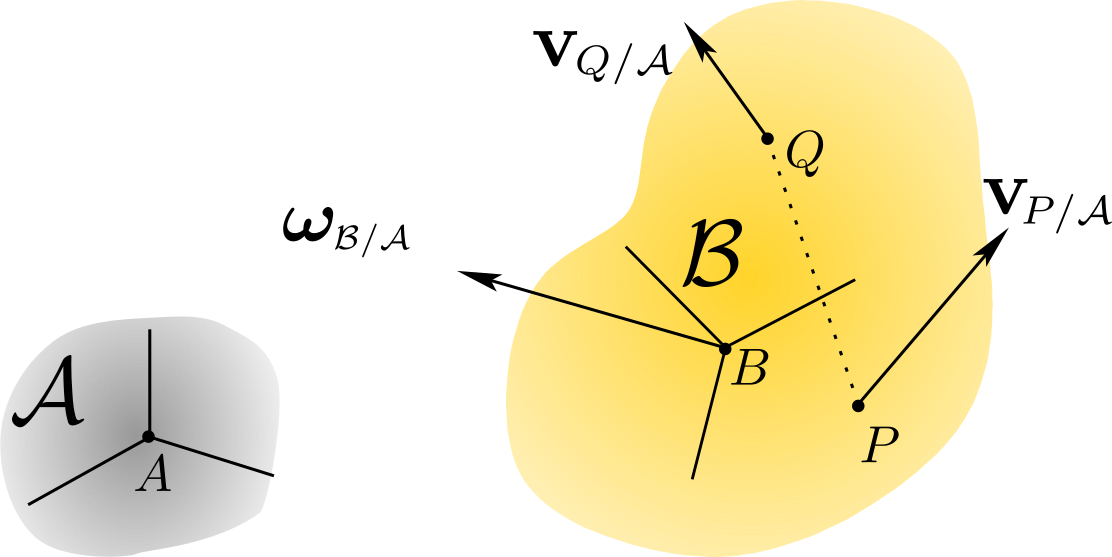
Consider two rigid bodies (or referentials) \(\cA\) (of origin \(A\)) and \(\cB\) (of origin \(B\)) in relative motion. See Figure 3.6.1. We wish to characterize the velocity field \(P\in\cB \mapsto \vel_{P /\cA}\) of rigid body \(\cB\) (the symbol \(\in\) signifies “element of” or “belonging to”). relative to \(\cA\text{.}\) Specifically, we ask whether velocities of points of \(\cB\) relative to \(\cA\) are related to one another.
Figure3.6.1.Two rigid bodies in relative motion.
Consider two points \(P\) and \(Q\)fixed in \(\cB\) at all times. The motion of \(\cB\) relative to \(\cA\) is characterized by angular velocity \(\bom_{\cB/\cA}\text{:}\) recall that for any vector \(\bvv\) fixed in \(\cB\) the time-derivative of \(\bvv\) relative to \(\cA\) can be expressed as \((d \bvv /dt )_{\cA} = \bom _{\cB/ \cA} \times \bvv\text{.}\) By choosing \(\bvv = \br_{PQ}\) which is constant in \(\cB\text{,}\) we can write
Hence, at any given time, it is entirely characterized by the knowledge of
the angular velocity \(\bom _{\cB/ \cA}\) and
the velocity of a particular point, say \(B\text{,}\) attached to \(\cB\text{.}\)
Two particular motions can be examined in the context of formula (3.6.1):
If body \(\cB\) is in translational motion relative to \(\cA\text{,}\) its angular velocity vanishes at all times (\(\bom_{\cB/\cA} = \bze\)). Body \(\cB\) keeps the same orientation relative to \(\cA\) thoughout its motion. Equation (3.6.1) implies that \(\vel_{Q /\cA} = \vel_{P /\cA}\text{.}\) All points of \(\cB\) have the same velocity at any given time.
