Mechanisms can be considered as “kinematic chains” assembled from elementary kinematic pairs formed by two rigid bodies in direct contact. The analysis of mechanisms hinges on the study of kinematic pairs, and on the particular relative motion that they permit between two interconnected rigid bodies. There are many possible ways of interconnecting rigid bodies. A systematic description of all kinematic pairs is not feasible, as was discovered by Reuleaux. 1 However it is possible to classify them into two distinct classes depending on the type of contact imposed between the bodies: this leads to lower kinematic pairs and higher kinematic pairs. Lower pairs occur when the connection is realized through a surface of contact maintained between the two bodies. Higher pairs involve contact between lines or points of the two bodies. While there are many possible higher pairs, only six types of lower pairs are possible. The corresponding joints which define the interconnection in these pairs will be described in Subsection 7.2.1. They form the building block of mechanisms. However, most complex mechanisms involve a combination of lower and higher pairs. A few examples of higher pairs will be given in Subsection 7.2.2.
Subsection7.2.1Lower kinematic pairs
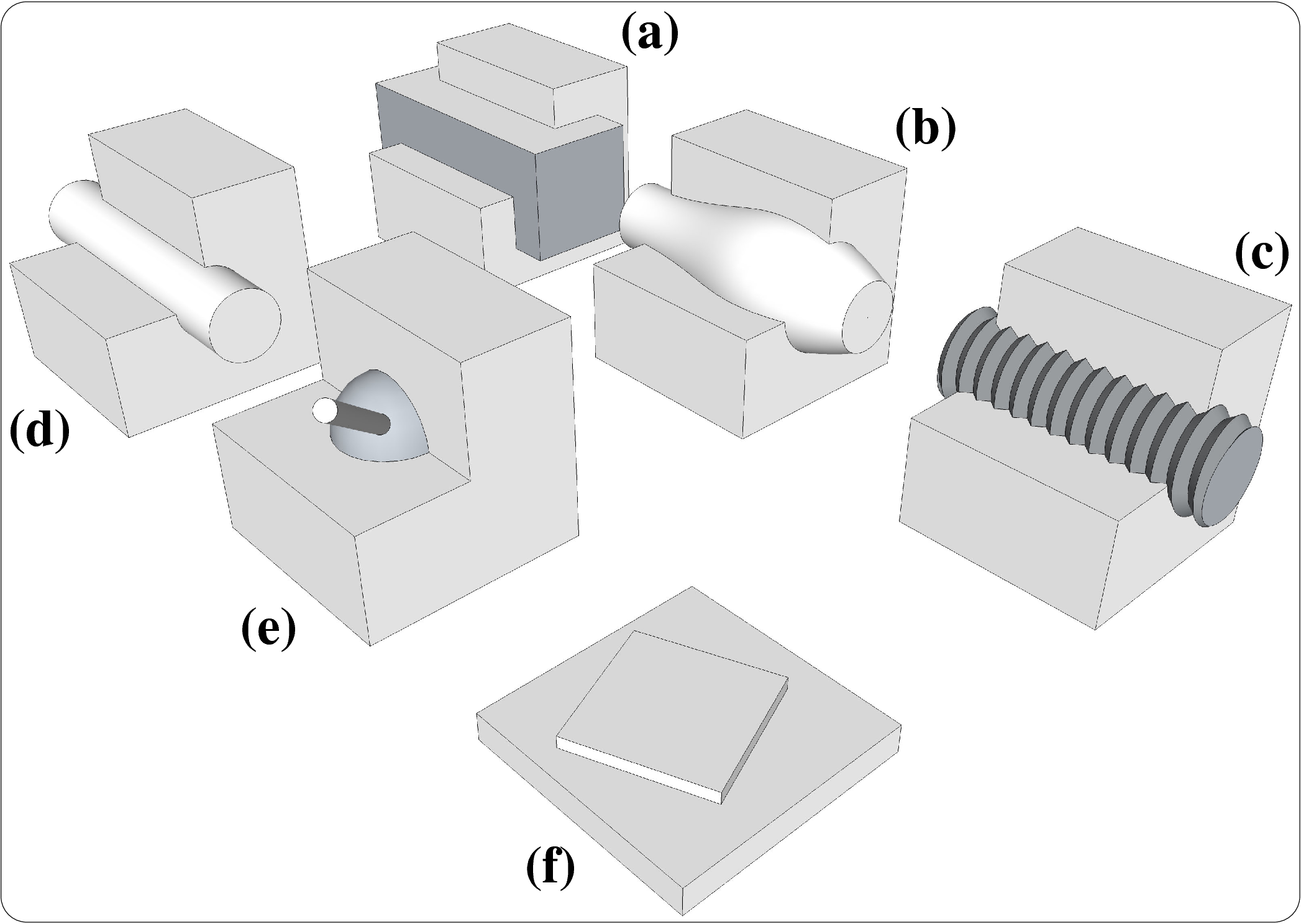
Lower kinematic pairs are achieved by direct surface contact. Arbitrary surfaces of contact do not permit relative motion between two bodies. Lower pairs correspond to the following surfaces:
prismatic surfaces (prismatic joint or slider),
surface of revolution (revolute joint or pivot),
helical surface (helical joint or screw),
right-circular cylindrical surface (cylindrical joint or slider-pivot),
spherical surface (spherical joint),
planar surface (planar joint).
