Consider a rigid body \(\cB\) of mass center \(G\) and mass \(m\) in motion relative to a referential \(\cE\text{.}\) Consider the centroidal referential \(\cE^*\) defined as the referential relative to which \(G\) is fixed and whose orientation is invariant relative to \(\cE\text{:}\)
Show that the kinetic and dynamic screws of \(\cB\) relative to \(\cE^*\) are couples, that is, the angular momentum \(\bH_{A, \cB /\cE^*} = \bH_{\cB}^*\) and the dynamic moment \(\bD_{A, \cB /\cE^*}=\bD_\cB^*\) are independent of the choice of point \(A\text{.}\)
Show that the angular momenta, dynamic moments and kinetic energies of \(\cB\) relative to \(\cE\) and \(\cE^*\) are related according to the equations
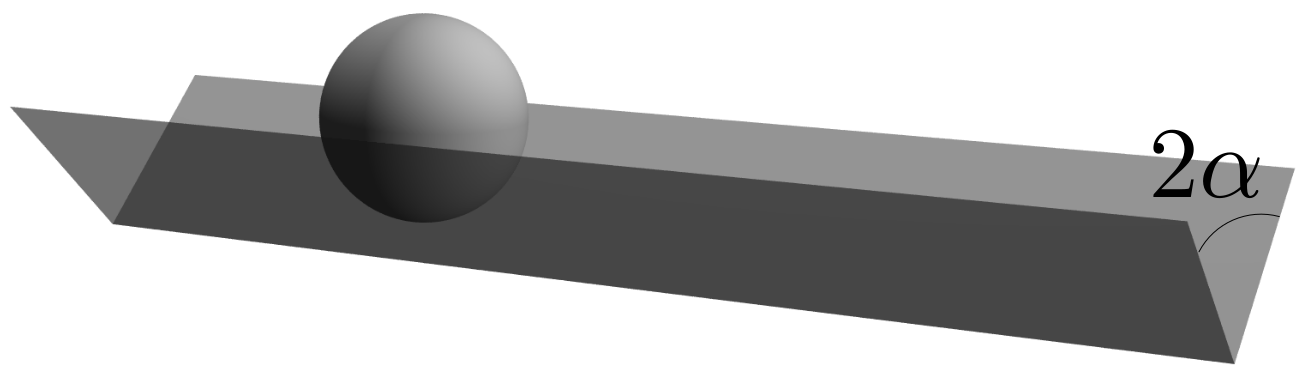
A uniform spherical ball \(\cB\) of mass \(m\text{,}\) radius \(r\) rolls without slipping in a wedge-shaped guide of angle \(2\alpha\text{.}\) Its mass center \(G\) is assumed to move at a constant speed \(v_0\text{.}\)
Find the kinetic screw of body \(\cB\) in terms of \(v_0\text{,}\)\(m\text{,}\) and the geometric parameters.
Find its kinetic energy.
Figure9.10.1.
3.
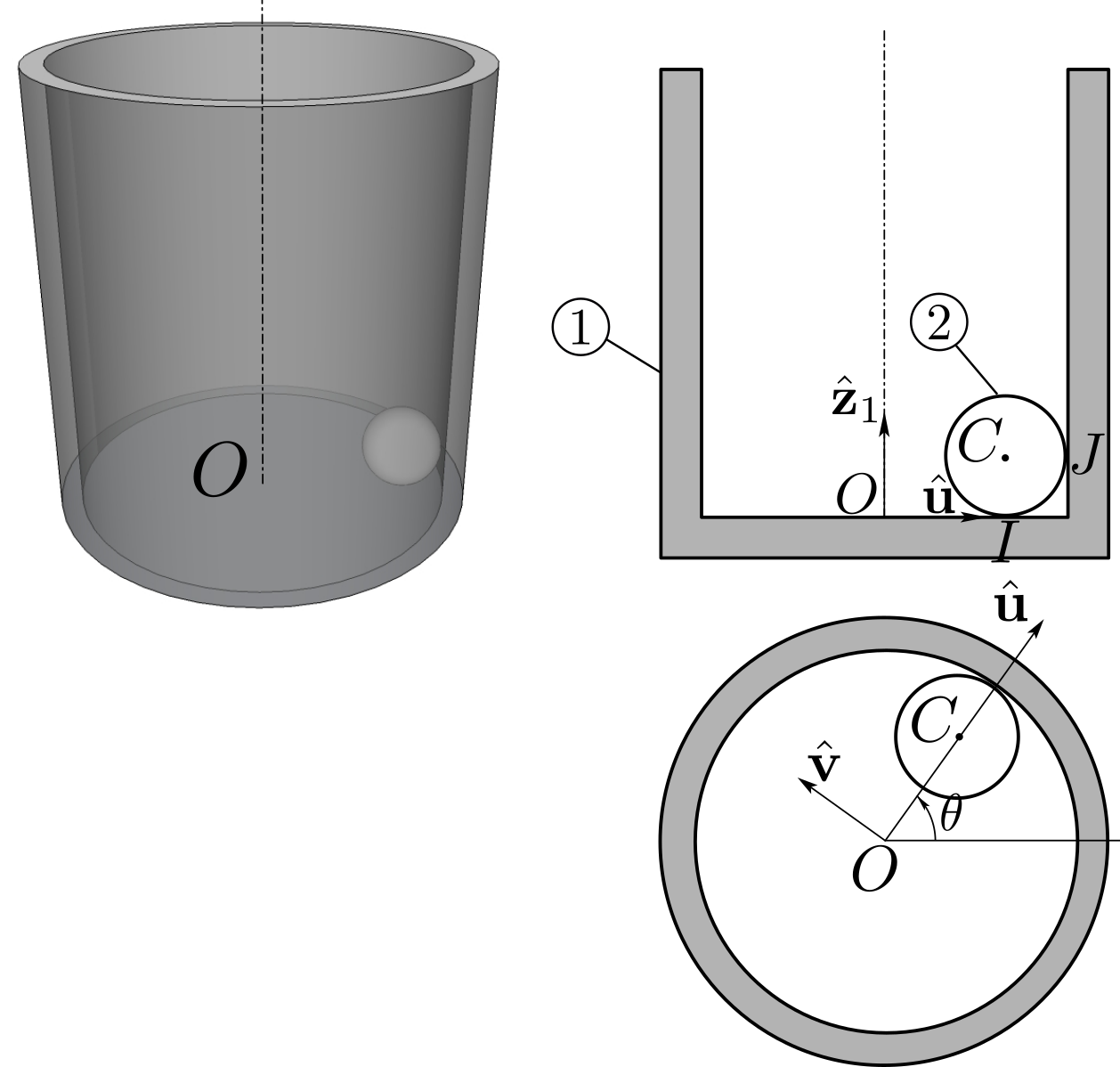
