1.
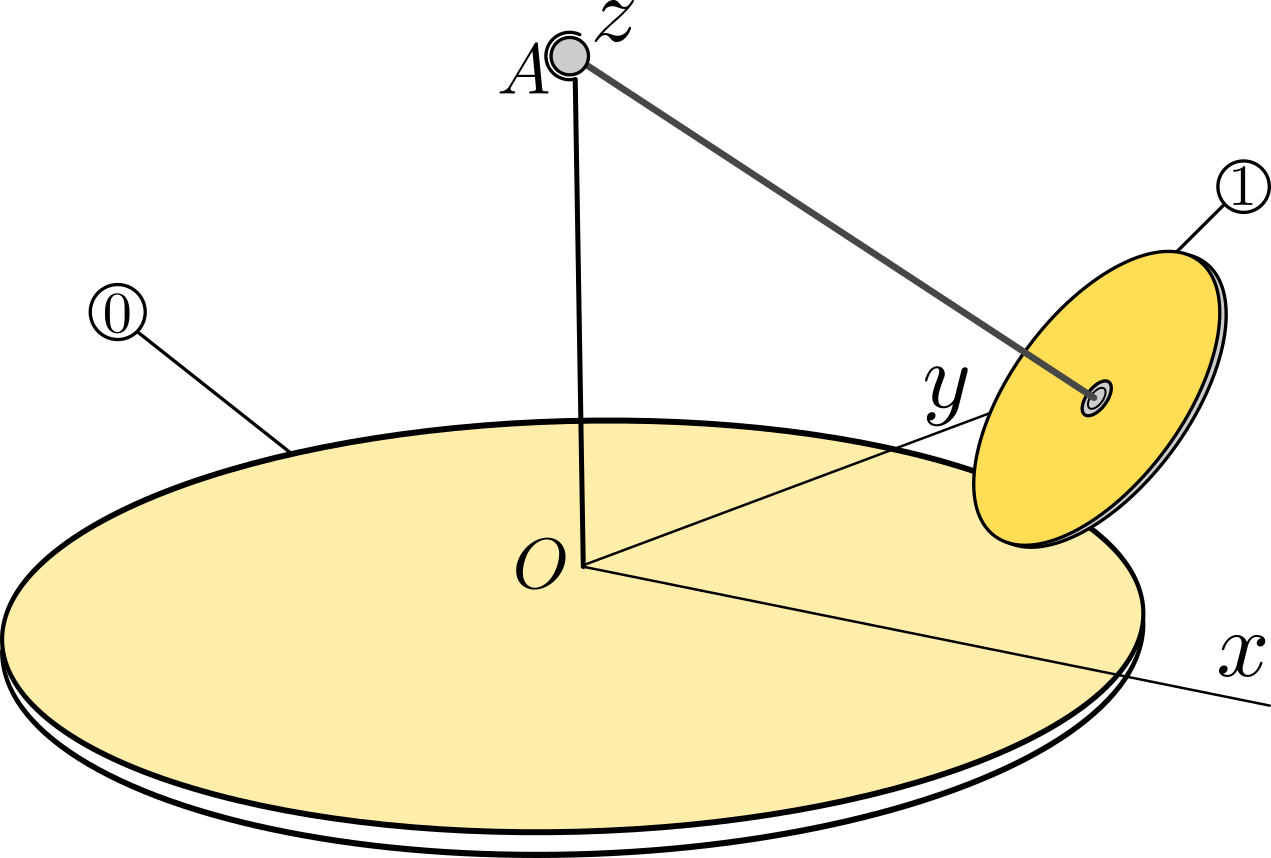
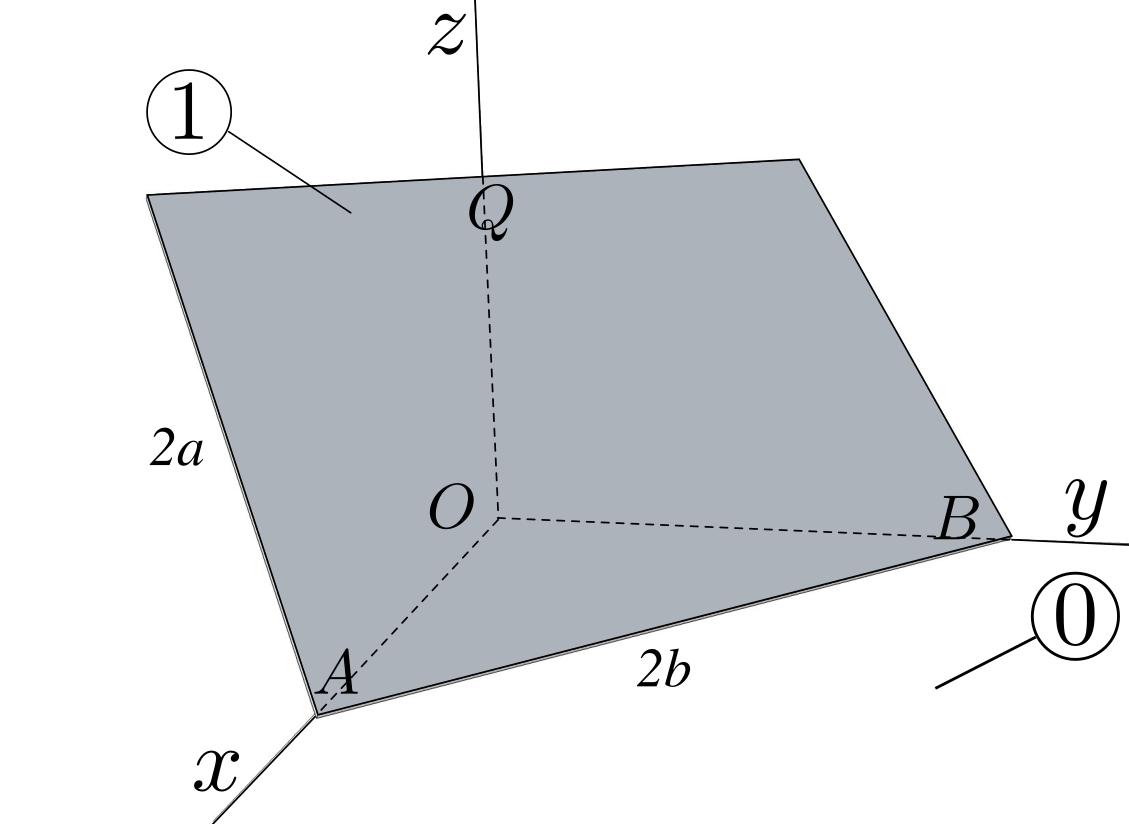
A rectangular plate
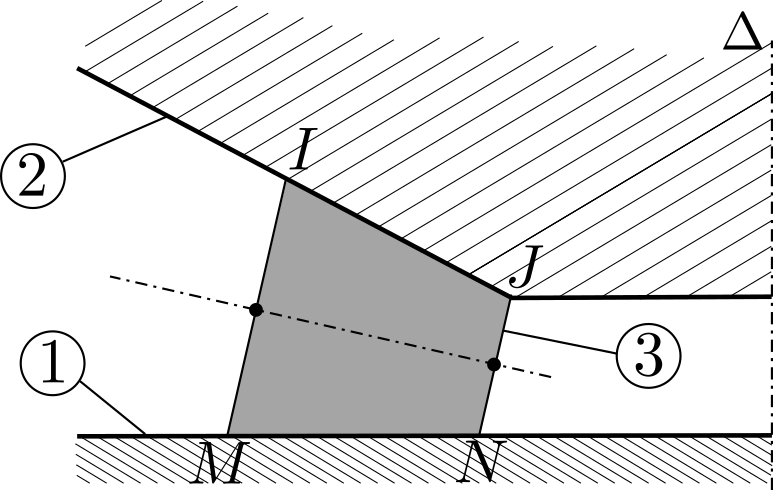
1 of length \(2b\) and width \(2a\) moves relative to a referential 0 with the following constraints:- corner point \(A\) moves along axis \(Ox\text{,}\)
- corner point \(B\) moves along axis \(Oy\text{,}\)
- its upper edge remains in contact with axis \(Oz\) at a point \(Q\text{.}\)
- Find the kinematic screw \(\left\{{\cal V}_ {1/0} \right\}\) resolved at point \(Q\text{.}\) Identify all constraint equations.
- Find the angular acceleration \({\bal}_{1 / 0}\text{.}\)
Solution.