These surfaces remain invariant during the motion of one body relative to the other. The resulting pairs are sketched in Figure 7.2.1. These pairs have important geometric properties.
Each joint realized between bodies \(\cB_1\) and \(\cB_2\) can be described in terms of its kinematic screw \(\{ {\cal V} _{2 / 1 } \}\) which, resolved at a particular point \(O_2\text{,}\) takes the form
on a particular basis \((\bx , \by , \bz)\) of orthonormal vectors. Since the motion of body \(\cB_2\) relative to \(\cB_1\) is constrained, there must exist relationships between the components \((\om_x , \om_y , \om_z ,v_{O_2 x}, v_{O_2 y}, v_{O_2 z} )\text{.}\) With a judicious choice of point \(O_2\) and basis \((\bx , \by , \bz)\text{,}\) it is possible to write the kinematic screw in terms of independent components by setting one or more components of the set \(\{\om_x , \om_y , \om_z ,v_{O_2 x}, v_{O_2 y}, v_{O_2 z}\}\) to zero.
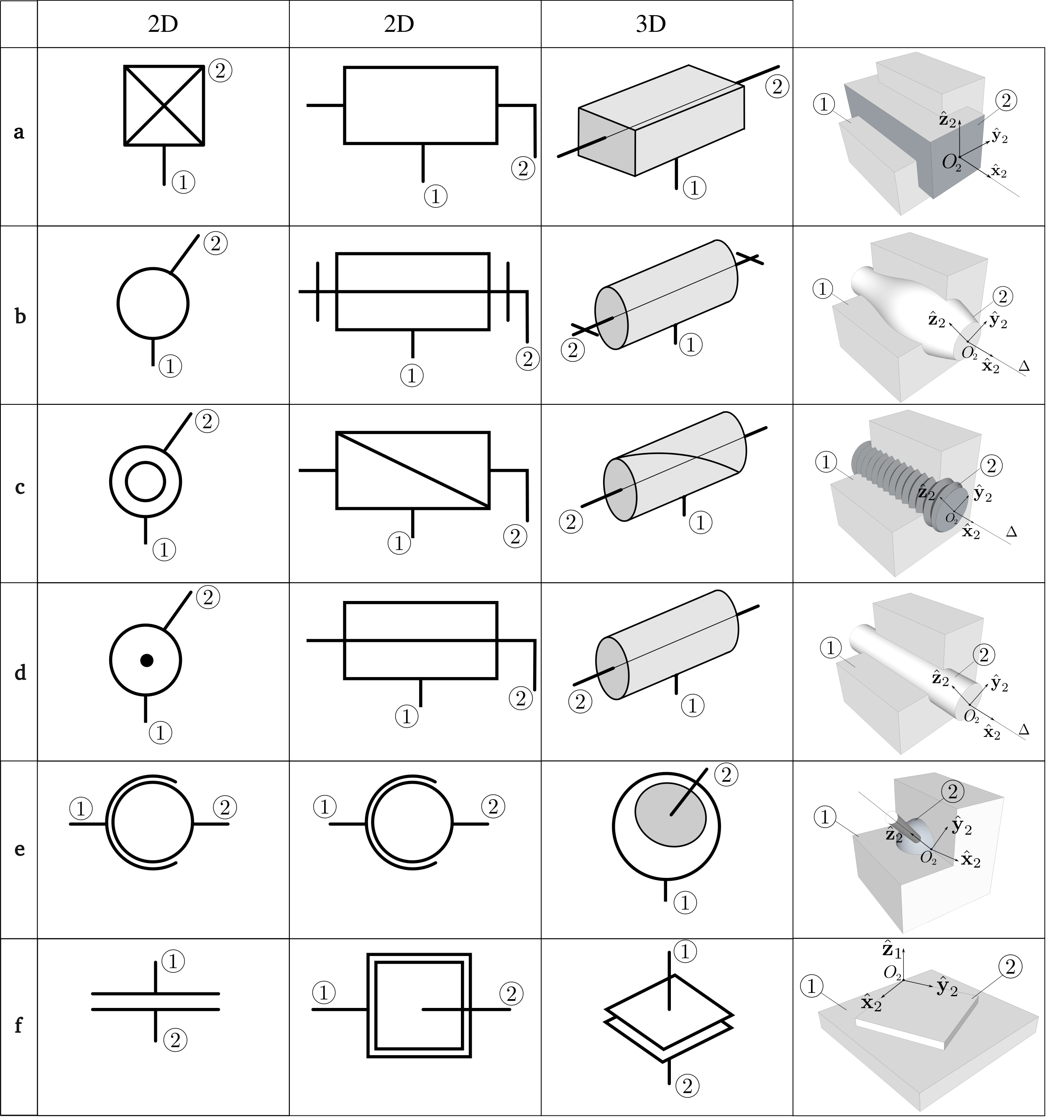
In the description of each lower kinematic pair, we give a spatial and planar schematic of the joint, and the corresponding number of degrees of freedom defined as the number of independent components of the set \(\{\om_x , \om_y , \om_z , v_{O_2x}, v_{O_2y}, v_{O_2z} \}\text{.}\) These schematic diagrams are displayed in Figure 7.2.2. These diagrams will prove useful for the modeling and kinematic analysis of complex mechanisms.
Figure7.2.1.Lower kinematic pairs.
Figure7.2.2.Schematics of kinematic pairs (joints).
Subsubsection7.2.1.1Slider
In a slider shown in Figure 7.2.1a and Figure 7.2.2a, a prismatic surface of \(\cB_2\) slides against an identical prismatic surface of \(\cB_1\text{,}\) thus restricting the motion to a rectilinear translation along a direction \(\bx_1 = \bx_2\) common to \(\cB_1\) and \(\cB_2\text{.}\) We set \((\bx_1 , \by_1 , \bz_1)
