Problem 1 (60%)
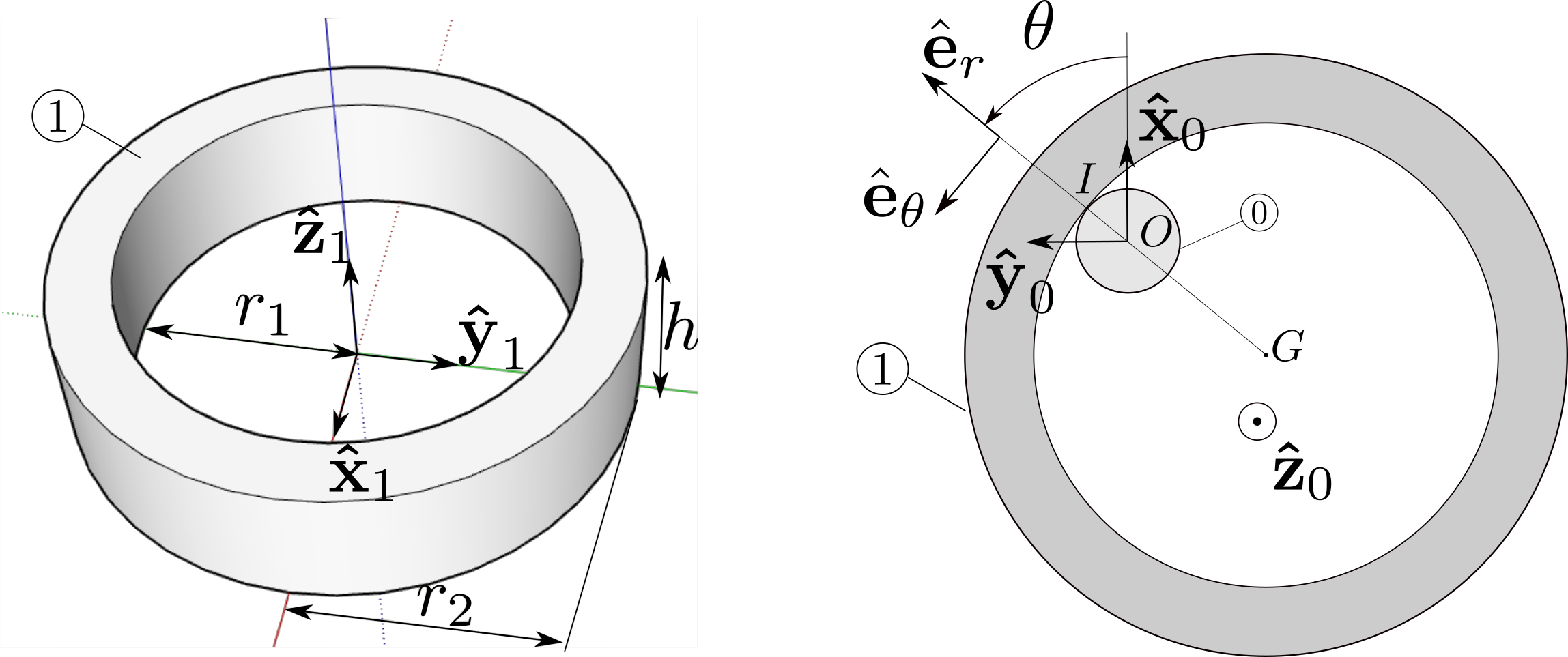
Consider the body 1 shown in Figure 1 in the form of a cylindrical ring of mass \(m\), inner radius \(r_1\), outer radius \(r_2\), and height \(h\). Denote its mass center \(G\), and its basis \((\boldsymbol{\hat{x}}_1,\boldsymbol{\hat{y}}_1,\boldsymbol{\hat{z}}_1)\). Thanks to its axisymmetry, its inertia operator about \(G\) takes the form \[ [{\cal I}_G]= \begin{bmatrix} A & 0 & 0\\ 0 & A & 0 \\ 0 & 0 & C \end{bmatrix}_b \] on any basis \(b (-, -, \boldsymbol{\hat{z}}_1)\).
