To find the equivalent angle/axis of a rotation \(\cR\text{,}\) we find the vectors which are invariant by the rotation, that is, satisfying \(\cR(\bV) = \bV\text{.}\) If this set is of dimension 1, we can identify one of two possible unit vectors \(\pm \bu\text{:}\) this gives the equivalent axis. To find the equivalent angle \(\al\text{,}\) we use \(2\cos\al + 1 = \text{trace}(\cR)\) (the so-called trace of \(\cR\)). To find angle \(\al\) uniquely, corresponding to the chosen \(\bu\text{,}\) we use
This represents a 1-dimensional subspace of \(\mathbb{R}^3\) spanned by unit vector \(\bu = (\be_1 + \be_2 + \be_3)/\sqrt{3}\text{.}\) Choosing the unit vector \(\bv = (\be_1 - \be_2)/\sqrt{2}\) (which is normal to \(\bu\)) we find
giving the unique angle \(\alpha = \frac{2\pi}{3}\) in interval \([0, 2\pi) \text{.}\)
Case 2: The matrix is a rotation. Solving \(\cR(\bV) = \bV\) gives \(\bu = (3\be_1 + 4 \be_2)/5\text{.}\) Choose \(\bv = \be_3\) and find \(\cos\al = 0\) and \(\sin \al =-1\text{:}\)\(\al = 3\pi/2\text{.}\)
Case 3: Proceed as in previous cases to find \(\cR = \cR_{\al, \bu}\) with \(\al = \pi \) and \(\bu = (\be_1 + \be_2 + \be_3)/ \sqrt{3}\text{.}\)
\(\blacksquare\)
4.
Given three real scalars \(a\text{,}\)\(b\text{,}\) and \(c\text{,}\) consider the following matrix
\begin{equation*}
[A]_E =
\begin{pmatrix}
a \amp b \amp c \\
c \amp a \amp b \\
b \amp c \amp a \\
\end{pmatrix}
\end{equation*}
Show that \([A]_E\) is a rotation matrix if and only if \(a\text{,}\)\(b\) and \(c\) are the roots of the polynomial \(p(x)= x^3 - x^2 +k\text{,}\) with \(0 \leq k \leq 4/27\text{.}\)
Describe the axis of this rotation.
Solution.
On the basis \((\be_1 , \be_2 , \be_3)\text{,}\) the three column vectors of matrix \([A]_E\) are
\begin{gather*}
\bc_1 = a\be_1 + c \be_2 + b \be_3\\
\bc_2 = b\be_1 + a \be_2 + c \be_3\\
\bc_3 = c\be_1 + b \be_2 + a \be_3
\end{gather*}
We need to impose that these 3 vectors have magnitude 1 and are mutually perpendicular: this yields 2 equations
where \(k= -abc\) is a real parameter. Not any value of \(k\) is acceptable since \(P(x)\) must have 3 real roots (possibly multiple). By finding \(P'(x) = 3x^2 -2x\) we find that \(P\) has a maximum at \(x=0\) and a minimum at \(x=2/3\text{.}\) For 3 real roots to occur, we need to impose \(P(0)=k \geq 0\) and \(P(2/3)= k- 4/27 \leq 0\text{.}\) This gives the necessary and sufficient condition
\begin{equation*}
\boxed{0 \leq k \leq 4/27}\text{.}
\end{equation*}
To find the axis, we solve \(\cR (\bV) = \bV\) which gives the equations
\begin{gather*}
(a-1)x_1 + b x_2 + c x_3 = 0\\
c x_1 + (a-1) x_2 + b x_3 =0\\
bx_1 + cx_2 + (a-1) x_3 = 0
\end{gather*}
which gives \(x_1 = x_2\) if \(b^2+c^2 +bc \neq 0\text{.}\) Likewise we obtain \(x_2=x_3\text{.}\)We conclude that the axis of \(\cR\) is directed along \(\bu = (\be_1 + \be_2 + \be_3)/\sqrt{3}\text{.}\)
To find the angle we use \(2 \cos\al +1 = \text{trace}(\cR) = 3a\text{.}\) We use unit vector \(\bv = (\be_1 - \be_2)/\sqrt{2}\) we find
Example 2: choose \(a=-1\text{,}\)\(b=c=2\text{.}\) Again conditions [4-5] are satisfied and we find \(\al=\pi\text{.}\)
\(\blacksquare\)
5.