= (\bx_2 , \by_2 , \bz_2)\) with \(\bx_1 = \bx_2\) directed along the direction of the translation. This is a one-degree-of-freedom joint. The kinematic screw of \(\cB_2\) relative to \(\cB_1\) takes the form
A pivot or revolute joint shown in Figure 7.2.1b and Figure 7.2.2b is a one-degree-of-freedom joint which permits a rotation about an axis \((O_1 , \bx_1 ) = (O_2 , \bx_2)\) common to \(\cB_1\) and \(\cB_2\text{.}\) Hence, the angular velocity \(\bom_{2/1} = \om_x \bx_1\) has two vanishing components, and the velocity \(\vel_{O_2 \in 2 /1}\) of point \(O_2\) is zero, as is the velocity of any point on the axis of rotation
A slider-pivot or cylindrical joint shown in Figure 7.2.1d and Figure 7.2.2d is a two-degree-of-freedom joint which permits body \(\cB_2\) to rotate about and translate along an axis \((O_1 , \bx_1 )\) of body \(\cB_1\text{.}\) We may take \(\bx_1 = \bx_2\) and point \(O_2\) on axis \((O_1 , \bx_1)\text{.}\) Hence, both the angular velocity \(\bom_{2/1} = \om_x \bx_1\) and the velocity \(\vel_{O_2 /1} = v_{O_2x} \bx_1\) of point \(O_2\) have two vanishing components. The motion \(\cB_2\) relative to \(\cB_1\) is helical about axis \((O_1 , \bx_1 )\) and all points of axis \((O_2 , \bx_2)\) have the same velocity \(v_{O_2 x} \bx_1\text{:}\)
A helical joint or screw shown in Figure 7.2.1c and Figure 7.2.2c is a slider-pivot joint for which the rotational and translational motions are constrained by the relation \(v_{O_2 x} = (p / 2\pi) \om_x\text{.}\) The constant \(p\) is the pitch of the screw: it is the distance traveled by point \(O_2\) on axis \((O_1 , \bx_1)\) when \(\cB_2\) rotates by a full revolution. Thus, this is a one-degree-of-freedom joint, and the corresponding kinematic screw can be written as
