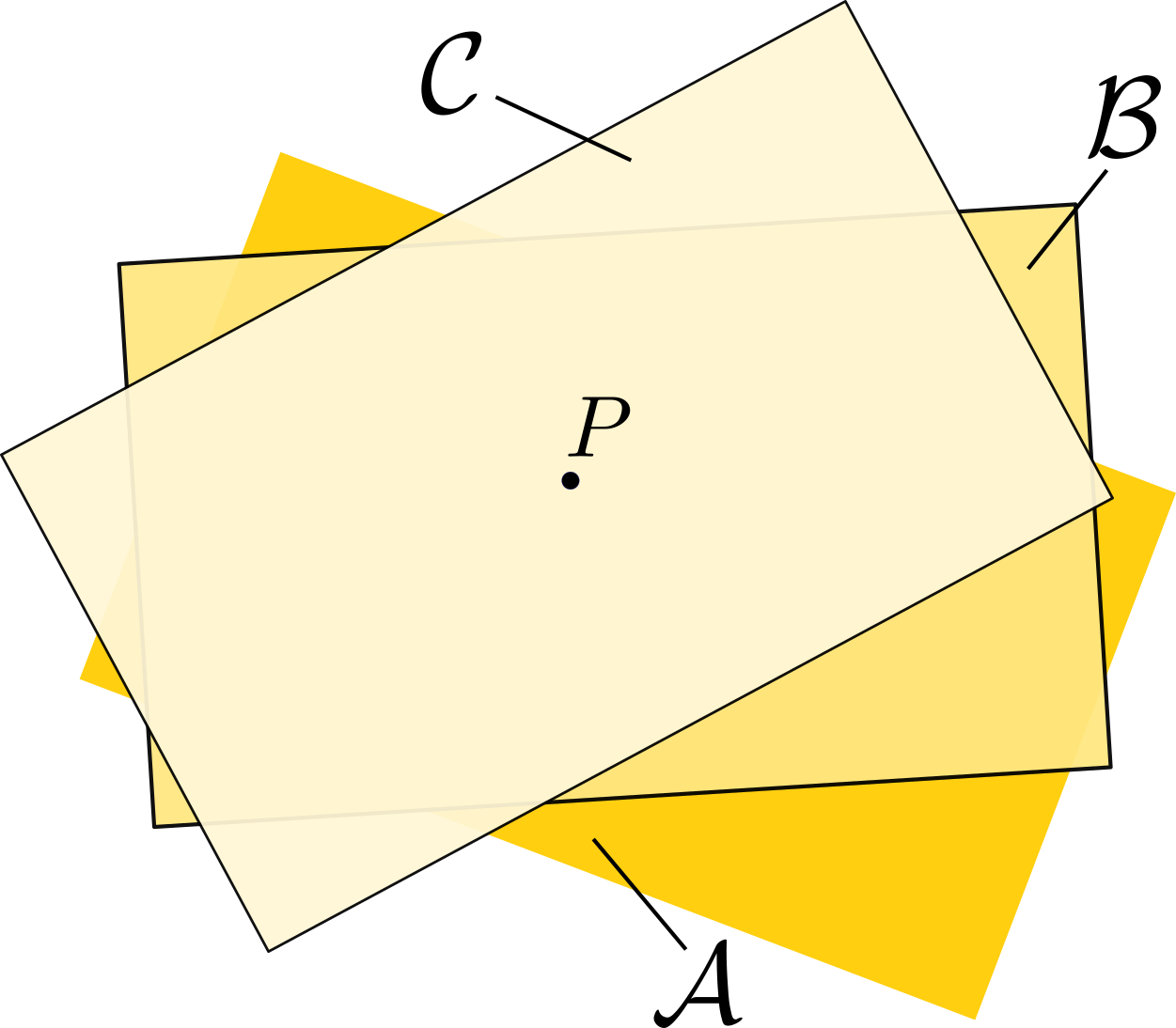
We can extend the change of referential formula (6.2.1) derived in Section 6.2 by assuming that particle \(P\) moving relative to body \(\cB\) (itself in motion relative to body \(\cA\)) is actually instantaneously attached to a third body \(\cC\text{:}\) hence, the problem is to determine the kinematics of \(\cC\) relative to \(\cA\) from the knowledge of its kinematics relative to \(\cB\text{.}\) More specifically, can the kinematic screw \(\{ \cV _{\cC / \cA } \}\) be obtained from kinematic screws \(\{ \cV _{\cC / \cB } \}\) and \(\{ \cV _{\cB / \cA} \}\text{?}\) See Figure 6.5.1.