Consider the equivalent rotation \(\cR_{\al,\bu}\) corresponding to rotation \(\cR_{BE}\) which maps a basis of \(\cE\) to a basis of \(\cB\text{.}\) When the equivalent angle \(\alpha\) is close to \(\pi\text{,}\) show that the equations
can be used to determine \(\bu =u_1\be_1 + u_2 \be_2 + u_3 \be_3\text{,}\) with \(c_{ij}= \be_i\cdot \bhb_j\text{.}\)
6.
Consider the equivalent rotation \(\cR_{\al,\bu}\) which maps basis \((\be_1,\be_2,\be_3)\) of \(\cE\) to basis \((\bhb_1 ,\bhb_2 ,\bhb_3)\) of body \(\cB\text{.}\) Let \((\bha_1, \bha_2, \bha_3)\) be an auxiliary basis.
Show that the skew-symmetric operator \(\cU: \; \bV \mapsto \bu\times \bV\) satisfies
Find the mapping of \(\bV =x \be_1+y\be_2 +z\be_3\) by the rotation of angle \(\al =2\pi/3\) about \((\be_1+\be_2+\be_3)\text{.}\) Describe the mapping of the unit cube by this rotation.
given 3 vectors \(\bU, \bV\) and \(\bW\) by a quaternion calculus.
9.
Consider the quaternion \(Q= \frac{1}{2} +\frac{1}{2}\be_1 +\frac{1}{2} \be_2 +\frac{1}{2} \be_3\text{.}\)
Find \(Q+\conjQ\) and \(Q\conjQ\text{:}\) deduce \(Q^2\text{.}\)
Find \(Q^2 -Q+1\text{:}\) deduce \(Q^3\text{.}\)
10.
Given two real numbers \(q_0\) and \(q_1\text{,}\)
find the quaternions \(Q\) which satisfy \(Q \be_1 = \be_1 (q_0+ q_1 \be_1)\text{.}\) Deduce the value of \(Q_\te \be_1 \conjQ_\te\) for \(Q_\te = \cos\frac{\te}{2} + \be_1 \sin\frac{\te}{2}\text{.}\)
find the quaternions \(Q\) which satisfy \(Q \be_2 = \be_2 (q_0+ q_1 \be_1)\text{.}\) Deduce the value of \(Q_\te \be_2 \conjQ_\te\) for \(Q_\te = \cos\frac{\te}{2} + \be_1 \sin\frac{\te}{2}\text{.}\)
11.
Show that the multiplication of quaternions is associative, that is, \(Q_1 (Q_2 Q_3) = (Q_1 Q_2) Q_3\) for any three quaternions \(Q_1\text{,}\)\(Q_2\) and \(Q_3\text{.}\)
12.
Find the quaternions \(Q\) which satisfy \(QQ_0 = Q_0 Q\) for all \(Q_0 \in \mathbb{H}\text{.}\)
13.
We define quaternion \(e^{Q}\) as the formal expansion \(1+ Q + \tfrac{1}{2} Q^2 + \cdots+ \frac{Q^n}{n!} + \cdots\text{.}\) Given a pure unit quaternion \(0+\bu\) and a real number \(\te\text{,}\) show that
Conclude that any unit quaternion can be put in the form \(e^{\te \bu}\text{.}\) Is \(e^{\te \bu} e^{\phi \bv}\) equal to \(e^{\te\bu+\phi\bv}\text{?}\)
Solution.
To show that \(e^{\te \bu} = \cos\te + \sin\te \bu\) we need to find the powers of quaternion \(0+\bu\text{:}\)
To show whether \(e^{\te \bu} e^{\phi \bv}\) is equal to \(e^{\te \bu + \phi \bv}\text{,}\) we could
find out if these 2 quaternions agree at all orders of \(\te\) and \(\phi\) (they are not equal at order 2),
consider the particular case \(\te=\phi\) and \(\bu= \bv\) and show that the corresponding quaternions are not equal,
or simply realize that \(e^{\te \bu} e^{\phi \bv} \neq e^{\phi \bv} e^{\te \bu}\text{,}\) in contradiction with \(e^{\te \bu + \phi \bv} = e^{\phi \bv+ \te \bu}\text{.}\)
We conclude that \(e^{\te \bu} e^{\phi \bv}\) is not equal to \(e^{\te \bu + \phi \bv}\text{.}\)
14.