In a spherical or ball-socket joint shown in Figure 7.2.1e and Figure 7.2.2e, a single point \(O_2\) of \(\cB_2\) remains fixed in \(\cB_1\text{:}\) we may set \(O_2=O_1\text{.}\) The orientation of basis \((\bx_2 , \by_2 , \bz_2)\) relative to basis \((\bx_1 , \by_1 , \bz_1)\) is however arbitrary. The components \((\om_x, \om_y , \om_z)\) of \(\bom_{2/1}\) on basis \((\bx_1 , \by_1, \bz_1 )\) (or basis \((\bx_2 , \by_2, \bz_2 )\text{.}\) are independent of each other: a spherical joint is a three-degree-of-freedom joint with corresponding kinematic screw
In a planar joint shown in Figure 7.2.1f and Figure 7.2.2f, a plane \((O_2 , \bx_2, \by_2)\) of \(\cB_2\) coincides with a plane \((O_1 , \bx_1, \by_1)\) of \(\cB_1\text{.}\) Hence the motion of point \(O_2\) of plane \((O_2 , \bx_2, \by_2)\) has two degrees of freedom: \(\vel_{O_2 \in 2/1} = v_{O_2 x}\bx_1 + v_{O_2 y} \by_1\text{.}\) In addition, \(\cB_2\) is free to rotate about vector \(\bz_1 = \bz_2\) normal to plane of motion with angular velocity \(\bom_{2/1} = \om_z \bz_1\text{.}\) The components \((\om_z, v_{O_2 x}, v_{O_2 y} )\) are independent: a planar joint is a three-degree-of-freedom joint with corresponding kinematic screw
A more detailed study of planar motions will be given in Section 7.4.
Subsection7.2.2Higher kinematic pairs
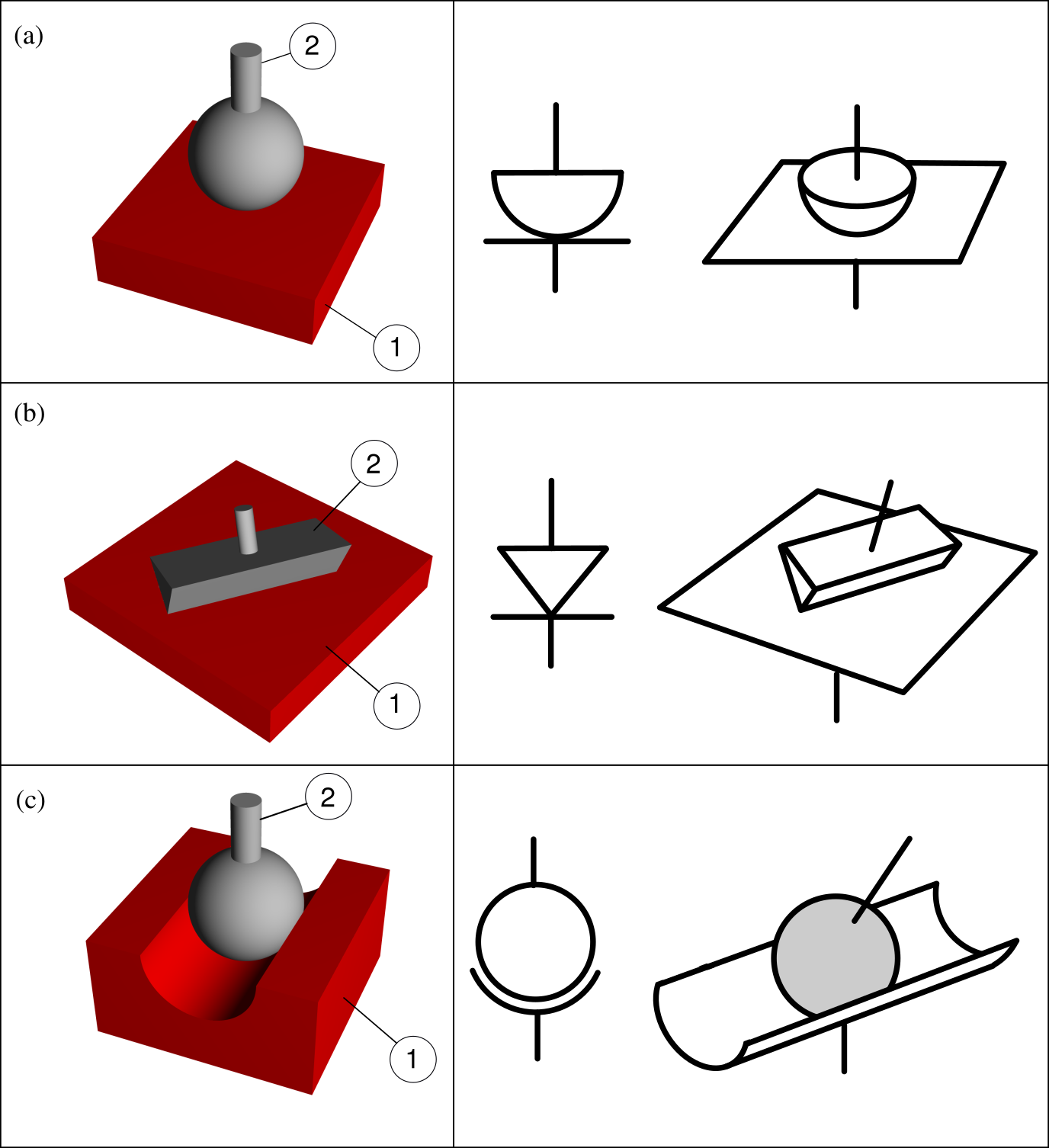
Higher kinematic pairs are characterized by line or point contact, such as would occur in ball or roller bearings, gears, cams, etc. Figure 7.2.3 shows three examples of higher pairs. Note that higher kinematic pairs, as opposed to lower pairs, often require to be connected with other pairs to be functional.
Figure7.2.3.Examples of higher kinematics pairs.
Figure 7.2.3(a) shows a body \(\cB_2\) bounded by a curved surface in contact with a planar surface of \(\cB_1\) about a single point \(O_2\) of \(\cB_2\text{.}\) Since \(O_2\) is constrained to remain in a plane \((O_1 , \bx_1 , \by_1)\) of \(\cB_1\text{,}\) its velocity takes the form \(\vel_{O_2 \in 2 /1}= v_{O_2x}\bx_1+ v_{O_2y}\by_1\text{.}\) The orientation of \(\cB_2\) relative to \(\cB_1\) is free to vary arbitrarily. Assuming the components \((\om_x, \om_x , \om_z, v_{O_2x} , v_{O_2y})\) independent, we have a five-degree-of-freedom joint with corresponding kinematic screw