-
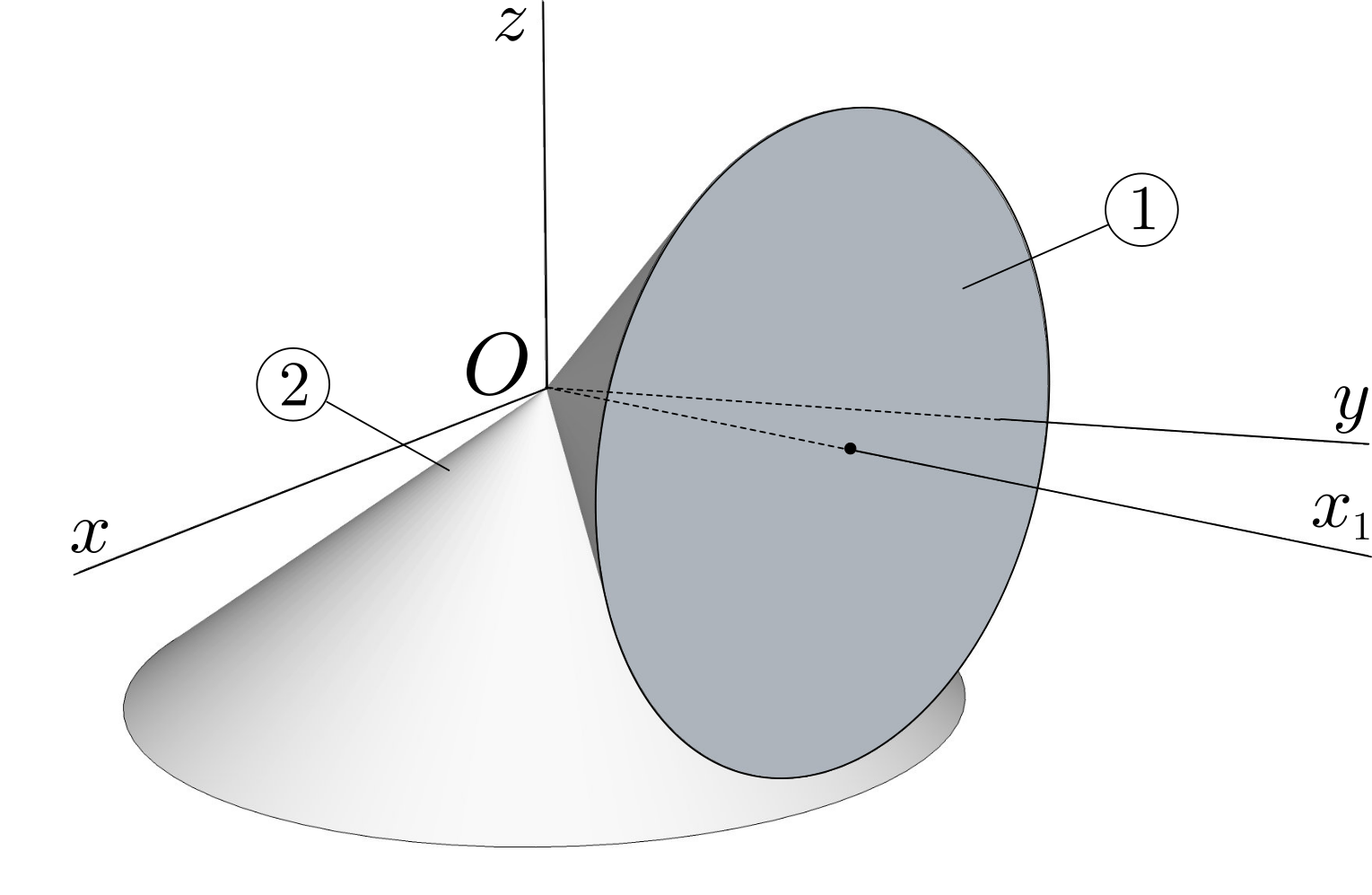
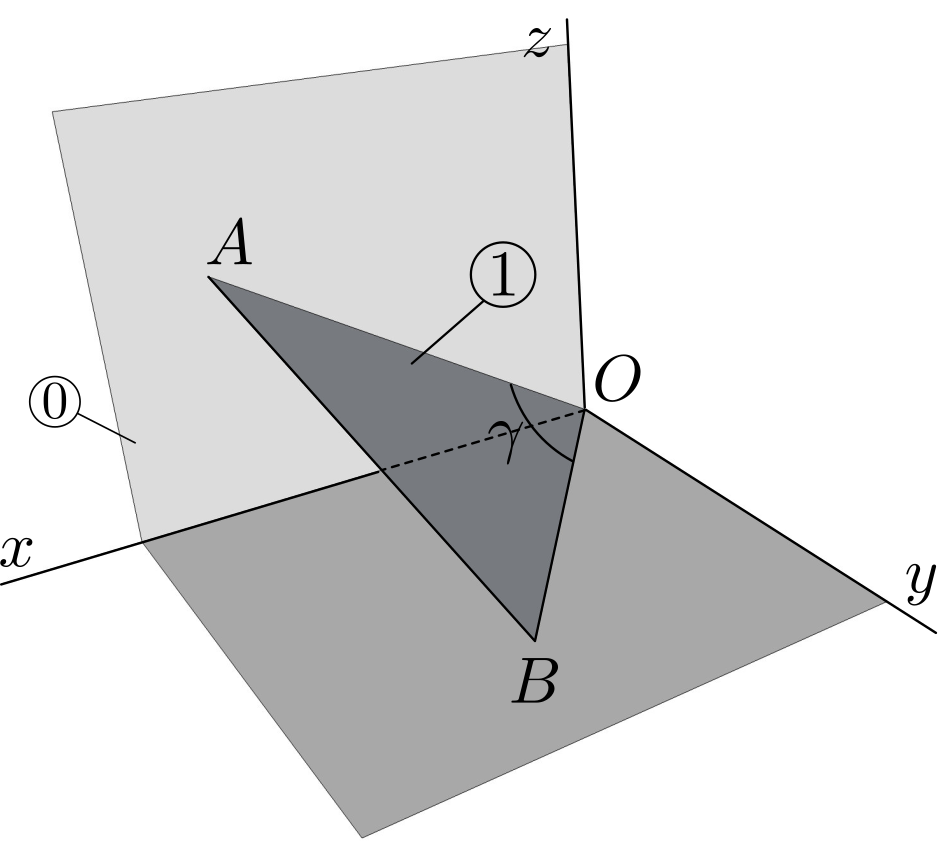
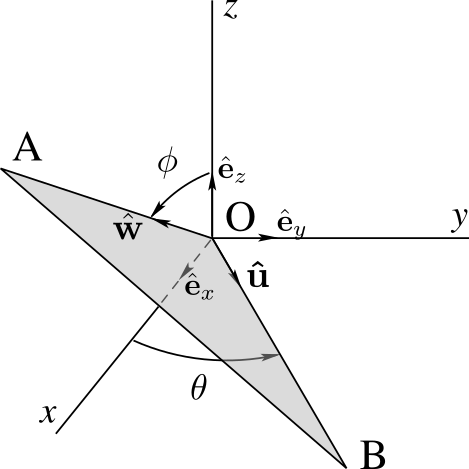
We define two bases of unit vectors: \((\bx,\by,\bz)\) attached to referential
0, and \((\bi, \bj , \bk)\) attached to plate1. The orientation of1relative to0is defined by the two angles \(\theta\) and \(\phi\text{.}\) The angle \(\theta\) defines the orientation of (right-handed) basis \((\bu , \bj , \bz)\) where \(\bj\) is directed along side \(AB\text{,}\) \(\bu\) is directed along \(OP\) perpendicular to \(AB\text{.}\) The angle \(\phi\) defines the orientation of \((\bi , \bk)\) relative to \((\bu , \bz)\text{:}\) \(\bk\) is directed along line \(PQ\text{,}\) \(\bi\) is perpendicular to the plate. See Figure 7.5.2.The quantities \(x, y, \phi\) can each be expressed in terms of angle \(\theta\text{.