Show that the set \(S^3\) of unit quaternions forms a group under the multiplication rule, that is,
if \(P, Q \in S^3\text{,}\) then \(PQ \in S^3\) (closure),
for all \(P,Q,R \in S^3\text{,}\)\(P (QR)= (PQ)R\) (associativity),
\(1 \in S^3\) and for all \(Q \in S^3\text{,}\)\(1Q= Q1\) (identity element),
For each \(Q \in S^3\) there exists \(Q^{-1} \in S^3\) such that \(Q Q^{-1} = Q^{-1} Q = 1\) (inverse).
15.
Show that for all non-zero quaternion \(Q\) there exist a unique a positive real number \(\la\) and a unique unit quaternion \(R\) such that \(Q= \la R\text{.}\)
16.
Given two quaternions \(Q= q_0 + \bq\) and \(Q'=q'_0 + \bq'\text{,}\) consider the bilinear form \(\langle Q, Q' \rangle = q_0 q_0' + \bq\cdot \bq'\text{.}\)
Show that \(\langle . , . \rangle\) defines a scalar product in \(\mathbb{H}\text{.}\)
Given two quaternions \(Q\) and \(R\text{,}\) show that the following three statements are equivalent:
(i) \(Q\) and \(R\) are orthogonal, that is, \(\langle Q, R \rangle = 0\)
(ii) \(Q\bar{R}\) is a pure quaternion,
(iii) \(Q\bar{R} + R\bar{Q}= 0\text{.}\)
17.
In referential \(\cE (O,\be_1, \be_2,\be_3)\text{,}\) consider the rotations \(\cR_{\al,\be_1}\text{,}\)\(\cR_{\beta,\be_2}\) and \(\cR_{\ga,\be_3}\text{.}\)
Find the equivalent angle and axis of rotation \(\cR_{\al,\be_1} \circ \cR_{\beta,\be_2}\text{.}\)
Find the quaternion associated with rotation \(\cR_{\al,\be_1} \circ \cR_{\beta,\be_2} \circ \cR_{\ga,\be_3}\text{.}\)
18.
Let \(Q = q_0 + q_1 \be_1 +q_2 \be_2 + q_3 \be_3\) be a quaternion. Define the 4x4 matrix \([\cM]\) as follows
Show that \(Q=1\) corresponds to the diagonal matrix \([\cM] = \text{diag}(1,1,1,1)\text{.}\)
Show that the conjugate \(\conjQ\) of \(Q\) corresponds to \([\cM]^T\text{,}\) and that the inverse \(Q^{-1}\) of \(Q\) corresponds to \([\cM]^{-1}= \frac{1}{|Q|^2}[\cM]^T\text{.}\)
Show that if \(Q\) is a unit quaternion, then \([\cM]^{-1} = [\cM]^T\text{.}\)
Show that if \(Q_3 = Q_1 Q_2\) corresponds to \([\cM_3]= [\cM_1][\cM_2]\text{.}\)
Solution.
Let \(Q = q_0 + q_1 \be_1 +q_2 \be_2 + q_3 \be_3\) be a quaternion. Define the 4x4 matrix \([\cM]\) as follows
\(Q=1\) corresponds to the identity matrix \(M_{ij}= \delta_{ij}\text{.}\)
The conjugate \(\conjQ\) of \(Q\) is the quaternion \(q_0 - q_1 \be_1 -q_2 \be_2 - q_3 \be_3\) and it corresponds to the transpose of \([\cM]\text{.}\)
Show that it is not possible to find a displacement of the unit sphere which keeps its center fixed and displaces every point of its surface.
23.