Figure6.5.1.Point \(P\) instantaneously attached to body \(\cC\) in motion relative to referentials \(\cA\) and \(\cB\text{.}\)
Recall from Section 3.1 that, given three rigid bodies (or referentials) \(\cA\text{,}\)\(\cB\) and \(\cC\) in relative motion, the angular velocities \(\bom_{\cC / \cA}\text{,}\)\(\bom_{\cA / \cB}\) and \(\bom_{\cB / \cC}\) satisfy the loop equation:
Now consider the point of body \(\cC\) coinciding with \(P\text{:}\) velocities \(\vel_{P /\cA}\) and \(\vel_{P /\cB}\) in (6.2.1) are now replaced by the transport velocities \(\vel_{P\in \cC / \cA}\) and \(\vel_{P\in \cC / \cB}\text{,}\) respectively. Equation (6.5.2) now becomes
Since \(\vel_{P\in \cC / \cB} = - \vel_{P\in \cB / \cC}\) and \(\vel_{P\in \cB / \cA}= -\vel_{P\in \cA / \cB}\text{,}\) this leads to the following velocity loop equation
Equations (6.5.1) and (6.5.3) can be grouped in screw notation to obtain the following fundamental theorem:
Theorem6.5.2.Kinematic Loop Formula.
Given three rigid bodies (referentials) \(\cA\text{,}\)\(\cB\) and \(\cC\) in relative motion, the kinematic screws \(\{ \cV _{\cC / \cA } \}\text{,}\)\(\{ \cV _{\cA/ \cB } \}\text{,}\) and \(\{ \cV _{\cB / \cC } \}\) add up to zero:
Equation (6.5.5) is shown by letting \(\cC = \cA\) in equation (6.5.4), noting that \(\{ \cV _{\cA / \cA } \} = \{ 0\}\text{.}\)
Remark6.5.3.
\(\danger\)It is not possible to write an acceleration loop equation, that is, in general we have \(\ba_{P\in \cC / \cA} + \ba_{P\in \cA / \cB}+ \ba_{P\in \cB / \cC} \neq \bze\) due to the presence of Coriolis accelerations.
