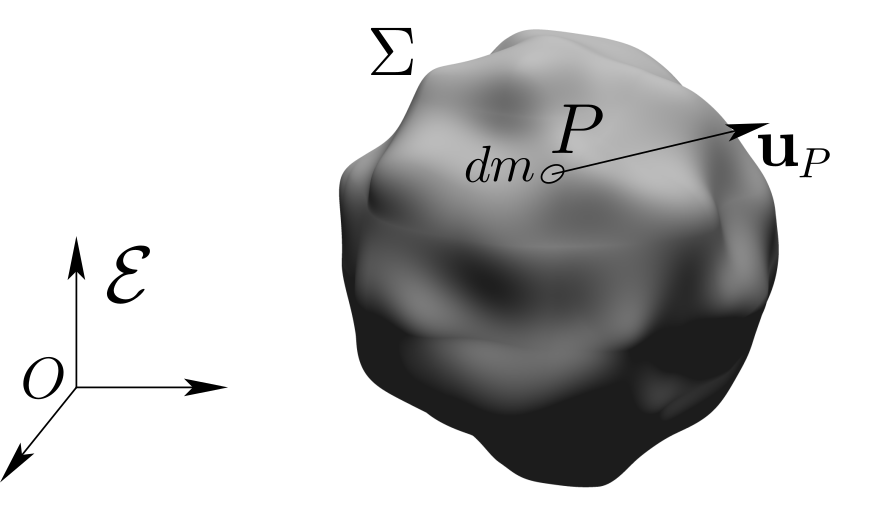
A material system \(\Si\) is a continuum for which a positive measure \(m\text{,}\) called mass measure (or mass distribution), can be defined at all points \(P\) of \(\Si\text{.}\) It quantifies matter within \(\Si\) in a macroscopic manner. It is assumed regular, so that there exists a function \(\rho(P)\text{,}\) called mass density, such that \(dm = \rho (P) dV\) for all elementary volume \(dV\) of \(\Si\text{.}\) Furthermore, the mass of system \(\Si\) is assumed conserved, that is, for any subset \(\sigma\) of \(\Si\text{,}\)
If the material system \(\Si\) can be approximated as a surface, we can define a surface mass density \(\si (P)\) such that the elementary mass of an element \(dA\) is given by \(dm = \si (P) dA\text{.}\) Likewise, the elementary mass of an element of length \(dl\) at a point \(P\) is given by \(dm = \la (P) dl)\text{,}\) where \(\la (P)\) is the linear mass density of a body approximated as a 1-dimensional object.
It is also possible to define a mass concentrated at a point \(Q\) of \(\cE\) by the relationship \(dm = m_Q \delta (Q) dV\) where \(\delta (Q)\) is the Dirac function based at \(Q\text{.}\)
Figure9.1.2.
A consequence of mass conservation is the following result, which will often be used.
Corollary9.1.3.
Given a material system \(\Si\) in motion relative to referential \(\cE\text{,}\) then, for any vector field \(P \in \Si \mapsto {\bf u}_P\text{,}\) we have
We use Reynolds transport theorem for the material time derivative of integrals over a time-varying material volume \(\Si\) bounded by the surface \(\partial\Si\text{:}\)
\begin{equation*}
\frac{d}{dt} \int_\Si h \rho dV = \int_\Si \frac{\partial}{\partial t}(\rho h) dV + \int_{\partial\Si} \rho h \vel_P \cdot \bn dA
\end{equation*}
where \(h\) is a scalar field defined on \(\Si\text{,}\)\(\vel_P \equiv \vel_{P/\cE}\) is the velocity of material points of \(\Si\) and \(\bn\) is the outward unit normal to \(\partial\Si\text{.}\) Upon using the divergence theorem, we find
\begin{align*}
\frac{d}{dt} \int_\Si h \rho dV \amp = \int_\Si [\frac{\partial}{\partial t}(\rho h) + \grad\cdot (\rho h\vel_P)] dV\\
\amp =\int_\Si [\frac{\partial h}{\partial t} + \vel_P \cdot \grad h] dm +
\int_\Si h [\frac{\partial\rho}{\partial t} + \grad \cdot (\rho \vel_P)] dV
\end{align*}
In the last equation, the expression \(\frac{\partial h}{\partial t} + \vel_P \cdot \grad h\) is the total time derivative of \(h\text{.}\) Furthermore, the quantity \(\frac{\partial\rho}{\partial t} + \grad \cdot (\rho \vel_P)\) vanishes as a consequence of mass conservation (this is known as the continuity equation). Finally, we obtain
\begin{equation*}
\frac{d}{dt} \int_\Si h dm = \int_\Si \frac{dh}{dt} dm
\end{equation*}
This result can then be generalized to vector fields.
Next, we introduce the notion of mass center.
Definition9.1.4.Mass center.
The mass center\(G\) of material system \(\Si\) is the unique point satisfying
where \(Q\) is an arbitrary point and \(m\) is the total mass of \(\Si\text{.}\)
If the material system \(\Si\) is assumed homogeneous, that is, if its mass density \(\rho\) is uniform, then its mass center \(G\) coincides with the centroid of the geometric figure occupied by \(\Si\) and its position is often available in tables for commonly found shapes.