If body \(\cB\) is in rotational motion relative to \(\cA\) about axis \(\Delta (A , \bha_3 = \bhb_3)\text{,}\) its angular velocity is directed along \(\bha_3\) at all times: \(\bom_{\cB/\cA} = \dte \bha_3\text{.}\) Then \(\vel_{P /\cA} = \dte \bha_3 \times \br_{AP} = \dte \bha_3 \times \br_{HP}\) where \(H\) is the projection of \(P\) onto axis \(\Delta\) (so that \(\br_{HP}\cdot\bha_3 =0\)).
Remark3.6.3.
Vector fields \(P \mapsto \bvv_P\) satisfying the relationship \(\bvv_Q = \bvv_P + \bV \times \br_{PQ}\) play a central role in rigid-body mechanics. They possess important properties which result from their simple structure. Their study will be devoted toChapter 4.
Here is an example to illustrate the use of equation (3.6.1).
Example3.6.4.
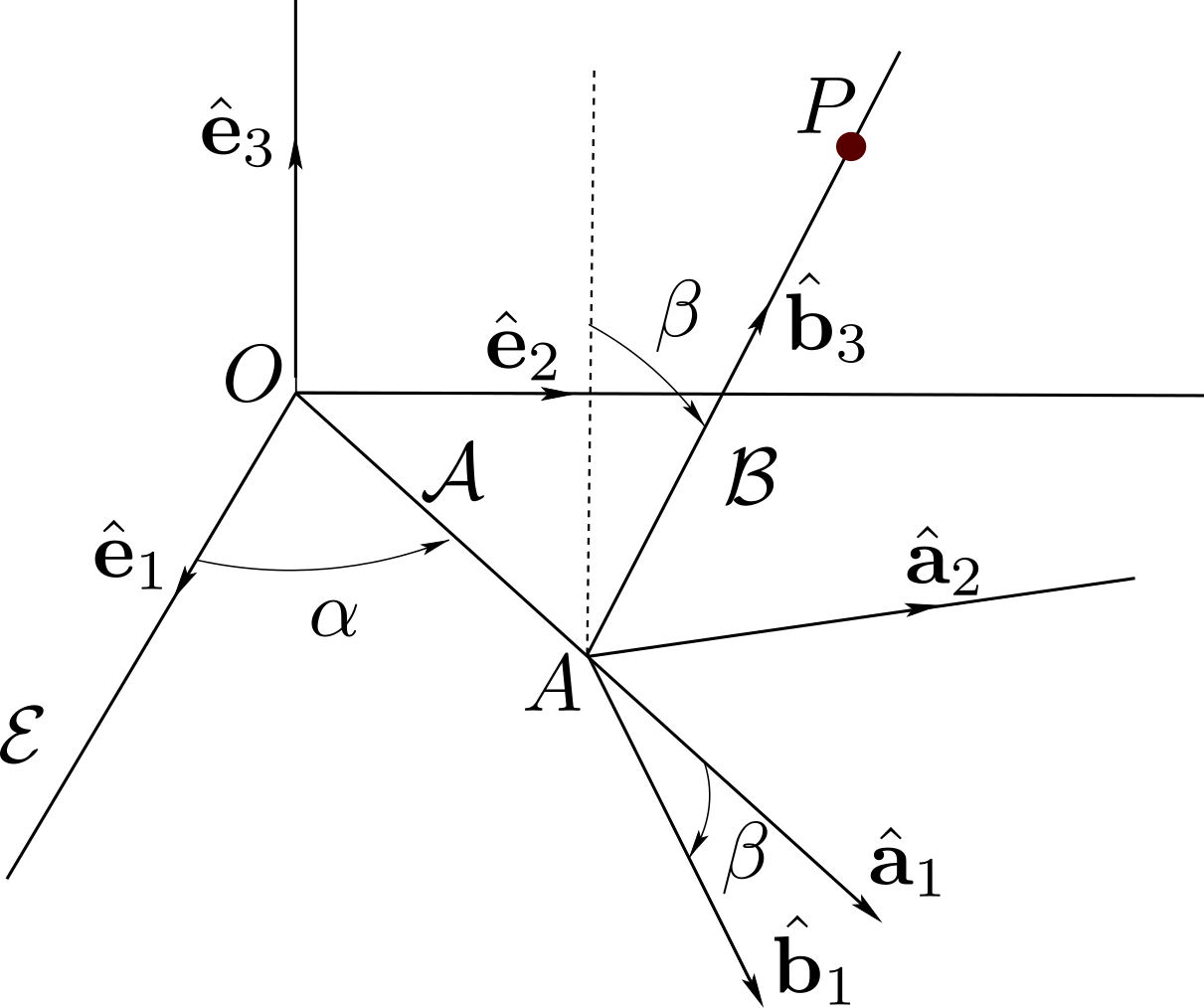
Consider the system of Example 3.2.12 which defines two interconnected bodies \(\cA (O, \bha_1, \bha_2, \bha_3 = \be_3)\) and \(\cB (A, \bhb_1, \bhb_2 = \bha_2, \bhb_3)\) in motion relative to referential \(\cE (O, \be_1 , \be_1 , \be_3 )\text{.}\) Point \(A\) of \(\cA\) is defined by \(\br_{OA} = a \bha_1\text{.}\) Point \(B\) attached to \(\cB\) such that \(\br_{AB} = b \bhb_3\) (\(a\) and \(b\) are positive constants). See Figure 3.6.5.
