q\) of \(\Delta\) satisfy \(\bvv_Q = p \bV\) with
\begin{equation}
p = \frac{\bV \cdot \bvv_O}{\bV^2}\tag{4.6.5}
\end{equation}
We call \(p\) the pitch of screw \(\{\cV\}\text{.}\)
Note that the location of axis \(\Delta\) is independent of the choice of point \(O\) in formula (4.6.4).
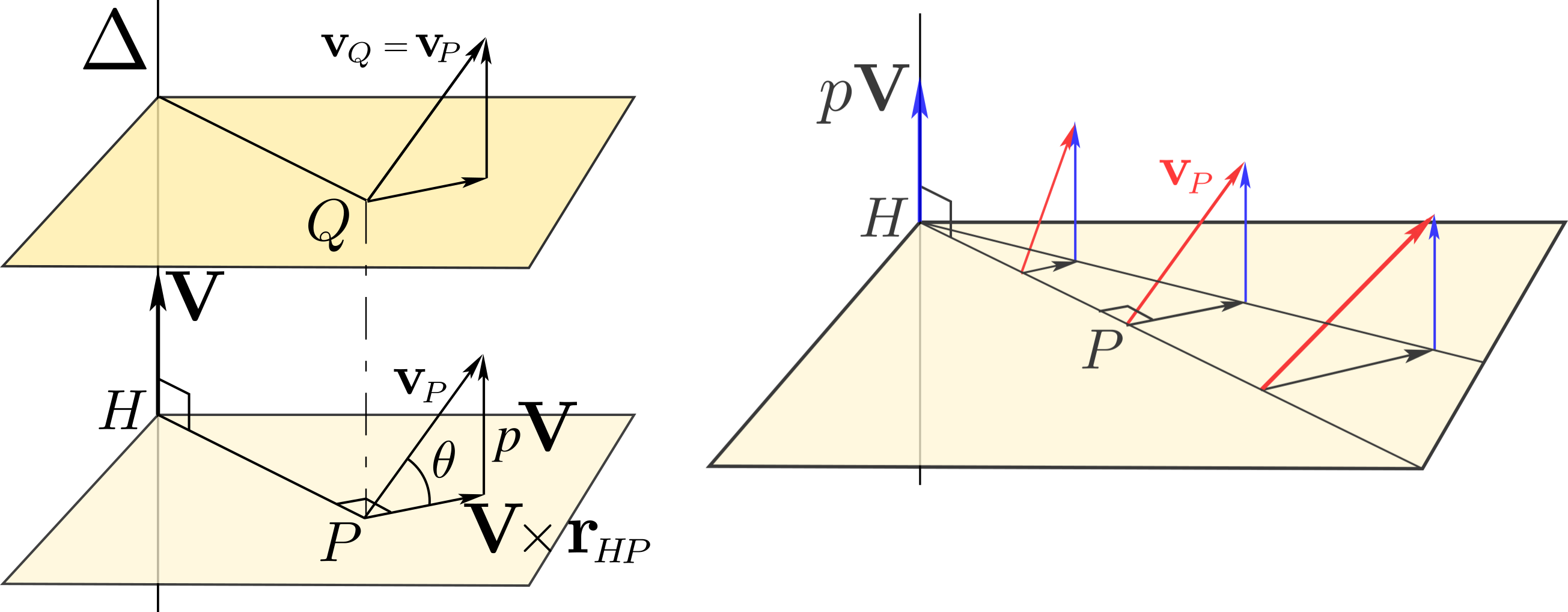
Figure4.6.3.
The screw axis possesses fundamental properties listed below.
Corollary4.6.4.Properties of the screw axis.
Moments are invariant along axis \(\Delta\text{:}\) for all \(Q\) of \(\Delta\text{,}\)\(\bvv_Q = p \bV\) (recall that the pitch \(p\) is an invariant).
The notion of axis is an extension to that defined for sliders: in the case of sliders, the pitch is zero, and hence \(\bvv_Q = \bze\) for all points of the axis of a slider.