Body 1 is then suspended to a fixed horizontal rod 0 of axis \((O,\boldsymbol{\hat{z}}_0)\) and radius \(r\). It is then set in motion so that the contact line \((I,\boldsymbol{\hat{z}}_0)\) of body 1 remains parallel to axis \((O,\boldsymbol{\hat{z}}_0)\). Hence the motion is planar and can be studied in vertical plane \((O,\boldsymbol{\hat{x}}_0,\boldsymbol{\hat{y}}_0)\) which contains points \(G\) and \(I\). The conditions are such that the body rolls without slipping about line \(Iz\) and does not lose contact with its support. The orientation of line \(OI\) is defined by angle \(\theta\). The corresponding basis is denoted \((\boldsymbol{\hat{e}}_r, \boldsymbol{\hat{e}}_\theta)\). Gravitational acceleration is defined by the constant vector \({\bf g} = -g \boldsymbol{\hat{x}}_0\). Rolling friction is neglected.
1.1. Find the moment of inertia \(I_{Gz}=C\) of body 1 about its axis \(Gz\) without numerical integration as a function of \(m\) and \(r_1\) and \(r_2\).
Hint: Use the fact that \(I_{Oz} = MR^2 /2\) for a full cylinder of mass \(M\), radius \(R\) and axis \(Oz\).
1.2. Find the kinematic screw of body 1 resolved about mass center \(G\). Account for the no-slip condition to find angular velocity \(\boldsymbol{\omega}_{1/0}\) in terms of \(\dot{\theta}\) and the geometric parameters. How many degrees of freedom does the body possess?
1.3. Apply the FTD to find the equation of motion governing angle \(\theta\) and the normal reaction at \(I\). Can a first-integral of motion be found? Under what condition does the body remain in contact with its support?
1.4. Assume that the angle \(\theta\) remains small: show that body 1 exhibits small amplitude oscillations, and find the period of these oscillations.
Solution
Question 1.1. To find the moment of inertia \(C\) of body 1 about its axis \(Gz\), we consider the cylinder of mass \(m_2\), radius \(r_2\) and axis \(Gz\) and the cylinder of mass \(m_1\), radius \(r_1\) and axis \(Gz\): we have \[ \frac{1}{2} m_2 r_2^2 = \frac{1}{2} m_1 r_1^2 + C \] The masses of these 3 bodies are given by \[ m_2 = \rho (\pi r_2^2 h), \qquad m_1 = \rho (\pi r_2^2 h), \qquad m= m_2 -m_1 \] We can then express \(m_1\) and \(m_2\) in terms of mass \(m\): \[ m_1 = m \frac{r_1^2}{r_2^2- r_1^2}, \qquad m_2 = m \frac{r_2^2}{r_2^2- r_1^2} \] Then moment of inertia \(C\) is found to be \[ C= \frac{1}{2} (m_2 r_2^2 - m_1 r_1^2)= \frac{1}{2} m (\frac{r_2^4}{r_2^2- r_1^2} - \frac{r_1^4}{r_2^2- r_1^2} ) \] or \[ \boxed{ C= \frac{1}{2} m (r_2^2 + r_1^2) } \]
Question 1.2. To find the kinematic screw of body 1 resolved about mass center \(G\), first we find the velocity of \(G\): with \(\boldsymbol{r}_{OG} = -(r_1-r) \boldsymbol{\hat{e}}_r\), we find \[ \boldsymbol{v}_G = -(r_1-r) \dot{\theta}\boldsymbol{\hat{e}}_\theta \] This gives the expression \[ \{ {\cal V}_{1/0} \} = \begin{Bmatrix} \omega_{1/0} \boldsymbol{\hat{z}}_0 \\ -(r_1-r) \dot{\theta}\boldsymbol{\hat{e}}_\theta \end{Bmatrix}_G \] where \(\omega_{1/0}\) is found by imposing the no-slip condition at \(I\): \[ \boldsymbol{v}_{I\in 1/0} = -(r_1-r) \dot{\theta}\boldsymbol{\hat{e}}_\theta+ \omega_{1/0} \boldsymbol{\hat{z}}_0\times r_1 \boldsymbol{\hat{e}}_r = \boldsymbol{0} \] This gives \[ \boxed{ \omega_{1/0} = \frac{r_1-r}{r_1} \dot{\theta} } \]
The body has 1 degree of freedom (angle \(\theta\)).