A homogeneous sphere 2 of radius \(r\text{,}\) mass \(m\text{,}\) center \(C\) is in motion inside a cylindrical container 1 of radius \(R\) and axis \((O, \bz_1)\text{.}\) Ball 2 remains in contact at points \(I\) and \(J\) of 1.
Figure9.10.2. Assume that there is no-slip at both points \(I\) and \(J\text{.}\) The position of point \(C\) relative to body 1 is defined by angle \(\theta\text{.}\)
Determine the kinetic screw, the dynamic screw and the kinetic energy of body 2 relative to 1.
4.
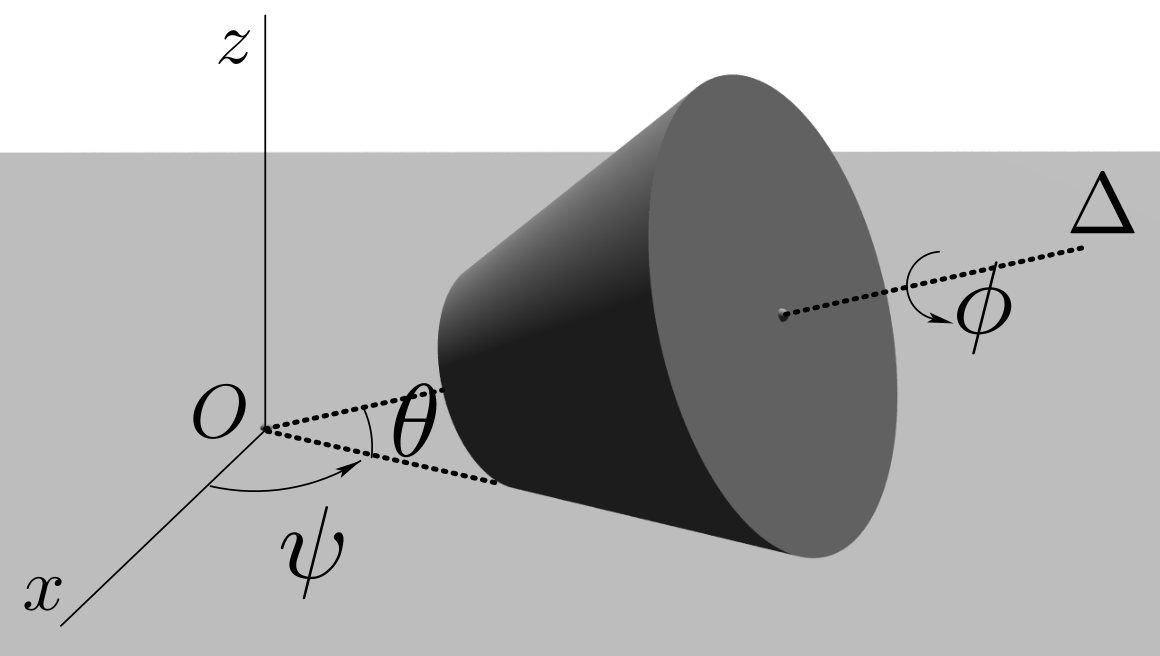
A truncated, homogeneous cone \(\cB\) of mass \(m\) and half-angle \(\theta\) rolls without slipping on a horizontal plane \(Oxy\) of a referential \(\cE\) so that its axis \(\Delta\) intersects plane \(Oxy\) at point \(O\text{.}\) The motion is characterized by angles \(\psi (t)\text{,}\) and \(\phi (t)\text{.}\) Its mass center \(G\) remains at a constant distance \(h\) from \(O\text{.}\) Its inertia operator about \(G\) is characterized by its axial moment of inertia \(A\) and its transverse moment of inertia \(B\text{.}\)
Figure9.10.3.
Find the kinematic screw of \(\cB\) by accounting for all constraints.
Find its kinetic screw \(\{ \cH_{\cB /\cE} \}\) resolved about \(O\text{.}\)
Find its dynamic moment \(\bD_O\) about \(O\text{.}\)