If a system \(\Si\) of mass \(m\) can be regarded as composed of \(N\) disjoint parts \(\Si_{1}\text{,}\)\(\ldots\text{,}\)\(\Si_{N}\text{,}\) of known mass \(m_i\) and mass center \(G_{i}\) (\(i=1,\ldots, N\)), then the mass center of \(\Si\) coincides with the mass center of the system of particles \(\{ G_{1} , \ldots ,
G_{N} \}\) of mass \(m_1\text{,}\)\(\ldots\text{,}\)\(m_N\) respectively:
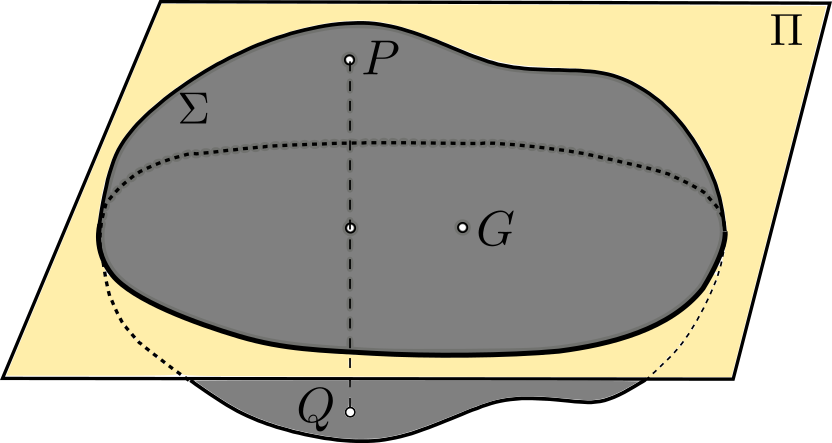
Also note that if \(\Si\) possesses a plane \(\Pi\) of material symmetry, that is, the mass distribution satisfies \(\rho(Q) = \rho(P)\) for \(Q = {\rm Sym}_\Pi (P)\) obtained by symmetry with respect to \(\Pi\text{,}\) then the mass center \(G\) must belong to \(\Pi\text{.}\) See Figure 9.1.6.
Figure9.1.6.
Finally, the following theorem can be useful to determine the location of the mass center of body.
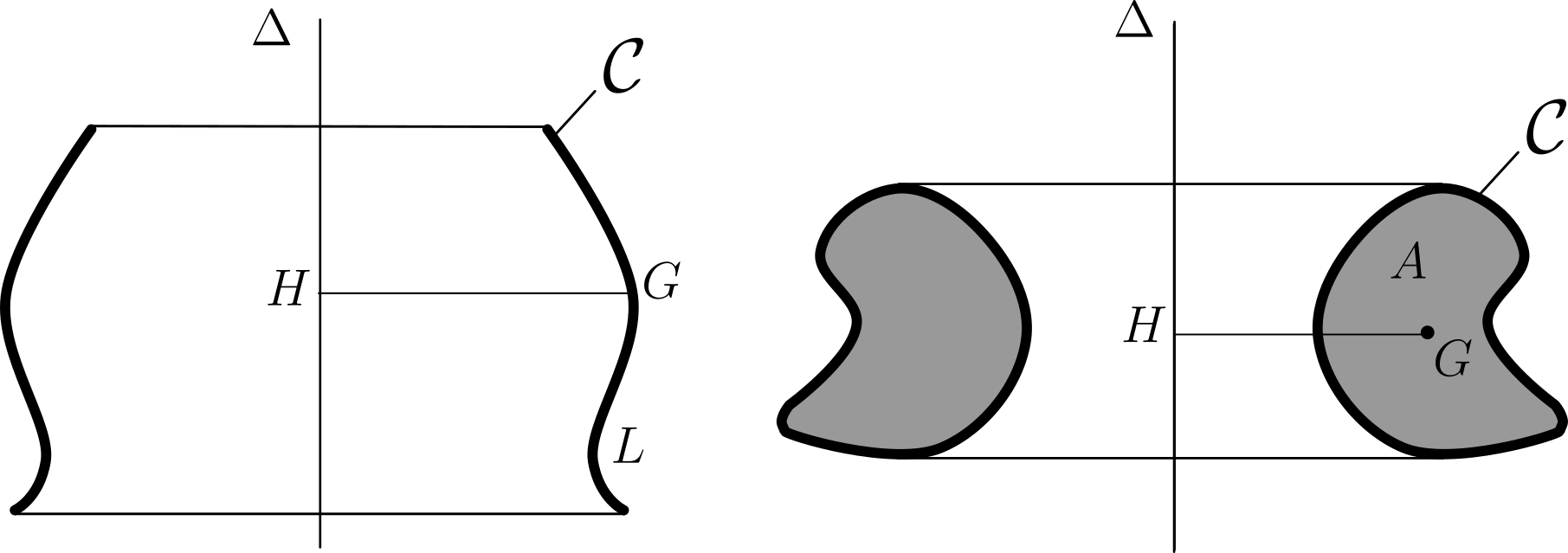
Theorem9.1.7.Pappus’ Centroid Theorems.
First Theorem: If a planar curve \(\cC\) of mass center \(G\) and of length \(L\) is rotated about an axis \(\Delta\) which does not intersect \(\cC\text{,}\) then the area \(A\) of the generated surface is given by \(A = 2\pi L\, |GH|\text{,}\) where \(H\) is the projection of \(G\) on \(\Delta\text{.}\) See Figure 9.1.8 (left).
Second Theorem: If a plane figure of mass center \(G\) and area \(A\) is rotated about an axis \(\Delta\) then the volume \(V\) of the generated solid body is equal to the product of area \(A\) with the distance traveled by \(G\text{:}\)\(V = 2\pi A\, |GH| \text{.}\) See Figure 9.1.8 (right).