Question 1.3. We apply the FTD \(\{{\cal D}_{1/0}\}= \{{\cal A}_{ext\to 1}\}\) to find \[ \begin{Bmatrix} -m(r_1-r) (\ddot{\theta}\boldsymbol{\hat{e}}_\theta-\dot{\theta}^2 \boldsymbol{\hat{e}}_r) \\ C \dot{\omega}_{1/0} \boldsymbol{\hat{z}}_0 \end{Bmatrix}_G = \begin{Bmatrix} -mg \boldsymbol{\hat{x}}_0 \\ \boldsymbol{0} \end{Bmatrix}_G + \begin{Bmatrix} N \boldsymbol{\hat{e}}_r + F\boldsymbol{\hat{e}}_\theta \\ \boldsymbol{0} \end{Bmatrix}_I \] where the contact force is decomposed in terms of a normal component \(N\) and a tangential component \(F\) (friction). This gives 3 equations: \[\begin{align*} m(r_1-r) \dot{\theta}^2 = N - mg \cos\theta& \qquad (1) \\ - m(r_1-r) \ddot{\theta}= F + mg \sin\theta& \qquad (2) \\ C \frac{r_1-r}{r_1} \ddot{\theta}= r_1 F & \qquad (3) \end{align*}\] If we combine (2) and (3) we find the equation of motion \[ \boxed{ \frac{r_1-r}{2r_1} (3r_1^2 + r_2^2) \ddot{\theta}= -g r_1 \sin\theta \qquad\qquad (4) } \] (after using the expression of \(C\) found in q. 1.1). Equation (1) gives the normal reaction \(N\) as a function of \(\theta\). After pre-multiplying (4) by \(\dot{\theta}\), we find that (4) in the form \[ \frac{d}{dt}(\frac{\dot{\theta}^2}{2}) + Cst \frac{d}{dt}(\cos\theta)= 0 \] gives a a first-integral of motion \[ \boxed{ \frac{r_1-r}{4r_1} (3r_1^2 + r_2^2) \dot{\theta}^2 = g r_1 \cos\theta+ C_0 \qquad\qquad (5) } \] where the constant \(C_0\) is found from the initial conditions. The body remains in contact with its support as long as \(N >0\) during the motion. With \[ N= m(r_1-r) \dot{\theta}^2 + mg \cos\theta \] and upon using (5), we find that \(N>0\) is equivalent to \(\cos\theta> A\), where \(A\) is a constant (which depends on the geometric parameters and constant \(C_0\)). If \(|A|< 1\), then the body will lose contact at some angle \(\theta_1 = \cos^{-1} A\). Whether this takes place or not depends on the initial conditions (through constant \(C_0\)).
Question 1.4. If the angle \(\theta\) remains small, then (4) can be written in the form \[ \frac{r_1-r}{2r_1} (3r_1^2 + r_2^2) \ddot{\theta}+ g r_1 \theta=0 \] This equation shows that body 1 exhibits small amplitude oscillations about the position \(\theta=0\), of period given by \[ \boxed{ T = 2\pi \sqrt{\frac{3k (r_1-r)}{2g}} } \] with \(k= 1+ r_2^2/3r_1^2\).