The moment about a point \(P\) off the axis can be determined from the value of the moment taken on the axis: denoting by \(H\) the projection of \(P\) on axis \(\Delta\text{,}\) we have (see Figure 4.6.3)
which shows that the moment about \(P\) can be expressed as the sum of two orthogonal vectors, the first being independent of \(P\text{,}\) the second being proportional to the distance from \(P\) to axis \(\Delta\text{.}\)
The magnitude of moments take its minimum value on the axis of the screw. As the point \(P\) moves farther away from the axis \(\Delta\text{,}\) the angle \(\theta\) made by \(\bvv_P\) and the plane passing through \(P\) and orthogonal to \(\Delta\) tends to zero as the distance \(r =|PH| \to \infty\)
Hence, for points far away from \(\Delta\text{,}\) the screw behaves like a slider of axis \(\Delta\text{.}\)
According to equation (4.6.6) any screw \(\{ \cV \}\) of resultant \(\bV\neq 0\) and axis \(\Delta\) can be decomposed as the sum of a slider \(\{ \cS \}\) of axis \(\Delta\) and a couple \(\{ \cC \}\) whose moment is collinear to \(\Delta\) in the following way
where \(p\) and \(\Delta (Q^*, \bV)\) are the pitch and the axis of \(\{ \cV \}\text{,}\) respectively. This decomposition is unique.
In conclusion, the knowledge of the pitch \(p\) and the axis \(\Delta (Q^*, \bV)\) entirely defines a screw \(\{\cV\}\text{:}\) the decomposition of \(\{\cV\}\) according to (4.6.7) is unique. See Figure 4.6.3 for a graphical representation of \(\{\cV\}\) in relation to its axis.
Example4.6.5.
Consider the screw \(\{\cV\}\) defined as the sum of the two sliders \(\{ \cS_1 \}\) and \(\{ \cS_2 \}\) of axes \((A_1, \bS_1= \be_1)\) and \((A_2, \bS_2=\be_2)\text{,}\) respectively, where points \(A_1\) and \(A_2\) are defined by \(\br_{OA_1}= \be_3\) and \(\br_{OA_2}= -\be_3\text{.}\)
Find the axis of \(\{\cV\}\) and the corresponding decomposition (4.6.7). Then find the set of points for which \(|\bvv_P|=\)constant.
Solution.
It is readily seen that \(\{\cV\}\) is not a slider since the axes of \(\{ \cS_1 \}\) and \(\{ \cS_2 \}\) are neither parallel nor intersecting. First we express \(\{\cV\}\) in the form
We find the pitch of \(\{\cV\}\) as \(p = \bV\cdot\bvv_O /\bV^2 = 1\text{.}\) The axis \(\Delta\) of \(\{\cV\}\) is directed along \(\bV = \be_1 + \be_2\) and passes through the point \(B\) given by
Hence the axis passes through \(O\text{,}\) which is expected since \(\bvv_O = p \bV\text{:}\)\(\Delta = (O,\bV)\text{.}\) According to (4.6.7) we can write the decomposition
where \(H\) is the projection of \(P\) onto axis \(\Delta\text{.}\) It is seen that \(|\bvv_P| =\)constant for all points equidistant from \(\Delta\text{.}\) The sets for which \(|\bvv_P| =\)constant are cylinders of axis \(\Delta\text{.}\)
Example4.6.6.
Consider the screw \(\{\cV\}\) of resultant \(\bV = \be_1 + \be_2 +\be_3\text{,}\) of pitch \(p=1\text{,}\) and whose axis passes through point \(A\) with \(\br_{OA}= \be_1\text{.}\)
Find the expression of \(\{\cV\}\) resolved at point \(O\text{.}\)
Solution.
The value of \(\bvv_A\) is given by \(p\bV\) since point \(A\) is on axis. This gives
Given two distinct points \(A\) and \(B\text{,}\) consider the vector field \({\bf v}_P = \br_{AP}\times \br_{BP}\text{.}\) Show that this field is equiprojective, and hence defines a screw.
Find its resultant and its axis.
Solution.
We have to show that \(\bvv_P \cdot \br_{PQ} = \bvv_Q \cdot \br_{PQ}\) for any two points \(P\) and \(Q\text{:}\)
Using the identity \((\bA\times\bB)\cdot \bA = \bze\text{,}\) we find that the last expression gives \(\bvv_Q \cdot \br_{PQ}\text{.}\) To find the corresponding resultant, we first note that \(\bvv_A =\bze\text{.}\) Hence, we need to find a vector \(\bV\) independent of \(P\) such that \(\bvv_P = \bV \times \br_{AP}\text{:}\) we find