Constraints realized by point contact will be analyzed in more detail in Section 7.4.
Figure 7.2.3(b) shows a body \(\cB_2\) constrained to remain in contact with a plane \((O_1 , \bx_1 , \by_1)\) of \(\cB_1\) along a line \((O_2 , \bx_2)\) of \(\cB_2\text{.}\) This line constraint in turn imposes a constraint on the orientation of a basis of \(\cB_2\text{:}\) a basis \((\bx_2 , \by_2 , \bz_2)\) of \(\cB_2\) is obtained by a rotation about \(\bz_1\) normal to the plane of contact followed by a rotation about \(\bx_2\text{:}\) this leads to \(\bom_{2/1} = \om_x \bx_2 + \om_z \bz_1\text{,}\) and \(\vel_{O_2 \in 2 /1}
= v_{O_2x} \bx_1 + v_{O_2y}\by_1\text{.}\) Assuming the components \((\om_x, \om_z , v_{O_2x} , v_{O_2y})\) independent, this joint has four degrees of freedom joint whose kinematic screw is given by
Finally, Figure 7.2.3(c) shows a sphere constrained to the interior surface of a cylinder. The two surfaces are in contact along an arc of circle. The center \(O_2\) of the sphere is constrained to move along the axis \((O_1 , \bx_1)\) of the cylinder: this imposes \(\vel_{O_2 /1}= v_{O_2x}\bx_1\text{.}\) The orientation of basis \((\bx_2 , \by_2 , \bz_2)\) of the sphere relative to basis \((\bx_1 , \by_1 , \bz_1)\) of the cylinder is however arbitrary. This is a four-degree-of-freedom joint with corresponding kinematic screw
It can be viewed as the combination of a slider and a spherical joint.
Subsection7.2.3Example: The circular slider
Finally, we end this section with an example of a joint which would appear to define an additional lower kinematic pair.
Example7.2.4.