Figure3.6.5.
Find the velocity \(\vel_{A /\cE}\) of point \(A\text{.}\) Then find the velocity of \(\vel_{B /\cE}\) using \(\vel_{A /\cE}\) and formula (3.6.1). Compare with the direct approach obtained by taking the time derivative of \(\br_{OB}= a \bha_1 + b \bhb_3\) relative to \(\cE\text{.}\)
Consider the point \(P\) which moves along axis \((A, \bhb_3)\) according to \(\br_{AP} = \rho (t) \bhb_3\text{.}\) Find velocity \(\vel_{P/\cE}\) and compare with the expression obtained by determining \(\vel_{A/\cE}+\bom_{\cB /\cE} \times \br_{AP} \) by applying (3.6.1) between points \(A\) and \(P\text{.}\) Comment.
Solution.
We find velocity of \(B\) from that of \(A\) according to (3.6.1) by considering \(A\) and \(B\) two points attached to \(\cB\text{.}\) First we find \(\vel_{A/\cE}\) by taking the time-derivative of position vector \(\br_{OA} = a \bha_1\text{:}\)
\begin{equation*}
\vel_{A /\cE} = a \bom_{\cA /\cE} \times \bha_1 = a \dot{\alpha} \bha_2
\end{equation*}
We can now find \(\vel_{B / \cE}\) with \(\bom_{\cB/\cE} = \dot{\al} \be_3+ \dot{\beta} \bha_2\text{:}\)
\begin{align*}
\vel_{B / \cE} \amp = \vel_{A /\cE} +\bom_{\cB /\cE} \times \br_{AB}
=
a \dot{\alpha} \bha_2 + (\dot{\alpha} \be_3 + \dot{\beta} \bha_2 )\times b \bhb_3\\
\amp = (a \dal + b \dal \sin\beta) \bha_2 + b \dbe \, \bhb_1
\end{align*}
We can find the same result by time-differentiating the position vector \(\br_{OB}= a \bha_1 + b \bhb_3\) relative to \(\cE\text{:}\)
\begin{align*}
\vel_{B / \cE}\amp = a \left( {d\bha_1 \over dt}\right)_\cE + b \left(
{d \bhb_3 \over dt}\right)_\cE =a \dot{\alpha} \bha_2 + b (\dal\be_3 + \dbe \bha_2)\times
\bhb_3 \\
\amp = a \dot{\alpha} \bha_2 + b (\dal \sin\beta \bha_2 + \dbe \bhb_1)
\end{align*}
We found the expression of \(\vel_{P/\cE}\) in Example 3.2.12:
Comparing with the previous expression, we notice that we do not obtain the expression of \(\vel_{P/\cE}\text{:}\) this is not unexpected since point \(P\) is not attached to body \(\cB\) at all time. However we may denote this expression as \(\vel_{P\in\cB/\cE}\) to represent the velocity of the point of \(\cB\) which coincides with \(P\text{.}\) In fact we find \(\vel_{P/\cE} - \vel_{P \in \cB / \cE} = \dro \, \bhb_3\text{.}\) For a point such as \(P\) we have
Notation. In view of the previous problem, the notation \(\vel_{P\in \cB/\cA}\) will be used to denote
the velocity of a point \(P\) attached to body \(\cB\) (in motion relative to \(\cA\text{.}\) at all time, in which case \(\vel_{P\in \cB /\cA} =(d\br_{AP}/dt)_\cA\) (taking \(A\) as an origin of \(\cA\)). Here, the notation serves to emphasize that \(P\) is a point of \(\cB\text{.}\)
the velocity of a point \(P\) instantaneously attached to body \(\cB\text{,}\) in which case \(\vel_{P\in \cB /\cA}\) cannot be found as \((d\br_{AP}/dt)_\cA\) but rather by applying formula (3.6.1).
