We denote by \(\Si\) a material system (not necessarily a rigid body), by \(\bSi\) the exterior} to \(\Si\text{,}\) and by \(\pSi\) the boundary of \(\Si\text{.}\) We classify the mechanical actions exerted on \(\Sigma\) as follows. First, we differentiate the internal actions from the external actions exerted on \(\Si\text{.}\) The mathematical modeling of internal actions is left to a continuum mechanics course. More importantly, their contribution will vanish in the principles and theorems pertaining to the dynamics of systems of rigid bodies. We then classify the external actions exerted on \(\Si\) into two groups: actions at-a-distance versus contact actions. For each type we find that these actions can be modeled mathematically in terms of a screw, called action screw.
Subsection10.1.1Internal versus External Forces
Given a material system \(\Si\text{,}\) we distinguish between actions which emanate from the exterior \(\bSi\) of \(\Si\) from those which originate from the interior of \(\Si\text{.}\) The latter can be viewed as actions exerted on arbitrary subdomains \(\si\) of \(\Si\) to the interior domain \(\Si \setminus \si\text{.}\) By consideration of all possible domains \(\si\text{,}\) it is known in continuum mechanics that these interior actions can be modeled by a second-order tensor, known as the stress tensor. As will be seen in Chapter 11, the contribution of internal actions need not be considered in the realm of rigid body mechanics. Note that, if a material system \(\Sigma\) is defined as the ensemble \(\{ \cB_1, \cB_2 , \ldots, \cB_N\}\) of \(N\) rigid bodies, actions internal to \(\Sigma\) also involve any interactions between any two bodies of \(\Sigma\) and will need to be taken into account in certain formulations.
Subsection10.1.2External Actions
The external actions exerted on \(\Si\) may be of mechanical, electromagnetic, thermal or chemical origin. We are only concerned with mechanical actions. They can be classified into two groups:
Actions at-a-distance: these actions are transmitted from one continuum to another without the need of physical contact between the two. The physical nature of these actions may be gravitational, electrostatic and electromagnetic. They can be modeled by vector fields, more specifically volumetric force fields: at every point of \(\Si\text{,}\) a local volumetric force can be defined. This rules out the possibility of certain phenomena encountered in some continua which require mechanical actions to be modeled in terms of moments distributed over their domain. Such phenomena are not relevant to rigid body mechanics.
Contact actions: these actions arise whenever a material system \(\Si\) is in direct physical contact with one or more material systems. We assume that contact actions can be defined by surfacic (or lineic in case of line contact) force fields at all points of boundary \(\pSi\text{.}\) Again, we rule out the existence of fields of moments due to contact.