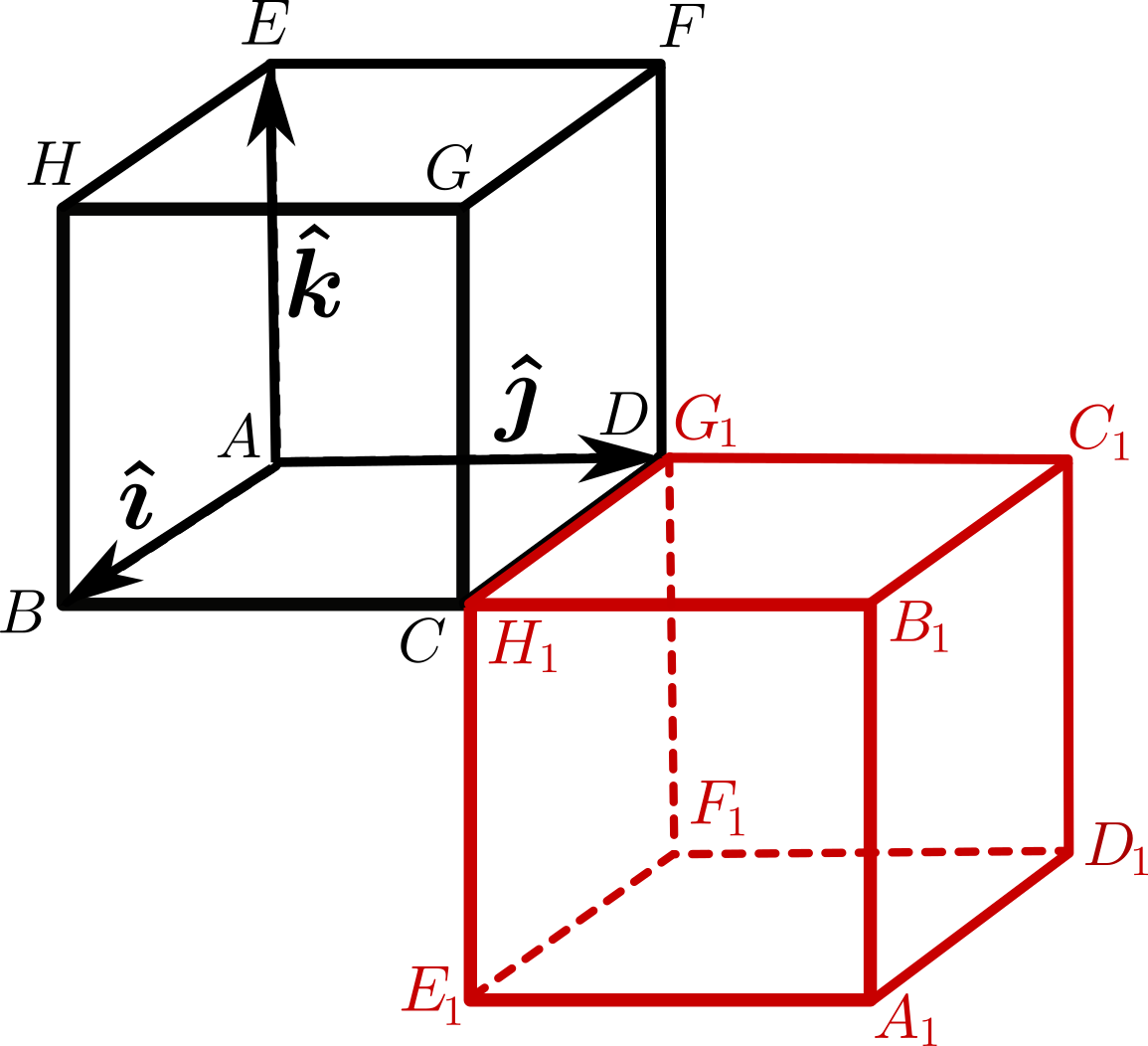
Figure 1.8.1 shows two configurations of a rigid body in the shape of a unit cube, where \(A\) is mapped into \(A_1\text{,}\)\(B\) into \(B_1\text{,}\) etc. Consider the rotation which maps basis \((\bi,\bj,\bk)\) into \((\bi_1,\bj_1,\bk_1)\text{.}\)
Find its matrix representation on basis \((\bi,\bj,\bk)\text{,}\) then on basis \((\bi_1,\bj_1,\bk_1)\text{.}\)
Find its equivalent representation \(\cR_{\alpha, \bu}\) and the corresponding unit quaternion.
Find the screw parameters (screw axis, angle and pitch) of the displacement which takes the body from the initial configuration to its final configuration.