Remark3.6.6.
Whenever \(P\) is attached to \(\cB\) at all time, the notation \(P\in\) is redundant: \(\vel_{P \in \cB /\cA} = \vel_{P/\cA} .\)
Remark3.6.7.
We will learn in Chapter 6 that the difference \(\vel_{P/\cA} -\vel_{P\in \cB/\cA}\) is nothing but \(\vel_{P/\cB}\text{.}\)
Remark3.6.8.
In practice, the only way to determine the velocity \(\vel_{P \in \cB /\cA}\) for a point \(P\) which is not attached to \(\cB\) at all time is to apply formula (3.6.1) by relating \(P\) to a particular point attached to \(\cB\) at all times.
Here is an example to illustrate this point.
Example3.6.9.
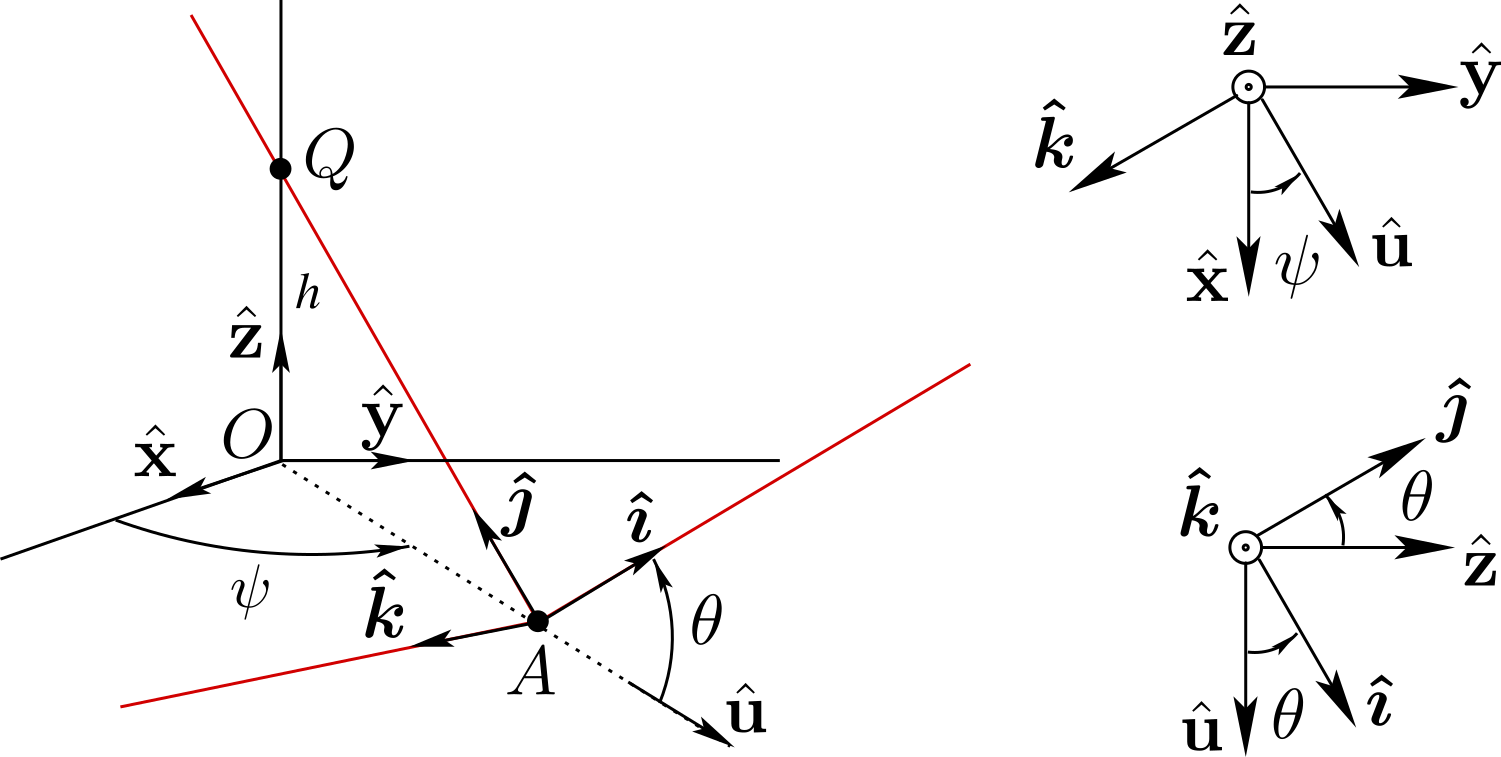
The motion of a referential \(\cA (A, \, \bi , \bj , \bk)\) relative to a referential \(\cE (O , \, \bx , \by , \bz)\) is characterized by the following conditions at all time:
line \((A, \bk)\) attached of \(\cA\) is constrained to lie into the plane \((O , \bx, \by)\) of \(\cE\text{,}\)
line \((A, \bj)\) attached to \(\cA\) is constrained to pass through a point \(Q\) located on axis \((O, \bz)\) at a constant distance \(h\) from \(O\text{.}\)
Unit vector \(\bk\) is defined as \(\bi \times \bj\text{.}\) The set \((\bi,\bj, \bk)\) defines a basis of unit vectors attached to \(\cA\text{.}\) Its orientation relative to \((\bx , \by , \bz)\) is defined by angles \(\psi\) and \(\theta\text{.}\) See Figure 3.6.10.
Figure3.6.10.
