We wish here to generalize the notion of frictionless joint introduced in Section 10.4. Recall that frictionless joints interconnecting rigid bodies are defined by assuming that the local contact force is normal to the coinciding surfaces (or lines) in direct contact. We can enlarge this family of joints by including interconnections which do not necessitate direct contact but rather involve intermediary mechanisms of negligible mass, such as ball bearings, lubricating fluid, etc. After all, true technological joints are not conceived by direct physical contact of rigid bodies. This enlarged family will be called ideal joints and is defined as follows.
Definition12.5.1.Ideal joint.
A joint between two rigid bodies \(\cB_1\) and \(\cB_2\) is said to be ideal} if the corresponding contact action screw \(\{ \cA_{\cB_1 \rightarrow \cB_2}^c \}\) satisfies
for all possible relative motions between \(\cB_1\) and \(\cB_2\) allowed by the joint.
This definition is independent of the eventual interconnections which may exist between \(\cB_1\) or \(\cB_2\) and other rigid bodies. Indeed, since the power of interaction \(\Pow^c_{\cB_1 \leftrightarrow \cB_2}\) only involves the kinematics of \(\cB_2\) relative to \(\cB_1\) (or vice versa), the motion of \(\cB_1\) and \(\cB_2\) relative to some referential \(\cE\) is irrelevant in equation (12.5.1).
Remark12.5.2.
If the joint allows a mobility of size \(M\) defined by \(M\) independent coordinates \((q_1, q_2, \ldots , q_M)\text{,}\) equation (12.5.1) leads to \(M\) scalar relationships: we may write the kinematic screw \(\{ \cV_{2/1} \}\) as
assuming without loss of generality a surface of contact between \(\cB_1\) and \(\cB_2\text{.}\) Recall that the local contact force \(\bof^c_{1\to 2} (Q)\) is directed along the unit normal vector \({\bn}_{12}(Q)\) to the surface of contact, and that the slip velocity \(\vel_{Q \in 2/1}\) is always perpendicular to \({\bn}_{12}(Q)\text{:}\) for all \(Q \in {\partial \cB_1 \cap \partial \cB_2}\) we have \(\bof^c_{1\to 2} (Q) \cdot \vel_{Q \in 2/1}
=0\text{.}\) Therefore, \(\Pow^c_{\cB_1 \leftrightarrow \cB_2} = 0\text{.}\) Hence, frictionless joints are ideal joint. However, it is important to realize that ideal joints are not necessarily realized by direct frictionless contact.
Remark12.5.4.
The notion of ideal joints allows the designer to resolve the indeterminations which inevitably arise whenever rigid bodies are interconnected. It also leads to the determination of contact action screw \(\{ \cA_{\cB_1 \rightarrow \cB_2}^c \}\) without specifying the technological solution of a physical realization of the joint between \(\cB_1\) and \(\cB_2\text{.}\)
Example12.5.5.
Derive the condition that must be satisfied by the action screw \(\{ \cA^c_{1 \rightarrow 2} \}\) for two rigid bodies connected by an ideal helical joint.
Figure12.5.6.
Solution.
Denote by \((O_2,\bz_1)\) the axis which define the helical joint. Recall that the corresponding kinematic screw takes the following form
for any point \(A\) of axis \((O_2, \bz_1)\text{.}\) This is the same condition that we stated without proof in Section 10.4.
Example12.5.7.
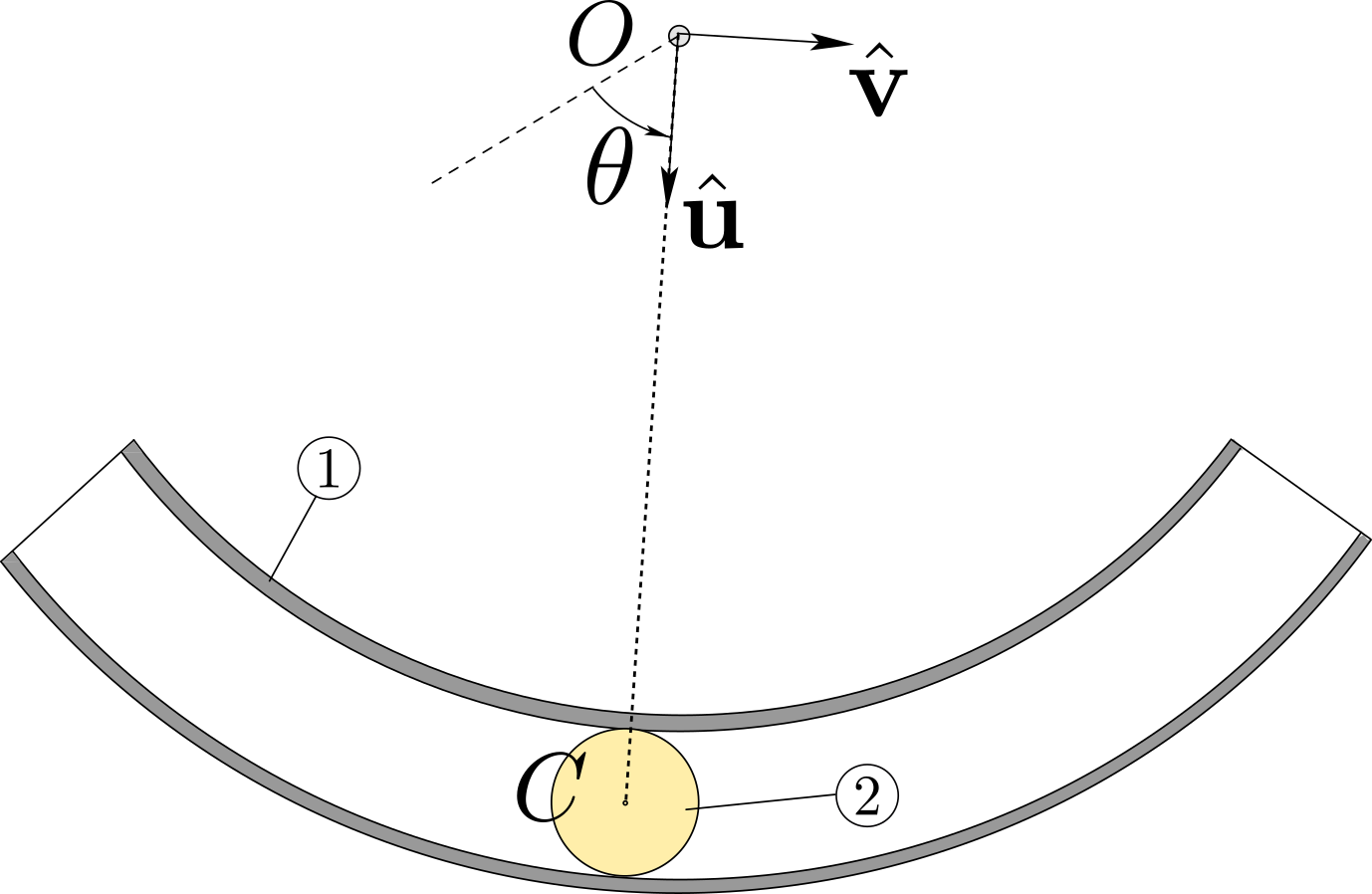
Derive the condition that must be satisfied by the action screw \(\{ \cA_{1 \rightarrow 2}^c \}\) corresponding to the frictionless contact between a sphere and the interior of a toroidal surface. See Figure 12.5.8.
Figure12.5.8.
Solution.
Denote by \(C\) the center of the sphere 2=, and by \(O\) the center of the torus 1=. Then the kinematic screw of 2= relative to 1= takes the following form