The kinematic loop formula will prove to be pivotal to the kinematic analysis of mechanisms, as will be seen in Chapter 8. We illustrate its use with the following example.
Example6.5.4.
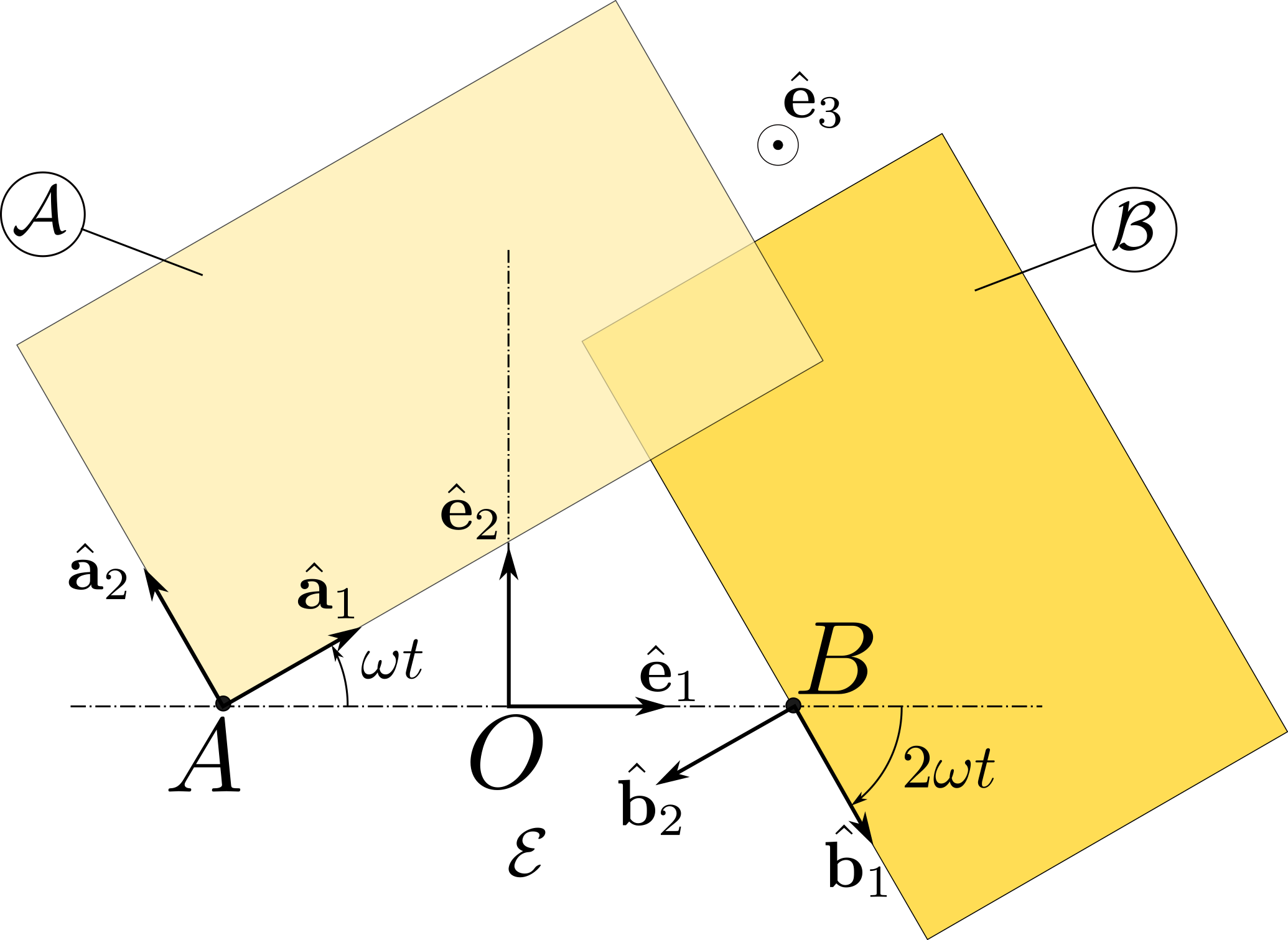
Two referentials \(\cA (A,\ba_1,\ba_2,\be_3)\) and \(\cB (B,\bhb_1,\bhb_2,\be_3)\) are in rotational motion about axis \((A,\be_3)\) and \((B, \be_3)\text{,}\) respectively, relative to a referential \(\cE (O,\be_1,\be_2,\be_3)\text{.}\) Points \(A\) and \(B\) are located on axis \((O,\be_1)\text{,}\) with \(O\) midpoint of \(AB\text{.}\)\(\cA\) rotates at constant angular velocity \(\om\) in the counterclockwise direction. \(\cB\) rotates at constant angular velocity \(2\om\) in the clockwise direction. The axes \((A,\ba_1)\) and \((B,\bhb_1)\) both coincide with axis \((O,\be_1)\) at \(t=0\text{.}\) Denote by \(2\ell\) the distance \(|AB|\text{.}\) See Figure 6.5.5.
Figure6.5.5.
Find the kinematic screw \(\{\cV_{\cB/\cA} \}\) resolved at point \(A\text{,}\) then at point \(B\text{.}\)
Show that \(\cB\) is in instantaneous rotation relative to \(\cA\text{.}\) Determine the corresponding instantaneous axis of rotation \(\Delta\text{.}\) Describe the surfaces described by \(\Delta\) during its motion relative to \(\cA\text{,}\) then relative to \(\cB\text{.}\)
Characterize the motions of \(\cA\) and \(\cB\) relative to \(\cE\text{.}\)
Solution.
