Robust Intelligence
NSF
Hearing the “shape of a drum” refers to a long standing mathematical problem of determining a drum’s membrane geometry from its vibration modes. This problem relates to applications in pattern recognition and shape identification. In 1992, it was shown that the shape of the drum cannot be uniquely determined by its vibration modes, but some encouraging results suggest that certain combinations of the Dirichlet eigenvalues can provide reliable, scaling and rotation invariant descriptors for a planar curve.
This project builds on this idea and suggests new ways in which formations of robots can collect data, implement a spatially distributed neural network on their on-board processors, and autonomously classify what “they are looking at” collectively, without any one of them having to piece together the whole picture and perform the computation alone. The distributed approach to motion control, data collection, and processing gives inherent robustness both against measurement noise and physical failures, and does not necessitate human involvement in the interpretation of the data.
A more comprehensive Final Project Report
This material is based upon work supported by the National Science Foundation under Grant No. 0822845. Any opinions, findings and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Hearing the shape of a drum
Jul 15, 2009
A swarm of robots, that each searches a portion of a large region, can collectively identify patterns in their sensory data, without any of them having the whole picture. They communicate locally and share bits of information, but none of them carries the full burden of collecting and analyzing the data.
Publications
-
•Flocking, Formation Control and Path Following for a Group of Mobile Robots. IEEE Transactions on Control Systems Technology. (conditionally accepted)
-
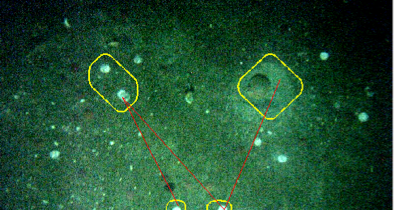
•Identifying sea scallops from benthic camera images. ASLO Limnology and Oceanography: Methods. 2014
-
•Automated detection of scallops in their natural environment. IEEE Mediterranean Conference on Control and Automation. 2013
-
•Flocking with formation control in mobile sensor networks for area search. MSc Thesis 2012.
-
•Multi-agent navigation functions revisited. IEEE Transactions on Robotics. 2012
-
• Spatially distributed cellular neural networks. International Journal of Intelligent Computing and Cybernetics, 2011
-
•Topology Optimization in Cellular Neural Networks. IEEE CDC, 2011.
-
•Topology optimization in spatially distributed cellular neural network. MSc Thesis. 2012
-
•Nonsmooth multi-agent navigation functions. MSc Thesis. 2012
-
•Topology Optimization in Cellular Neural Networks. Technical Report UDMETR-2010-003, (2010). http://dspace.udel.edu:8080/dspace/handle/19716/5658