Problem 2 (40%)
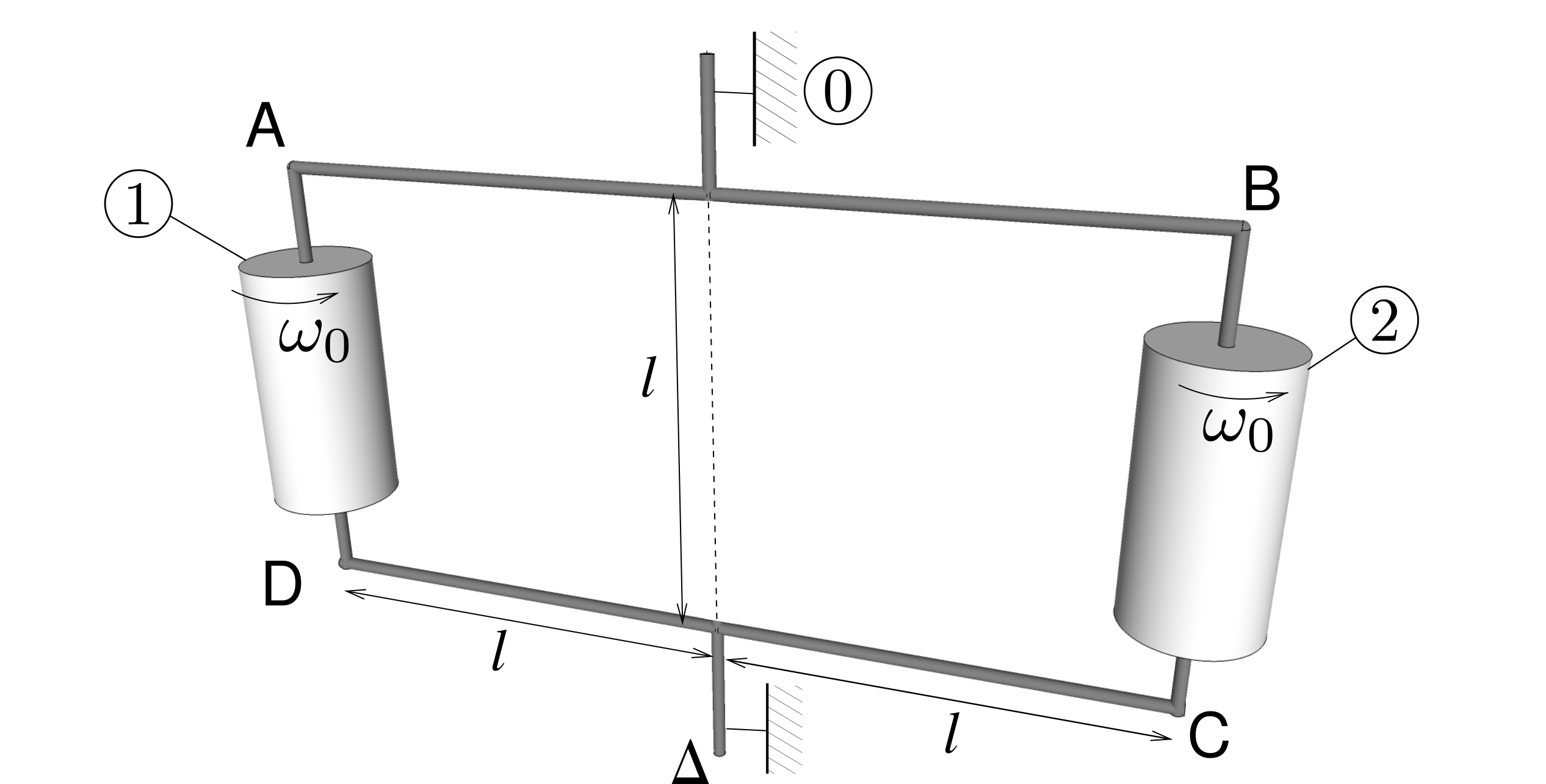
A rigid rectangular frame \(ABCD\) of negligible mass is free to rotate about a frictionless vertical axis \(\Delta\). Two identical cylinders 1 and 2 are mounted on the vertical sides \(AD\) and \(BC\) of the frame about which they can rotate without friction. See Figure 2.
Initially, the frame is stationary and the two cylinders rotate at the same angular velocity \(\boldsymbol{\omega}_0\) (assumed counterclockwise as shown in the figure). Each cylinder has mass \(m\) and mass moment of inertia \(I\) about its axis of rotation.
2.1. An internal mechanism (of negligible mass) attached to the frame suddenly blocks the rotation of cylinder 2. The frame is then observed to rotate: why? Find the angular velocity \(\boldsymbol{\omega}_1\) reached by the frame once cylinder 2 becomes stationary relative to the frame.