We can use the kinematic loop formula to find \(\{\cV_{\cB/\cA} \}=\{\cV_{\cB/\cE} \}- \{\cV_{\cA/\cE} \}\) with
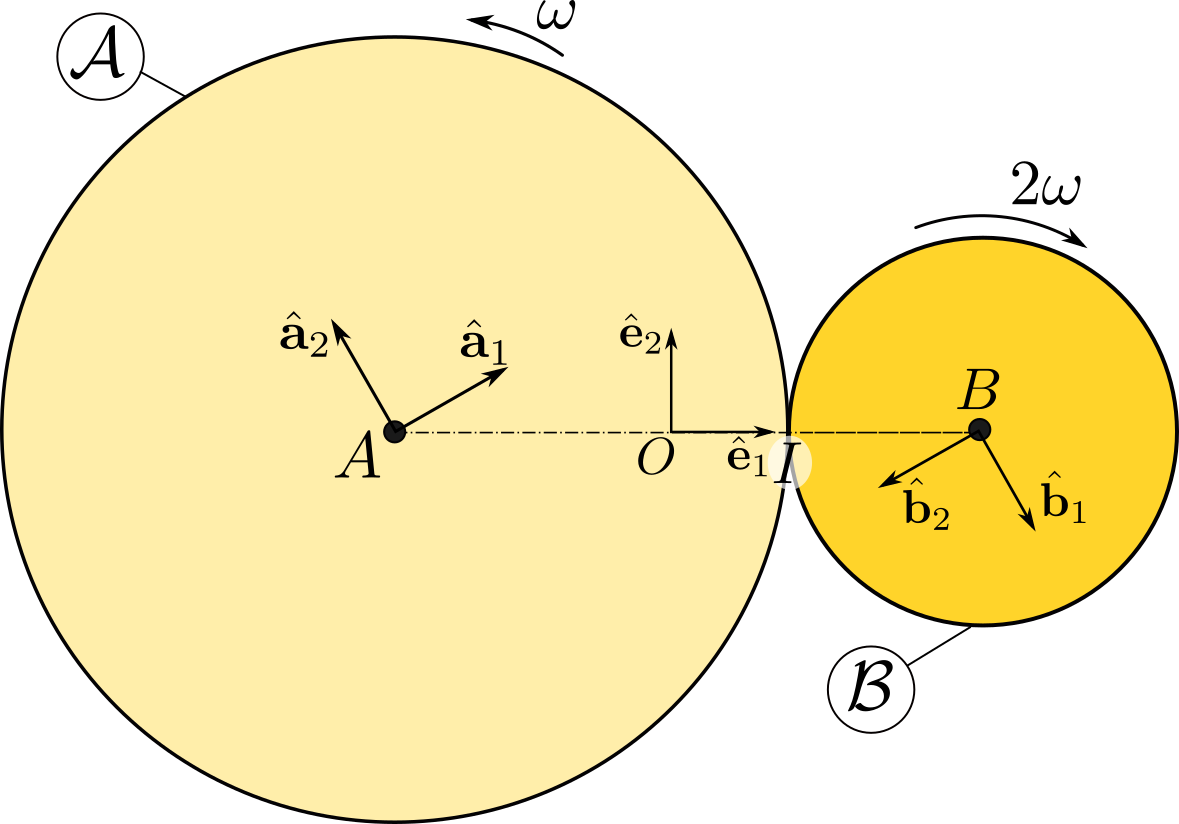
To show that \(\{\cV_{\cB/\cA} \}\) is a slider, we use the result of Theorem 4.5.2. Since \(\{\cV_{\cB/\cA} \}\) is the sum of two sliders whose axes are parallel, \(\{\cV_{\cB/\cA} \}\) must be a slider of axis \(\Delta\) directed along \(\bom_{\cB/\cA} = -3 \om \be_3\text{.}\) We look for the point \(I\) of \(\Delta\) lying in plane \((O,\be_1, \be_2)\) which satisfies \(\vel_{I\in\cB /\cA} =\bze\text{,}\) that is, \(3 \om \be_3\times \br_{AI}= 4\ell \om \be_2\text{.}\) Upon taking the cross-product of this last equation with \(\be_3\text{,}\) we find \(\br_{AI}= \frac{4\ell}{3} \be_1\text{.}\)
This shows that the motion \(\cB\) relative to \(\cA\) is characterized by the instantaneous axis of rotation \(\Delta (I,\be_3)\) with \(\br_{OI}=\frac{\ell}{3} \be_1\text{.}\) We note that \(\Delta\) is fixed relative to \(\cE\text{.}\) When time varies, \(\Delta\) describes a cylinder centered about \((B,\be_3)\) of radius \(2\ell/3\) relative to \(\cB\text{.}\) Similarly, \(\Delta\) describes relative to \(\cA\) a cylinder centered about \((A,\be_3)\) of radius \(4\ell/3\text{.}\) As far as their velocity field is concerned, the motions of \(\cA\) and \(\cB\) can thus be viewed as the motion of two cylinders in contact along \(\Delta (I,\be_3)\text{.}\) The contact is achieved without slipping.