Subsection10.1.3Action-at-a-distance Screw
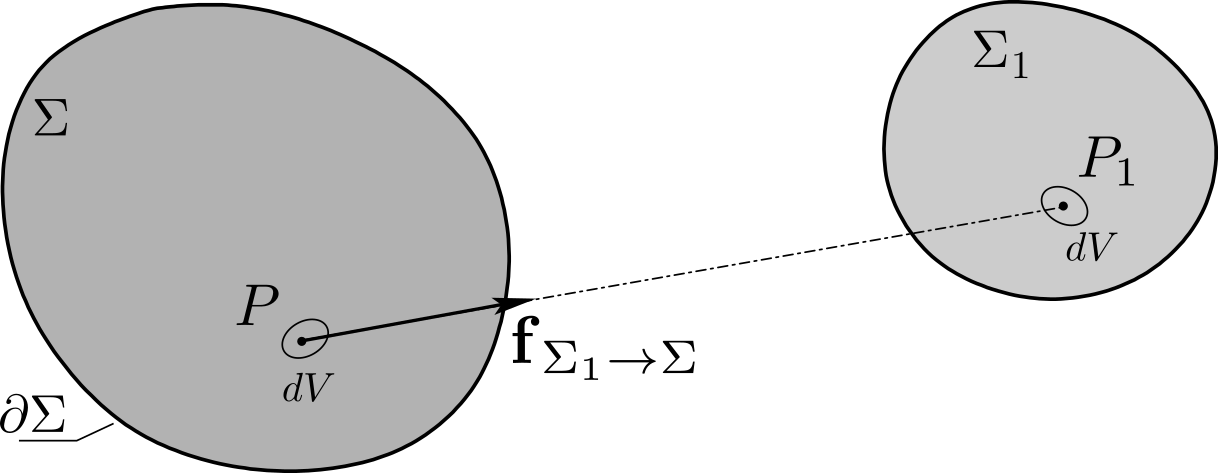
Consider a material system \(\Si_1 \subset \bSi\) which need not be in contact with \(\Si\text{.}\) See Figure 10.1.2. System \(\Si\) is affected by the presence of \(\Si_1\) in the following way: every infinitesimal volume \(dV(P_1)\) located at point \(P_1\) of \(\Si_1\) exerts a force \(\force_{\Si_1 \to \Si} (P_1, P) dV (P_1) dV(P)\) on infinitesimal volume \(dV(P)\) located at point \(P\) of \(\Si\text{.}\) This force is assumed collinear to position vector \(\br_{P_1 P}\text{.}\) The physical origin of this force may be gravitational, electrostatic or electromagnetic. At any point \(P\) of \(\Si\) one can define a volumetric force field which reflects the overall effect of \(\Si_1\) at \(P\)
considered a vector bound at \(P\text{.}\) Hence we model the effect of \(\Si_1\) on \(\Si\) by a field of bound vectors \((P, \bF^v_{\Si_1 \to \Si} (P))\) (or field of sliders in the language of screws). This rules out certain phenomena whereby the effect of \(\Si_1\) on \(\Si\) is only adequately modeled by a field of screws characterized locally by both a volumetric force \(\bF^v_{\Si_1 \to \Si} (P)\) and a volumetric couple \({\bf C}_{\Si_1 \to \Si} (P)\) distributed over \(\Sigma\text{.}\)
We can now define the global effects of the action-at-a-distance forces due \(\Si_1\) on \(\Si\text{.}\)
Definition10.1.1.Action-at-a-distance Screw.
The global effect of action-at-a-distance forces exerted by material system \(\Si_1\) on material system \(\Si\) is modeled by the following screw, called action-at-a-distance screw,
where \(\bF^v_{\Si_1 \to \Si} (P)\) is the volumetric force field due to \(\Si_1\) at a point \(P\) of \(\Si\text{.}\)
Figure10.1.2.
Example 1: Gravitational and Electrostatic Actions. When two masses or two electric charges are placed at two locations \(P_1\) and \(P_2\text{,}\) empirical expressions of the force \(\force_{\Si_1 \to \Si}\) caused by \(P_1\) on \(P_2\) are known, leading to various exact and approximate expressions of the corresponding action screw \(\{ \cA_{\Sigma_1 \to \Sigma_2} \}\) due to gravitational or electrostatic interactions. In the electrostatic case, the expression of so-called Coulomb force precludes motion of the interacting charges, and hence is of little interest in rigid body dynamics. Gravitational interactions are studied in Section 10.2.
Example 2: Inertial Actions. Whenever a particular referential \(\cE\) cannot be adequately assumed Newtonian, the laws of motion relative to \(\cE\) can still be applied by including the effect of inertial forces, the so-called transport and Coriolis forces, which account for the motion of \(\cE\) relative to some Newtonian referential. In such a case, these inertial forces generate two volumetric force fields over a material system \(\Si\) leading to two inertial action screws which will be defined in Chapter 16.