2.2. While cylinder 2 remains blocked relative to the frame which rotates at angular velocity \(\boldsymbol{\omega}_1\), a second identical mechanism attached to the frame now blocks the rotation of cylinder 1 relative to the frame. What is the angular velocity \(\boldsymbol{\omega}_2\) reached by the frame once cylinder 1 becomes stationary relative to the frame?
Solution
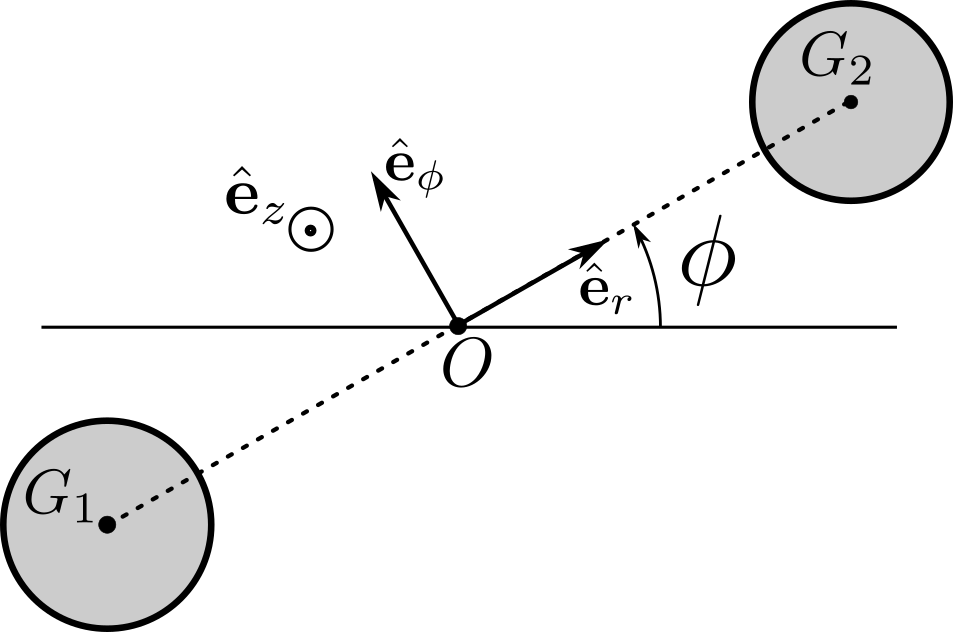
Denote by \(\Sigma\) the system comprised of the massless frame and the two cylinders 1 and 2 and introduce angle \(\phi\) to define the orientation of the frame at an arbitrary time. The corresponding unit vectors are \((\boldsymbol{\hat{e}}_r,\boldsymbol{\hat{e}}_\phi)\). See Figure 2.
At any given time, the angular momentum of system \(\Sigma\) about axis \(\Delta = (O,\boldsymbol{\hat{e}}_z)\) is conserved since \[ \boldsymbol{M}_{O, \bar{\Sigma}\to\Sigma} \cdot \boldsymbol{\hat{e}}_z = \underbrace{\boldsymbol{M}_{O, \bar{\Sigma}\to\Sigma}^c \cdot \boldsymbol{\hat{e}}_z}_{\text{frictionless pivots}} + \underbrace{\boldsymbol{M}_{O, \bar{\Sigma}\to\Sigma}^g \cdot \boldsymbol{\hat{e}}_z}_{\text{gravity}} = 0 \] With \(\boldsymbol{D}_{O, \Sigma}\cdot \boldsymbol{\hat{e}}_z = {d\over dt} \boldsymbol{H}_{O,\Sigma} \cdot \boldsymbol{\hat{e}}_z\), this implies \[ \boxed{ \boldsymbol{H}_{O,1} \cdot \boldsymbol{\hat{e}}_z +\boldsymbol{H}_{O,2} \cdot \boldsymbol{\hat{e}}_z = \text{constant} } \] where the constant is defined by the initial conditions: prior to blocking the rotation of the cylinders, both cylinders rotate at the angular velocity \(\omega_0\boldsymbol{\hat{e}}_z\). Once the rotation of cylinder 2 is blocked, its angular momentum about \(\Delta\) is altered. To maintain conservation of \(\boldsymbol{H}_{O,\Sigma} \cdot \boldsymbol{\hat{e}}_z\) of the system, the frame must necessarily rotate.