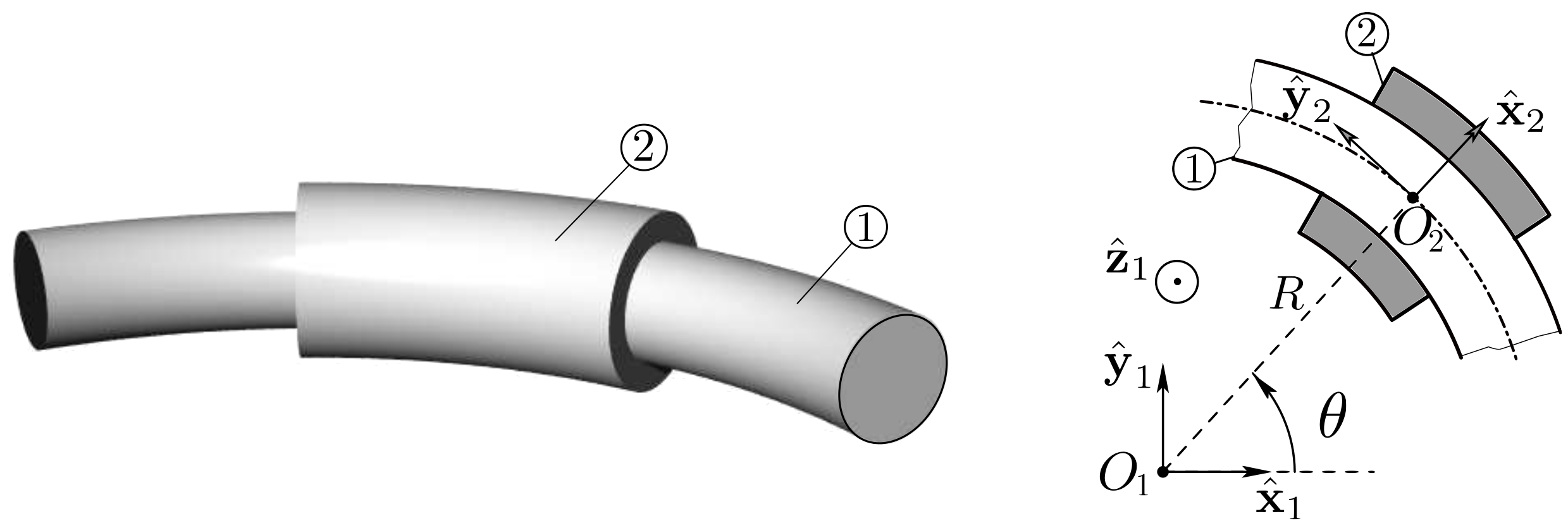
A lower kinematic pair may be created by imposing contact between two toroidal surfaces as displayed in Figure 7.2.5. After identifying the possible relative motion between the two bodies, parametrize the position of \(\cB_2\) relative to \(\cB_1\text{.}\) We may call the corresponding pair “circular slider”.
Figure7.2.5.
By finding the corresponding kinematic screw, show that this assembly does not define a new kinematic pair.
Solution.
Consider the common midplane of \(\cB_1\) and \(\cB_2\) as shown in Figure 7.2.5: a point \(O_2\) of \(\cB_2\) can be considered as lying on the midline of \(\cB_2\text{.}\) Angle \(\theta = (\bx_1, \br_{O_1 O_2})\) defines the position of \(O_2\) relative to \(\cB_1\text{.}\) Let \(\bx_2\) be the unit vector such that \(\br_{O_1 O_2} = R \bx_2\) (\(R\) is a constant). It is readily seen that unit vector \(\bx_2\) is attached to \(\cB_2\text{.}\) Then define \(\by_2 = \bz_1 \times \bx_2\text{.}\) The basis of unit vectors \((\bx_2 , \by_2 , \bz_2 )\) is attached to \(\cB_2\text{.}\) Its orientation relative to \(\cB_1\) is defined by the same angle \(\theta\text{.}\) Hence, we can write the kinematic screw of \(\cB_2\) in the following form
In the last expression, we have used \(\vel_{O_1 \in 2/1} = R\dte \by_2 + \dte\bz_1
\times (- R\bx_2) = \bze\text{.}\) Hence, this is the kinematic screw of a body in rotation about axis \((O, \bz_1)\text{:}\) the kinematic pair is equivalent to a pivot of axis \((O , \bz_1)\text{.}\) We conclude that this is not a new lower kinematic pair.