Subsection10.1.4Contact Action Screw
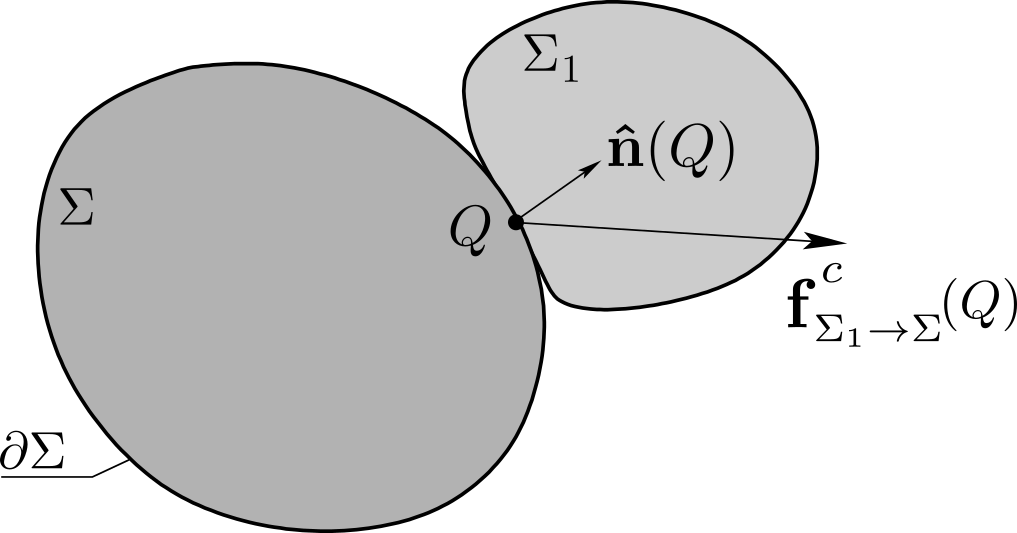
Consider now a material system \(\Si_1 \subset \bSi\) in direct contact with \(\Si\) as shown in Figure 10.1.4. However small the surface of contact, one can model the effect of the contact of \(\Si_1\) on \(\Si\) by a surface force field \(\bof^c_{\Si_1 \to \Si} (Q)\) (a force per unit area) defined at all points \(Q\) of the boundary \(\pSi_1 \cap \pSi\text{.}\) Assuming that unit normal vector \(\bn (Q)\) to surface \(\pSi\) at \(Q\) exists, one can then break up \(\bof_{\Si_1 \to \Si}^c (Q)\) according to
with \(\bT_{\Si_1 \to \Si}^c \cdot \bn = 0\text{.}\) The contributions \(N_{\Si_1 \to \Si}^c\bn\) and \(\bT_{\Si_1 \to \Si}^c\) are called normal surface force density (or contact pressure) and tangential surface force density, respectively.
Definition10.1.3.Action Screw (Contact).
The global effect of contact forces exerted by material system \(\Si_1\) in contact with material system \(\Si\) is modeled by the following screw, called contact action screw and denoted \(\{ \cA^c_{\Si_1 \to \Si} \}\text{:}\)
where \(\bof_{\Si_1 \to \Si}^{\,c} (Q)\) is the local force exerted on infinitesimal element of area \(dA (Q)\) at \(Q\text{.}\)
Figure10.1.4.
Remark10.1.5.
Knowledge of the contact action screw \(\{ \cA^c_{\Si_1 \to \Si} \}\) does not in general imply knowledge of the local force field \(\bof_{\Si_1 \to \Si}^{\,c} (Q)\text{.}\)
Remark10.1.6.
Even in a so-called point-contact between \(\Si_1\) and \(\Si\text{,}\) the contact is actually realized along a small surface. This implies that the contact action screw \(\{ \cA^c_{\Si_1 \to \Si} \}\) is characterized in general by a non-zero moment \(\bM_{I, \Si_1 \to \Si}^c\) at the point of contact \(I\text{.}\) See Section Section 10.3. Nevertheless, many contact actions \(\{ \cA^c_{\Si_1 \to \Si} \}\) are adequately represented by bound vectors \((Q_i, \bR_{\Si_1 \to \Si}^c)\) at discrete points \(Q_i\) of \(\pSi\text{.}\)
Remark10.1.7.
In continuum mechanics, one assumes continuity of stress across the boundary of two material systems in contact. This implies the following condition:
By partitioning the exterior \(\bSi\) of material system \(\Si\) into a finite set of systems \(\{\Si_1 , \Si_2 , \ldots, \Si_N \}\text{,}\) with \(\Si_i \cap \Si_j = \emptyset \) we can define the external action screw exerted on \(\Si\) as