We can find the angular momentum of the system at any given time, denoting the angular velocities of the cylinders and the frame as \(\Omega_1 \boldsymbol{\hat{e}}_z\), \(\Omega_2 \boldsymbol{\hat{e}}_z\) and \(\dot{\phi}\boldsymbol{\hat{e}}_z\), respectively: \[ \text{Body 1: } \boldsymbol{H}_{O,1} \cdot \boldsymbol{\hat{e}}_z = (\boldsymbol{H}_{G_1,1} + \boldsymbol{r}_{OG_1} \times m \boldsymbol{v}_{G_1} ) \cdot \boldsymbol{\hat{e}}_z = I \Omega_1 + (-l \boldsymbol{\hat{e}}_r) \times (-ml \dot{\phi}\boldsymbol{\hat{e}}_\phi) \cdot \boldsymbol{\hat{e}}_z = I \Omega_1 + ml^2 \dot{\phi} \] \[ \text{Body 2: } \boldsymbol{H}_{O,2} \cdot \boldsymbol{\hat{e}}_z = (\boldsymbol{H}_{G_2,2} + \boldsymbol{r}_{OG_2} \times m \boldsymbol{v}_{G_2} ) \cdot \boldsymbol{\hat{e}}_z = I \Omega_2 + (l \boldsymbol{\hat{e}}_r) \times (ml \dot{\phi}\boldsymbol{\hat{e}}_\phi) \cdot \boldsymbol{\hat{e}}_z = I \Omega_2 + ml^2 \dot{\phi} \] Conservation of angular momentum of the system about \(\Delta\) can be stated as \[ \boxed{ I (\Omega_1 + \Omega_2) + 2 ml^2 \dot{\phi}= 2 I\omega_0 } \] since at \(t=0\), \(\Omega_1=\Omega_2 = \omega_0\) and \(\dot{\phi}=0\).
Also, in the absence of friction on the axle of the cylinders, the angular momentum of each cylinder is conserved, as long as their rotation is free: this leads to \(\Omega_i = \text{constant}\).
Question 2.1. After cylinder 2 is immobilized, the frame and cylinder 2 rotate at angular velocity \(\boldsymbol{\omega}_1= \dot{\phi}_1 \boldsymbol{\hat{e}}_z\) (since the cylinder is now rigidly attached to the frame), while cylinder 1 continues to rotate at angular velocity \(\Omega_1 \boldsymbol{\hat{e}}_z= \omega_0\boldsymbol{\hat{e}}_z\) (the angular momentum of cylinder 1 is still conserved). With \(\Omega_2= \dot{\phi}_1\) and \(\Omega_1= \omega_0\), conservation of angular momentum of the system about axis \(\Delta\) now gives \[ I (\omega_0 + \dot{\phi}_1) + 2 ml^2 \dot{\phi}_1 = 2I \omega_0 \] leading to \[ \boxed{ \dot{\phi}_1 = \frac{I}{ 2ml^2 +I } \omega_0 } \] This gives the angular velocity \(\boldsymbol{\omega}_1 =\dot{\phi}_1\boldsymbol{\hat{e}}_z\) of the frame.
Question 2.2. Now both cylinders are immobilized relative to the frame. The angular velocities of the cylinders are both equal to that of the frame: \(\Omega_1 =\Omega_2 = \dot{\phi}_2\). Now conservation of angular momentum of the system about \(\Delta\) gives \[ (2I+ 2ml^2) \dot{\phi}_2 = 2I \omega_0 \] leading to \[ \boxed{ \dot{\phi}_2 = \frac{I}{I+m l^2} \omega_0 } \] This gives the final angular velocity \(\boldsymbol{\omega}_2 =\dot{\phi}_2 \boldsymbol{\hat{e}}_z\) of the frame.
If the both cylinders initially rotate in the counterclockwise direction (\(\omega_0 >0\)), then the frame rotates in the counterclockwise direction in both situations, since we found \(\dot{\phi}_2 > \dot{\phi}_2 >0\).
© 2026 R. Valéry Roy.