}\) With the diagrams shown in Figure 7.5.2 below, the vector loop equation\begin{equation*} \br_{OA}+ \br_{AP} + \br_{PQ} + \br_{QO} = \bze \end{equation*}yields 3 relationships (\(\br_{OA}= x \bx, \br_{AP}= \la \bj, \br_{PQ}= 2a \bk, \br_{OQ}=z\bz\)):\begin{equation*} x \cos\te = 2a \sin\phi, \quad \la = x \sin\te, \quad z= 2a \cos\phi \end{equation*}In addition we find 2 relationships in triangle \(OAB\text{:}\)\begin{equation*} \boxed{ x = 2b \sin\theta, \quad y = 2b \cos\theta, \quad 2a \sin \phi = 2b \sin\theta \cos\theta } \end{equation*}The last equation can also be found by expressing length \(|OP|= 2a \sin\phi \) (in triangle OQP), then \(|OP|= x \cos\theta\) (in triangle OAP).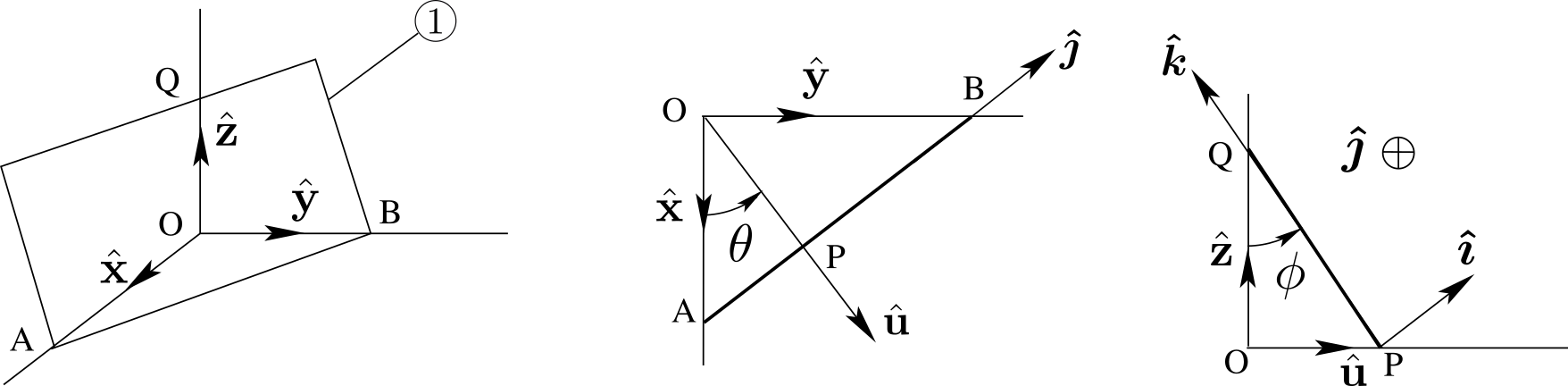
Figure 7.5.2. Then we find \(\bom _{1/0} = \dot{\te} \bz - \dot{\phi} \bj\) and \(\vel _{A/\cE} = \dot{x} \bx = 2b \dot{\te} \cos\te \bx\text{.}\) Hence,\begin{equation*} \{ {\cal V} _{1 / 0} \} = \left\{ \begin{array}{c} \dot{\te} \bz - \dot{\phi} \bj \\ 2b \dot{\te} \cos\te \bx \end{array} \right\}_A \end{equation*}To find velocity \(\vel_{Q \in 1/0}\text{,}\) we may use two methods:(i) we use the expression kinematic screw \(\{ {\cal V} _{1 / 0} \}\) to obtain \(\vel_{Q \in 1/0} = \vel_{A/0} + \bom _{1/0} \times \br_{AQ},\)(ii) we use the identity \(\vel_{Q\in 1/0}\) as the difference \(\vel_{Q/0}-\vel_{Q/1}\) with\begin{equation*} \vel_{Q/0}= d {\bf r}_{OQ}/ dt |_{0}= - 2a \dot{\phi} \sin\phi \bz \end{equation*}and\begin{equation*} \vel_{Q/1}= d {\bf r}_{AQ}/ dt |_{1}= 4b \dte\sin \te \cos\te\bj\text{.} \end{equation*}Both methods give\begin{equation*} \boxed{ \vel_{Q\in 1/0} = -4b \dte\sin \te \cos\te\bj - 2a \dot{\phi} \sin\phi \bz } \end{equation*} - To find angular acceleration \({\bal}_{1 / 0}\text{,}\) we take the time-derivative of expression \(\dot{\te} \bz - \dot{\phi} \bj\) to find\begin{equation*} \boxed{ \bal_{1 / 0} = \ddte\bz - \ddot{\phi} \bj + \dte \dot{\phi} \bu } \end{equation*}