Find the angular velocity of \(\cA\) and the velocity \(\vel_{A /\cE}\) of point \(A\) (relative to \(\cE\)).
Find the velocity \(\vel_{Q \in\cA /\cE}\text{,}\) and compare with velocities \(\vel_{Q/\cE} =(d\br_{OQ} / dt)_\cE\) and \(\vel_{Q/\cA} =(d\br_{AQ} / dt)_\cA\text{.}\)
Solution.
After sketching the rotation diagrams which map basis \((\bx , \by , \bz)\) to basis \((\bi , \bj , \bk)\) we find the angular velocity of \(\cA\) relative to \(\cE\) as
The velocity of point \(A\) can be found by differentiating \(\br_{OA} = h \tan\te \bu\text{:}\)
\begin{equation*}
\vel_{A/\cE} = h (\dte/ \cos^2 \te)\bu - h \dpsi \tan\te \bk
\end{equation*}
where we have used \((d\bu /dt)_\cE = - \dpsi \bk\text{.}\)
Point \(Q\) is not attached to \(\cA\text{,}\) and hence, the velocity \(\vel_{Q\in\cA/\cE}\) cannot be found by differentiating \(\br_{OQ}\) relative to \(\cE\text{.}\) It can be found by relating it to the velocity of point \(A\) relative to \(\cE\text{:}\)
First we find \(\vel_{Q/\cE}= (d\br_{OQ}/dt )_\cE = \bze\) since vector \(\br_{OQ}\) is fixed relative to \(\cE\text{.}\) Then to find \(\vel_{Q/\cA}\) we need to differentiate vector \(\br_{AQ} = (h/\cos\te)\bj\) relative to \(\cA\text{:}\)
\begin{equation*}
\vel_{Q/\cA} = h \dte (\sin\te /\cos^2\te) \bj
\end{equation*}
since unit vector \(\bj\) is attached to \(\cA\text{.}\) Hence we recognize that